




 本文详细解析LOAM(Lidar Odometry and Mapping)中transformMaintenance部分,主要关注两个关键回调函数laserOdometryHandler和odomAftMappedHandler。前者处理激光雷达里程计信息,将位姿转换到世界坐标系;后者负责融合不同频率的里程计和地图优化位姿,确保TransformMaintenance的发布频率与laserOdometry一致。
本文详细解析LOAM(Lidar Odometry and Mapping)中transformMaintenance部分,主要关注两个关键回调函数laserOdometryHandler和odomAftMappedHandler。前者处理激光雷达里程计信息,将位姿转换到世界坐标系;后者负责融合不同频率的里程计和地图优化位姿,确保TransformMaintenance的发布频率与laserOdometry一致。
这一部分主要为了:融合后的Lidar轨迹(里程计位姿+地图优化的位姿)
main函数
订阅的两个消息节点:
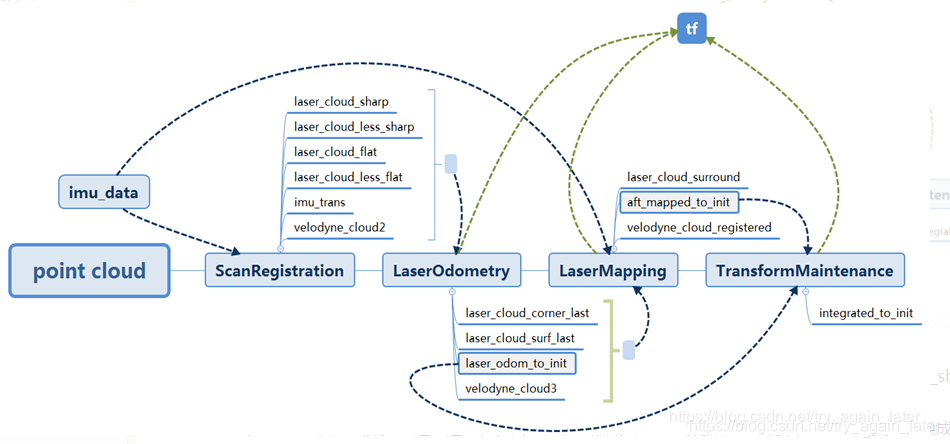
1、laserOdometry节点发布的/laser_odom_to_init消息(Lidar里程计估计位姿到初始坐标系的变换)
2、laserMapping节点发布的/aft_mapped_to_init消息(laserMapping节点优化后的位姿到初始坐标系的变换)
发布的节点:发布/integrated_to_init消息。
int main(int argc, char** argv)
{
ros::init(argc, argv, "transformMaintenance");
ros::NodeHandle nh;
// 订阅两个节点
ros::Subscriber subLaserOdometry = nh.subscribe<nav_msgs::Odometry>
("/laser_odom_to_init", 5, laserOdometryHandler);
ros::Subscriber subOdomAftMapped = nh.subscribe<nav_msgs::Odometry>
("/aft_mapped_to_init", 5, odomAftMappedHandler);
// 发布一个节点
ros::Publisher pubLaserOdometry2 = nh.advertise<nav_msgs::Odometry> ("/integrated_to_init", 5);
pubLaserOdometry2Pointer = &pubLaserOdometry2;
laserOdometry2.header.frame_id = "/camera_init";
laserOdometry2.child_frame_id = "/camera";
tf::TransformBroadcaster tfBroadcaster2;
tfBroadcaster2Pointer = &tfBroadcaster2;
laserOdometryTrans2.frame_id_ = "/camera_init";
laserOdometryTrans2.child_frame_id_ = "/camera";
ros::spin();
return 0;
}
接下来主要介绍两个回调函数。
先从重要参数开始:
//odometry计算的转移矩阵(实时高频量)
float transformSum[6] = {
0} 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1127
1127

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









