




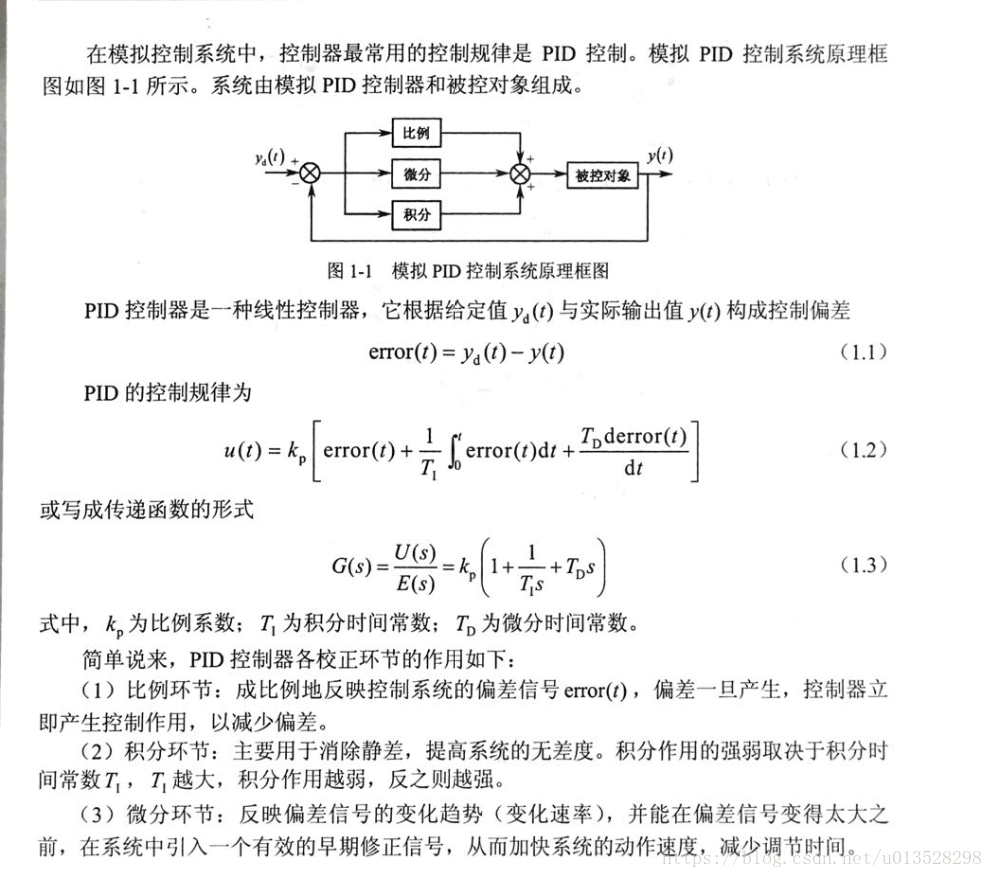
1.PID基本原理
2.原理分析
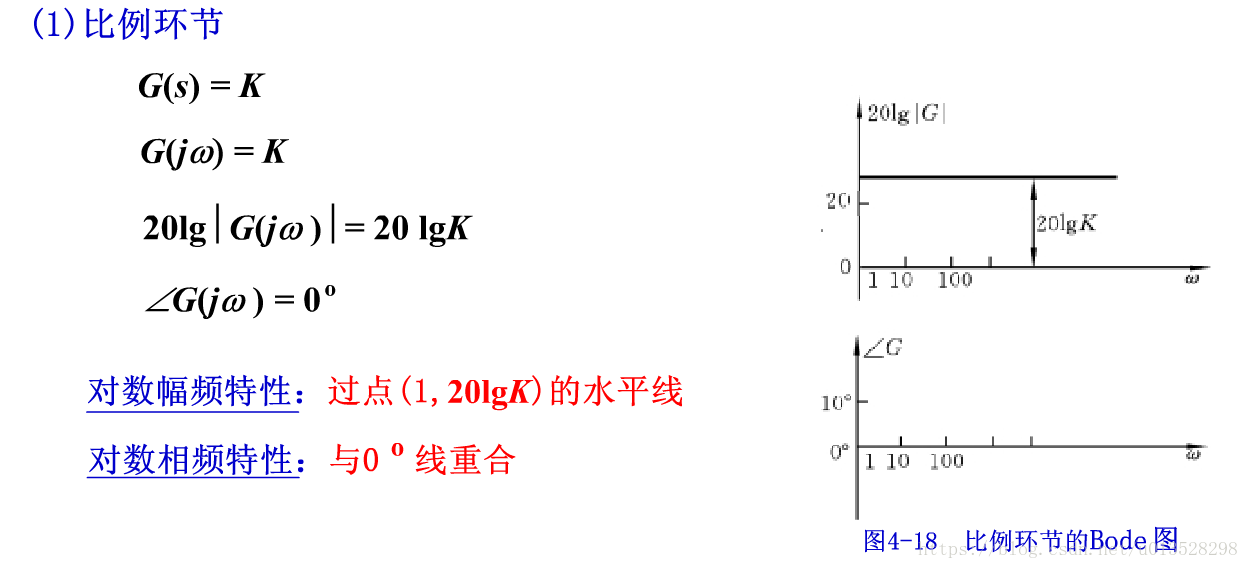
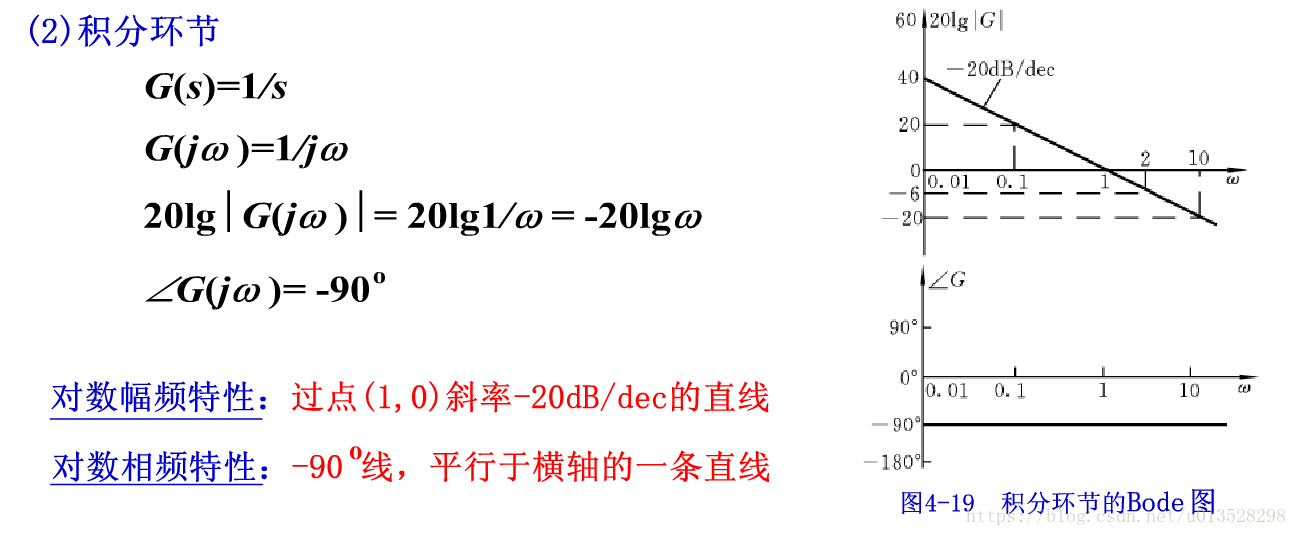
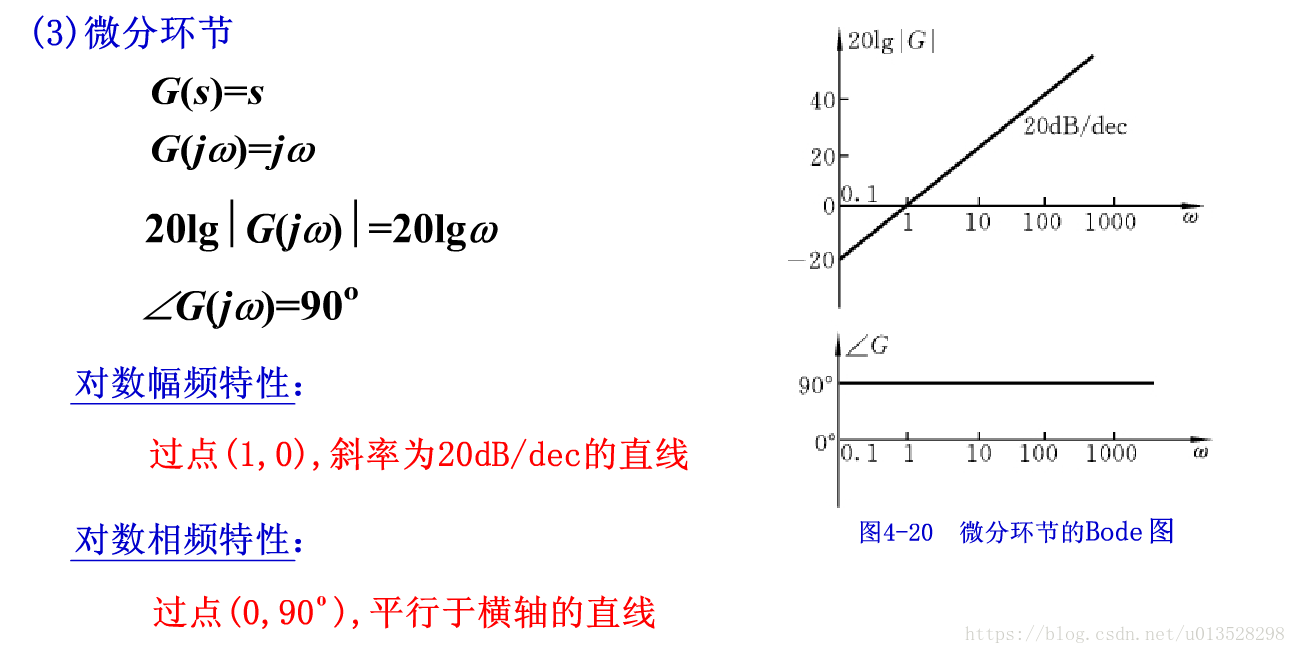
2.1比例环节、积分环节、微分环节的Bode图分析
2.2积分环节为什么能消除误差
积分能消除静差是针对输入信号(且系统是线性系统)而言,因为稳态误差与系统开环前向通道积分环节个数有关(即有几个积分环节),比如有一个积分环节此系统称为一型系统,该系统对于阶跃输入而言稳态误差为零(所以称之为能消除静差),而对于斜坡输入其静差为一有限值(此时就不能消除静差),具体的公式推导可参考《机械工程控制基础》时域分析稳态误差部分。
1.PID基本原理
2.原理分析
2.1比例环节、积分环节、微分环节的Bode图分析
2.2积分环节为什么能消除误差
积分能消除静差是针对输入信号(且系统是线性系统)而言,因为稳态误差与系统开环前向通道积分环节个数有关(即有几个积分环节),比如有一个积分环节此系统称为一型系统,该系统对于阶跃输入而言稳态误差为零(所以称之为能消除静差),而对于斜坡输入其静差为一有限值(此时就不能消除静差),具体的公式推导可参考《机械工程控制基础》时域分析稳态误差部分。

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





















 2万+
2万+





