 SLAM基础:李群与李代数解析
SLAM基础:李群与李代数解析





 SLAM研究中遇到旋转矩阵求导问题,可通过李群和李代数来解决。李群是具有连续性质的群,如特殊正交群SO(3)和特殊欧氏群SE(3)。李代数是李群单位元处的正切空间,如so(3)和se(3),用于描述一阶导数性质。指数映射和对数映射建立了李群与李代数之间的关系。通过对李代数的操作,可以定义导数模型和扰动模型,解决旋转矩阵无加法操作的问题。
SLAM研究中遇到旋转矩阵求导问题,可通过李群和李代数来解决。李群是具有连续性质的群,如特殊正交群SO(3)和特殊欧氏群SE(3)。李代数是李群单位元处的正切空间,如so(3)和se(3),用于描述一阶导数性质。指数映射和对数映射建立了李群与李代数之间的关系。通过对李代数的操作,可以定义导数模型和扰动模型,解决旋转矩阵无加法操作的问题。
在做SLAM研究的时候,会涉及到对旋转矩阵求导的问题。然而矩阵求导中多个变换矩阵相加问题很难解决,这时候需要使用矩阵李群的知识,将旋转或者变换等矩阵李群形式,映射到李代数上求解。
李群和李代数
群的概念:群(Group)是一种集合加上一种运算的代数结构。
记集合为A,运算为 · ,那么当运算满足以下性质时,称 (A, · )成群:
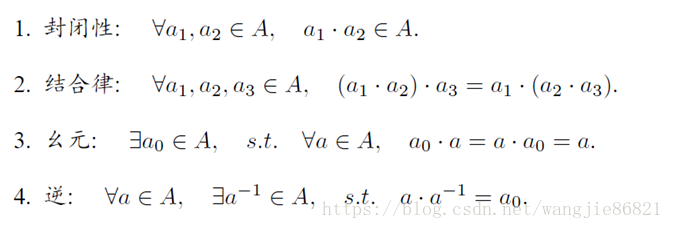
我们可以根据群的概念验证得到:
(1)旋转矩阵集合与矩阵乘法构成群
(2)变换矩阵集合与矩阵乘法构成群
在SLAM当中,我们常用到的群一般有特殊正交群和特殊欧氏群两种

李群
李群主要是指:
具有连续(光滑)性质的群。既是群也是流形。
直观上看,一个刚体能够连续地在空间中运动,故SO(3)和SE(3)都是李群。
但是,SO(3)和SE(3)只有定义良好的乘法,没有加法,所以难以进行取极限、求导等操作。所以我们引出了李代数的概念。
李代数
李代数:与李群对应的一种结构,位于向量空间。事实上是李群单位元处的正切空间。
我们通过旋转矩阵来引出李代数,考虑任意旋转矩阵R,满足
![]()
令R随时间变化(连续运动),有:
两侧对时间求导,可得:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 681
681




 到【灌水乐园】发言
到【灌水乐园】发言







