




3. Lite6底座电气接口
3.1 电气警告和注意事项
在设计和安装机器人应用时,务必遵循以下警告和注意事项。实施维护作业同样要遵循这些警告和注意事项。
| 标志 | |
|---|---|
 |
1. 请确保所有不得沾水的设备都保持干燥。如果有水进入产品,请切断电源,然后联系您的供应商。 2. 仅使用该机械臂的原装电缆。请不要在那些电缆需要弯折的应用中使用机械臂。如果需要更长的电缆或柔性电缆,可以联系您的供应商。 3. 本文提到的所有 GND 接头只适用于供电和传送信号。 4. 当向机械臂的 I/O 安装接口电缆时,务必小心。 |
 |
1. 高于 IEC 标准中规定电平的干扰信号将会造成机械臂的异常行为。信号电平极高或过度暴露将会对机械臂造成永久性的损害。由 EMC 问题造成的任何损失,深圳市众为创造科技有限公司概不负责。 2. 用于连接控制器与其他机械和工厂设备的 I/O 电缆长度不得超过 30 米,除非进行延长测试后表明可行。 |
 |
控制器电气接口接线时,控制器必须断电。 |
 |
切勿将安全信号连接到安全等级不合适的非安全型 PLC。如不遵守该警告,可能会因某项安全停止功能失效而导致人员严重受伤甚至死亡。 |
3.2 通信接口
Lite6底座板提供千兆以太网接口,详见下图。

机械臂电源指示灯: 灯常亮红色,表示机械臂已上电。
运行状态指示灯: 灯闪烁,表示Lite6已开机。
网口: 灯亮,表示机械臂通讯正常。
USB-C: 用于刷系统,仅内部使用,不对外。
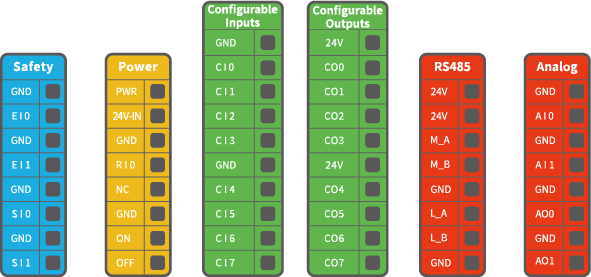
3.3 底座/控制器IO
本章说明了如何连接设备与控制器外部的 I/O。此 I/O 极其灵活,可用于多种不同的设备,其中包括气动继电器、PLC 和紧急停止按钮。
下图显示了控制器内部的电气接口布局。
可配置功能:
| 可配置功能 | CI0-CI7(可配置输入) | 可配置功能 | CO0 - CO7(可配置输出) |
|---|---|---|---|
| 通用输入 | 有 | 通用输出 | 有 |
| 停止运动 | 有 | 运动停止 | 有 |
| 防护重置 | 有 | 运动中 | 有 |
| 离线任务 | 有 | 有警告 | 有 |
| 手动模式 | 有 | 发生碰撞 | 有 |
| 缩减模式 | 有 | 手动模式生效 | 有 |
| 使能机械臂 |
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 731
731

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









