




《视觉SLAM十四讲》第三讲知识点之Rodrigus公式
- 视觉SLAM十四讲——第三讲三维空间刚体运动中有提到Rodrigus’ Formula来实现旋转变量和旋转矩阵之间的变换关系。
- 旋转矩阵的缺点:a. 一次旋转只有三个自由度,使用SO(3)旋转矩阵的表达方式存在冗余;b. 旋转矩阵本身带有约束(正交矩阵,且行列式为1),这些约束会使得求解变得更困难
- 旋转向量:任意旋转都可以用一个旋转轴和一个旋转角来刻画。这种表示方式可以更加紧凑的描述旋转和平移
- 由旋转向量得到旋转矩阵:

其中,符号^是向量到反对称的转换符

- 由旋转矩阵到旋转向量的转换,对于转角θ
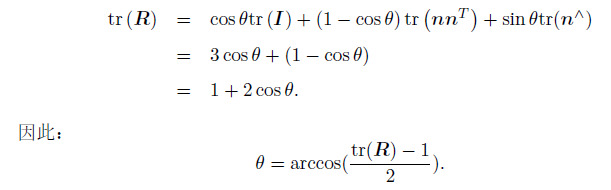
其中,对于转轴n,由于旋转轴上的向量在旋转后不发生改变,所以,转轴n是矩阵R特征值1对应的特征向量

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









