




 本文详细介绍了如何在视觉SLAM开发中使用CMake进行项目管理和库文件链接。从简单的CMakeLists.txt配置开始,讨论了库的生成过程,并列举了多个常用库如Eigen、Sophus、OpenCV、PCL和Ceres的CMake集成方法。
本文详细介绍了如何在视觉SLAM开发中使用CMake进行项目管理和库文件链接。从简单的CMakeLists.txt配置开始,讨论了库的生成过程,并列举了多个常用库如Eigen、Sophus、OpenCV、PCL和Ceres的CMake集成方法。
1、简单的cmake 使用
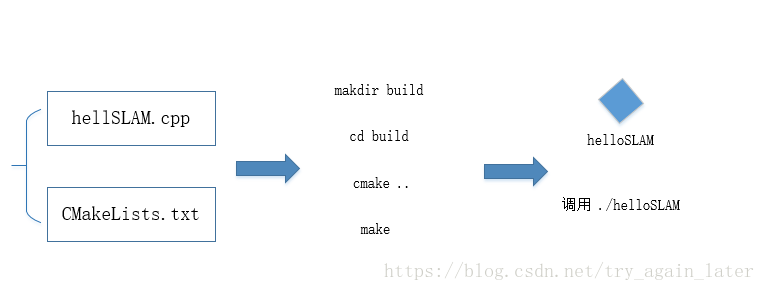
CMakeLists.txt文件告诉cmake我们要对这个目录下的文件做什么事情。
# 声明要求的 cmake 最低版本
cmake_minimum_required( VERSION 2.8 )
# 声明一个 cmake 工程
project( HelloSLAM )
# 添加一个可执行程序
# 语法:add_executable( 程序名 源代码文件 )
add_executable( helloSLAM helloSLAM.cpp )
2、使用库
程序由源文件和头文件组成。
可执行程序想调用库函数中的函数,需要在CMakeLists.txt中把可执行程序链接到库文件中
# 将库文件链接到可执行程序上
target_link_libraries( useHello hello_shared )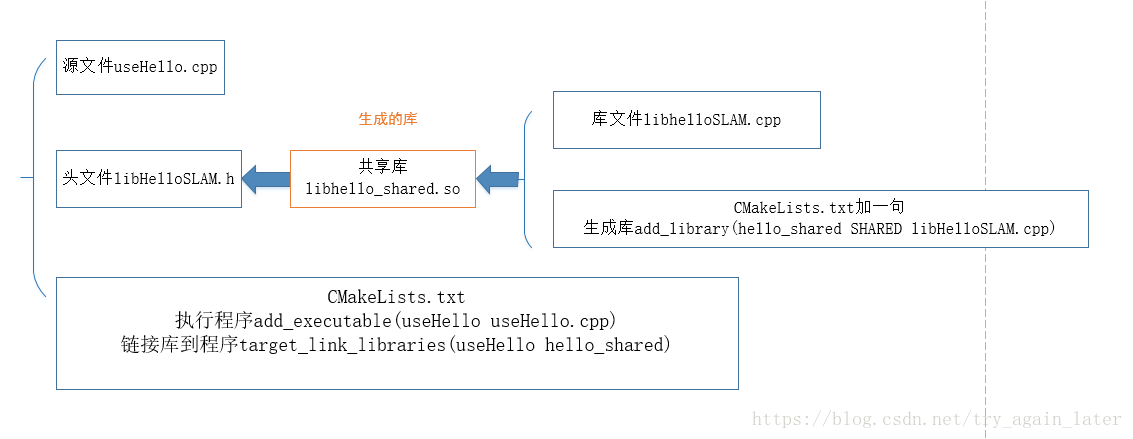
1、源文件useHello.cpp
//头文件
#include "libHelloSLAM.h"
int main( int argc, char** argv )
{
// 使用头文件中的 printHello() 函数
printHello();
retur 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1537
1537

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









