




 本文详细介绍了罗德里格斯公式的推导过程,从向量的加法规则出发,结合点乘、叉乘、向量投影和双重向量积等基础知识,逐步解析旋转向量的矩阵表示。通过单位向量k的反对称矩阵形式,最终得到旋转矩阵的表达式,展示了向量旋转与旋转矩阵之间的转换关系。
本文详细介绍了罗德里格斯公式的推导过程,从向量的加法规则出发,结合点乘、叉乘、向量投影和双重向量积等基础知识,逐步解析旋转向量的矩阵表示。通过单位向量k的反对称矩阵形式,最终得到旋转矩阵的表达式,展示了向量旋转与旋转矩阵之间的转换关系。
视觉SLAM十四讲 罗德里格斯公式推导(没有省略任何步骤)
最近在学习高翔的视觉SLAM十四讲,在第三章提到了罗德里格斯公式(Rodrigue’s Formula),但书中并没有给出相应的推导公式。在网上搜了不上相关的博客,看了好几篇才看明白,一些基础知识并没有在公式推导过程中给出,导致一开始看得云里雾里。
所以这篇博客就是总结罗德里格斯公式推导过程以及过程中所对应的知识点,包括一些基础知识。我在这篇博客里的公式推导比较详细,把一些其他博客省略的步骤加了进去。
1. 罗德里格斯公式推导
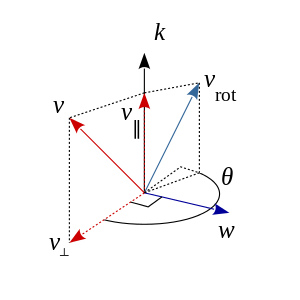
整个推导过程都是围绕这上面这张图展开的,其中 V V V是要旋转的向量, V r o t V_{rot} Vrot是旋转后的向量, k k k是旋转轴方向上的单位向量, V ∣ ∣ V_{||} V∣∣是 V V V关于旋转轴上的平行分量, V ⊥ V_{\bot} V⊥是 V V V关于旋转轴的垂直分量。
搞清楚定义之后,开始进行推导。
根据向量的加法运算:
V = V ∣ ∣ + V ⊥ (1) V = V_{||} + V_{\bot} \tag{1} V=V∣∣+V⊥(1)
现假设 k k k为旋转轴上的单位向量,则 k k k可以表示为:
k = a × b ∣ a × b ∣ (2) k = \frac{a \times b}{|a \times b|} \tag{2} k=∣a×b∣a×b(2)
其中a和b为与k垂直的平面上的两个向量,可以不用在意,只是表述k和平面的垂直关系,后续只用到k。
那么对于 V V V的平行分量和垂直分量,利用向量点乘和叉乘的性质,有:
V ∣ ∣ = ( v ⋅ k ) k (3) V_{||} = (v \cdot k) k \tag{3} V∣∣=(v⋅k)k(3)
v ⊥ = v − v ∣ ∣ = − k × ( k × v ) (4) v_{\bot} = v - v_{||} = -k \times (k \times v) \tag{4} v⊥=v−v∣∣=−k×(k×v)(4)
v ∣ ∣ = v − v ⊥ = v + k × ( k × v ) (5) v_{||}= v - v_{\bot} = v + k \times (k \times v) \tag{5} v∣∣=v−v⊥=v+k×(k×v)(5)
公式3即点乘的性质,比较好理解。在公式4中,我们知道向量之间叉乘得垂直向量,而k是单位向量,则叉乘 k × v k \times v
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 344
344

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









