







视频讲解
一文搞定!ROS2 中用 MoveIt2 精准操控 Panda 机械臂末端至固定位姿
在《ROS2 应用:按键控制 MoveIt2 中 Panda 机械臂关节位置》中介绍了如何控制关节位置,今天介绍下如何控制笛卡尔空间下的末端位姿
创建package,命名panda_moveit_controller,依赖moveit_ros_planning_interface
ros2 pkg create --build-type ament_cmake panda_moveit_controller --dependencies rclcpp moveit_ros_planning_interface
在~/ros2_ws/src/panda_moveit_controller/src目录下创建panda_moveit_control.cpp
#include <rclcpp/rclcpp.hpp>
#include <moveit/move_group_interface/move_group_interface.h>
#include <moveit/planning_scene_interface/planning_scene_interface.h>
#include <tf2/LinearMath/Quaternion.h>
#include <tf2_geometry_msgs/tf2_geometry_msgs.h>
#include <cmath>
// 定义一个将度数转换为弧度的函数
double degreesToRadians(double degrees) {
return degrees * M_PI / 180.0;
}
int main(int argc, char** argv)
{
rclcpp::init(argc, argv);
auto node = rclcpp::Node::make_shared("panda_moveit_control");
// 创建MoveGroupInterface对象,指定规划组名称
moveit::planning_interface::MoveGroupInterface move_group(node, "panda_arm");
// 创建PlanningSceneInterface对象
moveit::planning_interface::PlanningSceneInterface planning_scene_interface;
// 获取规划组的参考坐标系
std::string planning_frame = move_group.getPlanningFrame();
RCLCPP_INFO(node->get_logger(), "Planning frame: %s", planning_frame.c_str());
// 获取规划组的末端执行器名称
std::string end_effector_link = move_group.getEndEffectorLink();
RCLCPP_INFO(node->get_logger(), "End effector link: %s", end_effector_link.c_str());
// 设置目标位置
geometry_msgs::msg::Pose target_pose;
// 定义欧拉角(单位:弧度)
double roll = degreesToRadians(0.0);
double pitch = degreesToRadians(180.0);
double yaw = degreesToRadians(0.0);
// 创建一个四元数对象
tf2::Quaternion quaternion;
// 根据欧拉角设置四元数
quaternion.setRPY(roll, pitch, yaw);
// 将tf2的四元数转换为geometry_msgs的四元数
target_pose.orientation = tf2::toMsg(quaternion);
target_pose.position.x = 0.4;
target_pose.position.y = 0.1;
target_pose.position.z = 0.4;
move_group.setPoseTarget(target_pose);
// 进行运动规划
moveit::planning_interface::MoveGroupInterface::Plan my_plan;
bool success = (move_group.plan(my_plan) == moveit::core::MoveItErrorCode::SUCCESS);
RCLCPP_INFO(node->get_logger(), "Planning %s", success ? "SUCCEEDED" : "FAILED");
// 执行运动规划
if (success) {
move_group.execute(my_plan);
}
rclcpp::shutdown();
return 0;
}修改CMakeLists.txt文件
cmake_minimum_required(VERSION 3.8)
project(panda_moveit_controller)
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
# 查找依赖项
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(moveit_ros_planning_interface REQUIRED)
# 添加可执行文件
add_executable(panda_moveit_control src/panda_moveit_control.cpp)
ament_target_dependencies(panda_moveit_control rclcpp moveit_ros_planning_interface)
# 安装可执行文件
install(TARGETS
panda_moveit_control
DESTINATION lib/${PROJECT_NAME}
)
ament_package()编译运行
一个终端启动panda机械臂在Rviz中的场景
ros2 launch moveit2_tutorials demo.launch.py rviz_config:=panda_moveit_config_demo_empty.rviz另一个启动末端控制
cd ~/ros2_ws
colcon build --packages-select panda_moveit_controller
source install/setup.bash
ros2 run panda_moveit_controller panda_moveit_control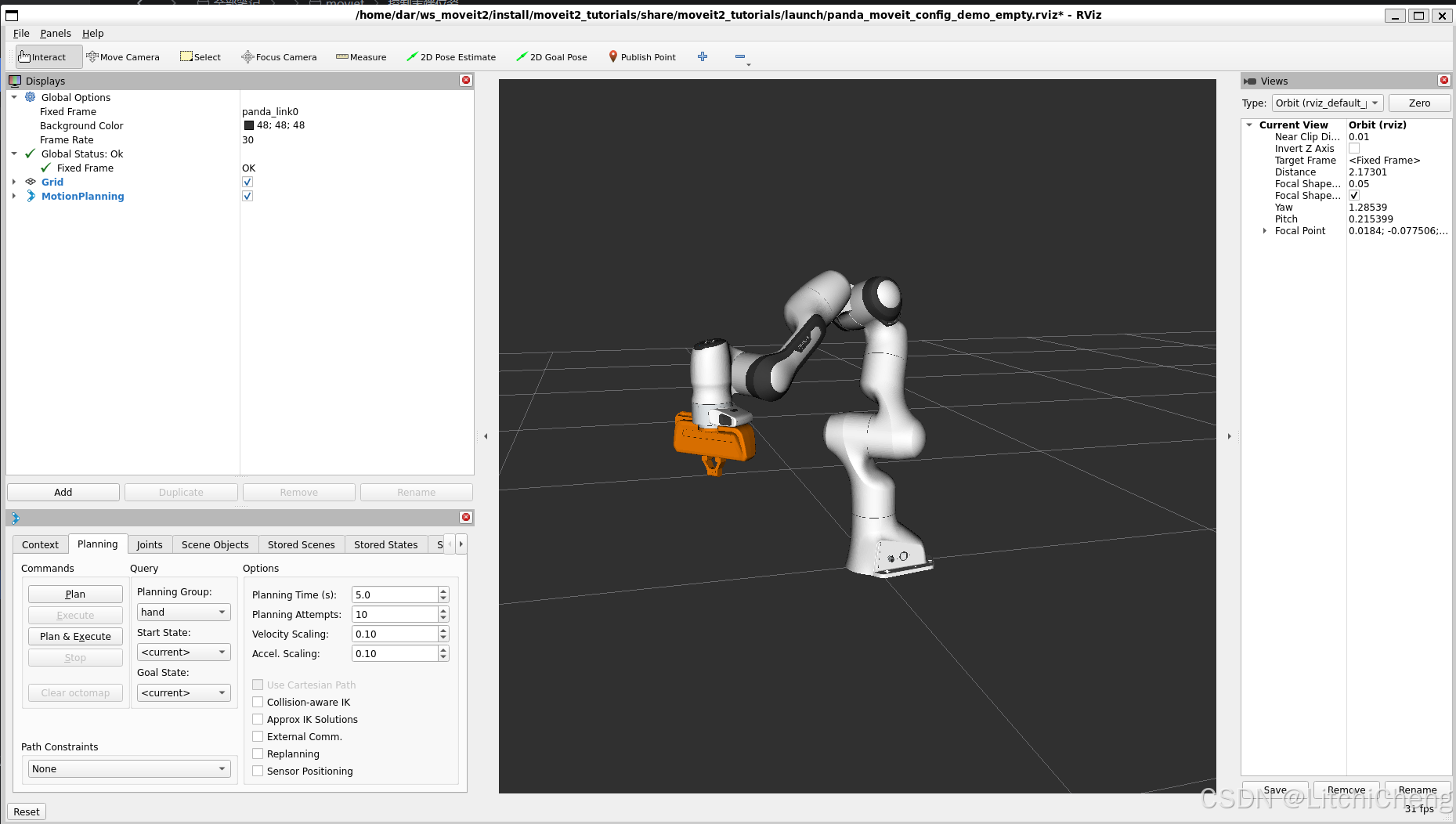

















 2092
2092

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









