




 本文介绍了旅行商问题(TSP)的分支界定算法,详细讲解了算法的分支策略、定界策略和分支结点选择,并提供了一个使用IL+SB策略的Python实现示例。通过对图中边的状态进行约束,不断分支并结合下界计算来缩小搜索空间,以求解TSP的精确解。
本文介绍了旅行商问题(TSP)的分支界定算法,详细讲解了算法的分支策略、定界策略和分支结点选择,并提供了一个使用IL+SB策略的Python实现示例。通过对图中边的状态进行约束,不断分支并结合下界计算来缩小搜索空间,以求解TSP的精确解。
TSP问题是非常经典的NP难问题,问题描述很简单,但是求解难度却很大。首先还是给出TSP的数学描述:
- 图G(V,E)G(V,E)G(V,E)是一个无向简单图,集合VVV包含了顶点1,2,...,n1,2,...,n1,2,...,n,集合EEE包含了所有边e(i,j),i,j∈Ve(i,j), i,j\in Ve(i,j),i,j∈V. 每条边e(i,j)e(i,j)e(i,j)都有对应的权重wij≥0w_{ij}\geq0wij≥0. 需要找到一个边集合T⊂ET\subset ET⊂E,其包含的边构成了图的最短路径,最短路径的长度可以定义为∑(i,j)∈Twij\sum_{(i,j)\in T}w_{ij}∑(i,j)∈Twij,图上的每对顶点s,t∈Vs,t\in Vs,t∈V都存在只属于TTT的边来相通,并且每个顶点都只有两个属于TTT的边被确定
一般会把TSP问题用01变量或者置换队列来进行数学描述, 如果是01变量的表述形式,通用的分支界定算法也可以求解,不过我们可以使用一些更加特异化的分支界定算法,更具效率,本文就介绍其中一种
分支界定是一种求精确解的算法,如果TSP的顶点数太多,无论多高明的分支界定算法也无能为力,所以它只适用于规模较小的情况。分支界定算法只是一种算法框架,要应用该算法,需要首先从整体上确定算法中的三个主要成分的实现手段,然后具体细化所有的算法步骤。这三个算法主要成分是:
- 分支策略:我们需要决定如何对父结点进行分支,也就是添加新约束来产生子问题结点;
- 定界策略:在每个问题结点上,需要求解当前约束下的问题下界,同时整个算法也维护一个问题上界,如果该问题的下界大于上界,那么该结点可以进行剪枝;
- 分支结点选择:对于多个可以进行分支的结点,我们也需要用一种选择策略选取结点进行分支
下面我们具体分析. 首先需要确定的是如何表述TSP问题和约束,也就是决策变量是哪个。这里我们明确决策变量是所有边的状态,如果边eij=1e_{ij}=1eij=1,表示该边在路径上(included edge);如果eij=0e_{ij}=0eij=0,表示该边不在路径上(excluded edge),这样求解TSP的过程可以看作是从图中选取边来构成一条最短的路径。
确定分支策略。每一次产生子问题,就是在父问题的图中选择一条尚未确定状态的边来设定状态,加入路径或者排除出路径。在根节点,所有的边都没有确定状态,随着分支过程的进行,越来越多的边的状态被确定,最终达到一些可行解。在选择边的具体实现上,有两种方式:
- 按照字典序选边(Lexicographic Order, LG)。这是比较简单直接的方式,例如在当前结点,边e1,2e_{1,2}e1,2被加入路径,对其进行分支,那么按照字典序就选择边e1,3e_{1,3}e1,3,如果边e1,3e_{1,3}e1,3已经被确定了状态,那就继续看边e1,4e_{1,4}e1,4,以此类推
- 按照边长升序选择(Increasing Length, IL)。就是说选择剩余未明确边中最小长度的边,这种选取方式基于思想是选取更小的边加入路径,更有可能较早地找到最短路径
而在通过分支加入新的边约束之后,一些额外的边状态检查和确定工作也需要被执行,来达到一种类似"约束传播"的效果,减小搜索空间:
- 如果某个顶点上除了两条相邻边,都被排除出了路径,那么这两条边肯定要被加入路径
- 如果某个顶点上已经有两条加入路径的相邻边,那么所有其他的相邻边都要被排除出路径
- 对于一条未确定状态的边,如果把它加入路径会导致子回路产生,那么这条边一定要被排除出路径
接着确定定界策略。全局上界很明显就是当前的最短路径,每次找到一个更短的全路径,就用这个值更新上界;而在每个子问题结点上,如何计算下界是需要着重讨论的。在分支界定算法中,在每个结点上的最优解的目标值是肯定不会比下界更小的,在TSP问题中,下界就是当前结点对应的图中最短路径所能达到的理论最小值(所谓理论,就是除了已经确定好的边,其他未确定状态边可以任意设定状态)。同样我们也有两种计算下界的方法:
- 简单下界(Simple lower bound, SB)。对每个顶点iii,假设(ai,i)(a_i,i)(ai,i)和(bi,i)(b_i,i)(bi,i)是顶点iii的两个相邻边,这两条边要么是已经明确在路径中的,要么是未确定状态边中最短的,那么下界就是所有顶点的这两条边长的总和:
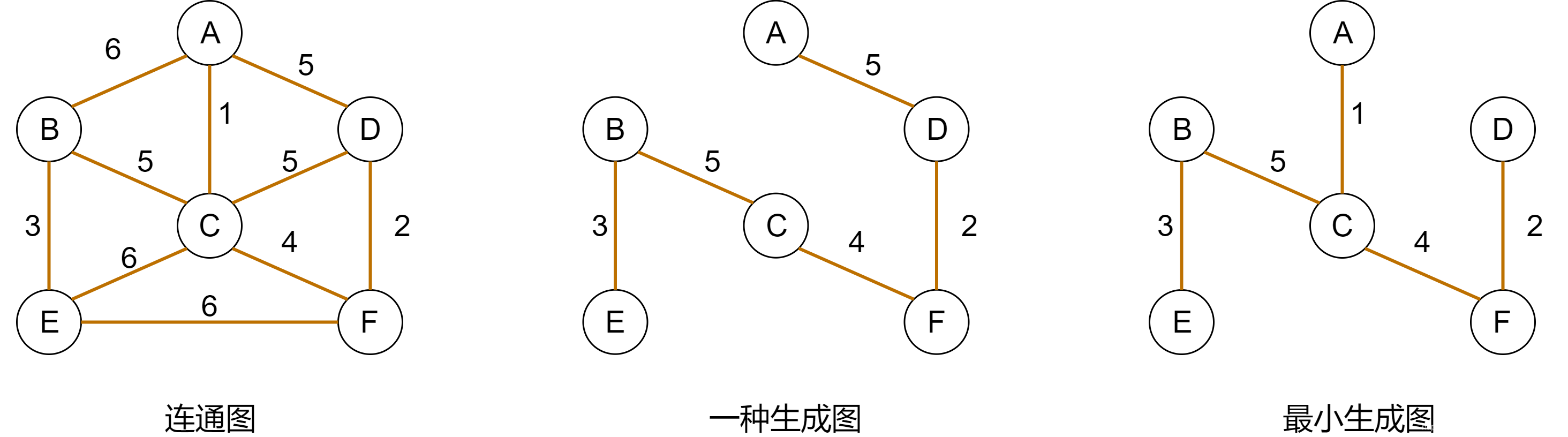
L=12∑i=1nwaii+wbii L=\frac{1}{2} \sum_{i=1}^{n}{w_{a_ii}+w_{b_ii}} L=21i=1∑nwaii+wbii - 1-tree下界(OT)。1-tree是最小生成树的变体,首先生成树指的是指一个连通图的子图,它含有图中全部nnn个顶点,但只有足以构成一棵树的n−1n-1n−1条边,如果生成树中再添加一条边,则必定成环;所有生成树中边权重和最小的叫最小生成树(MST),下图是生成树和最短生成树的示意图:
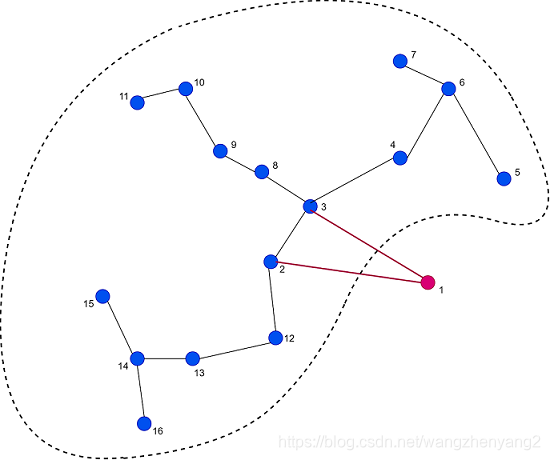
在最小生成图的基础上,我们这样定义1-tree:图G(V,E)G(V,E)G(V,E)是全连接无向图,1-tree是指顶点{ 2,...,n}\{2,...,n\}{ 2,...,n}加上顶点1及顶点1两条相邻边构成的生成树,总权重最小的1-tree则是最小1-tree。最小1-tree可以通过顶点{ 2,...,n}\{2,...,n\}{ 2,...,n}的MST加上顶点1的两条最短边构成,下图是一个最小1-tree的示意图
回到TSP问题,可以用最小1-tree的值来作为下界值,1-tree里的顶点1就是TSP的起点。
最后是分支结点的选择。我们对于最小化问题,一般都会采取更小下界优先的原则,也就是先选下界更小的结点来分支,因为这样找到一个更短路径的可能性更大一些,也就意味着尽可能早的更新全局上界,这样后续分支时也更可能剪枝,提升算法速度。对TSP问题,我们采用同样的策略。
下面用python代码实现一个TSP实例,采用IL+SB策略组合的分支界定算法。首先给出一个距离矩阵作为问题实例,这是一个numpy二维数组,尺寸是14X14,也就是14个顶点:
size=14
costs=np.array([ [0 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章




















 6172
6172



 到【灌水乐园】发言
到【灌水乐园】发言







