







一. 问题构建:
在minimum_snap的基础上,飞行走廊考虑了环境中的障碍物约束问题,在将可通行区域限制为走廊环境后,为原本的轨迹优化问题增加了不等式约束,同时取消了原来优化后的轨迹必须经过路径中间的n-2个waypoint的约束限制,使得生成的轨迹和时间分配可以更自由,下面来看一下新的问题的表达形式:
(1) 问题定义形式:
飞行走廊约束下的minimum_snap问题经过转化之后将会变成了一个具有不等式约束的QP问题,问题的表达形式为:
对比一下无约束时候的minimum_snap问题的表达形式,
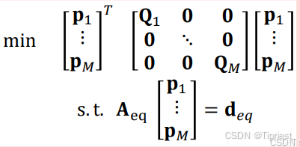
可以发现在飞行走廊情况下问题的定义形式主要出现了以下区别:
a. 原来的多项式系数 变成了替换为了贝塞尔曲线的控制点
。
b. 新增了不等式约束。
同时,通过对于飞行走廊概念的理解可以发现有如下的区别:
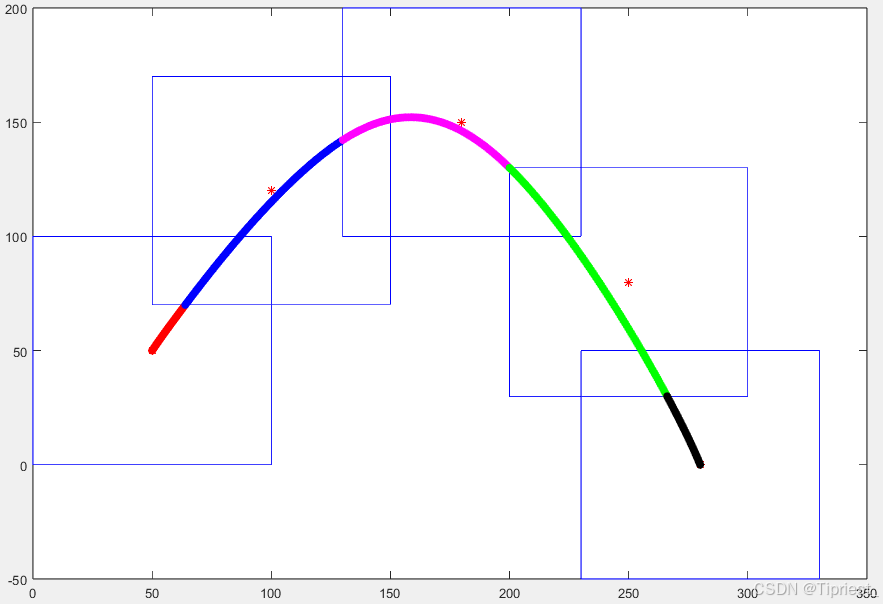
c. 对于给定的n个控制点waypoint,ch5的轨迹优化会有n-1段轨迹,是每个控制点之间的轨迹,但是飞行走廊具有n段轨迹(如上图中的5段轨迹所示)。
(2) 贝塞尔曲线性质
出于贝塞尔曲线的以下四个优秀性质,在飞行走廊进行轨迹生成的时候,使用了Bernstein基底的贝塞尔曲线,贝塞尔曲线的定义式如下
贝塞尔曲线主要具有以下的四个性质:
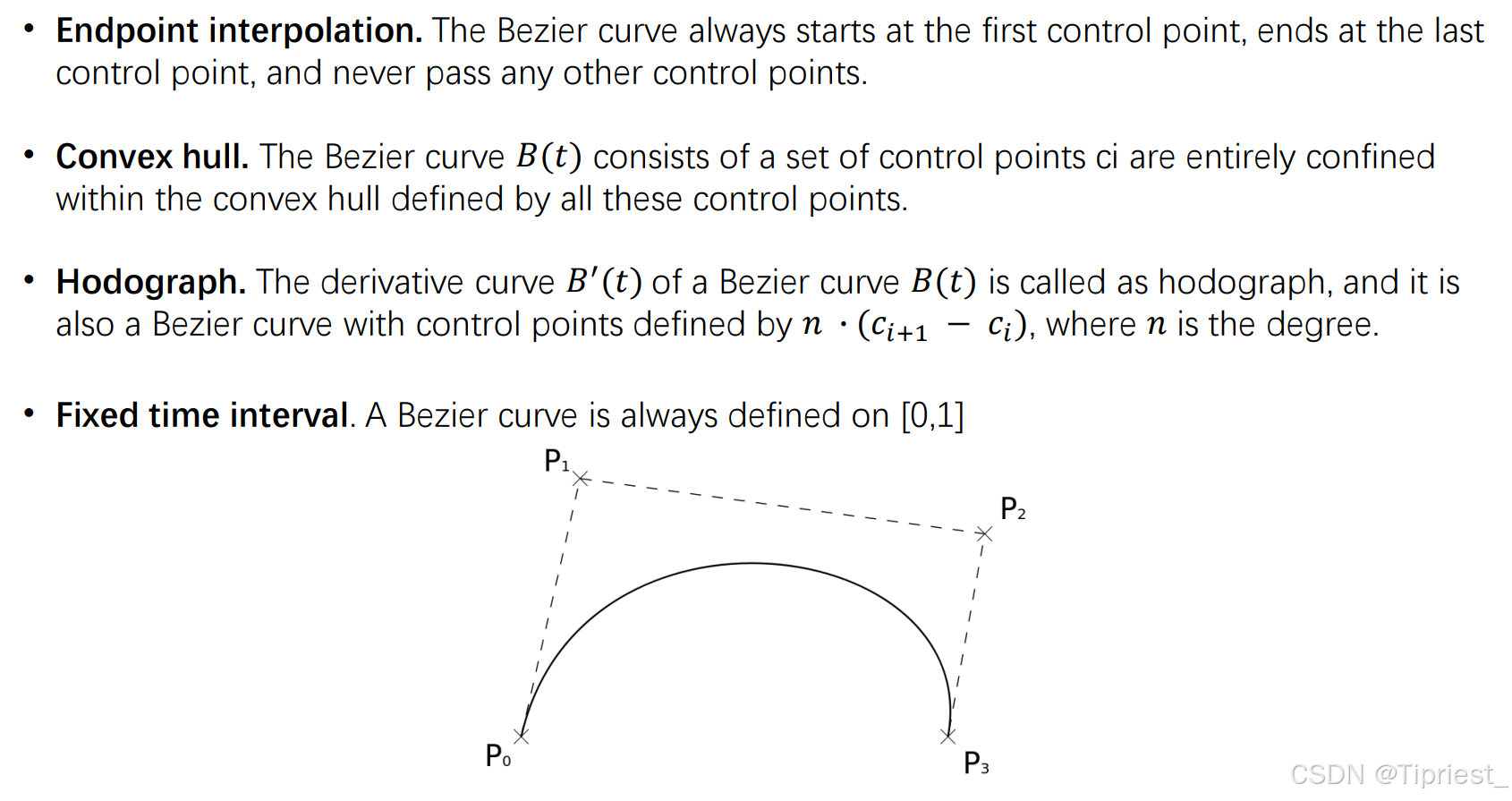
第一点:贝塞尔曲线一定经过控制该段贝塞尔曲线生成的第一个和第n+1个控制点,并且一定不经过其他控制带你,n为生成的贝塞尔曲线的阶数,上述贝塞尔曲线的定义式中的 为贝塞尔曲线的控制点。
第二点:控制点若构成一个凸包区域,则由这些控制点生成的贝塞尔曲线一定在这些凸包区域内。
第三点:贝塞尔曲线具有Hodo性质,贝塞尔曲线的导数的控制点由贝塞尔曲线的控制点决定。
第四点:一段贝塞尔曲线的时间长度必须为[0, 1]。
知道了贝塞尔曲线的控制点,就可以通过Bernstein基底获得对应的多项式表达式,也可以直接预先计算好,知道贝塞尔曲线的控制点,可以根据如下的变换矩阵得到多项式表达式的各个系数:
![]()
例如,当阶次为6阶时,多项式的各个系数为:
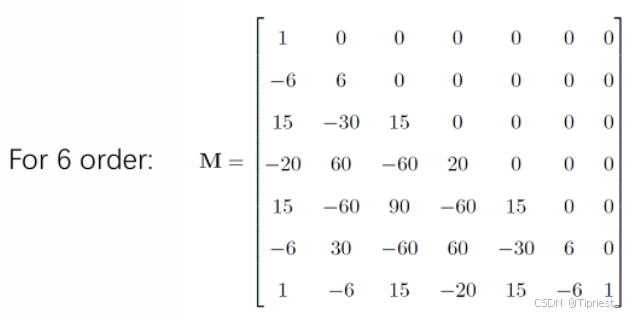
所以理论上,现在我们已经可以得到新的能量函数Q为
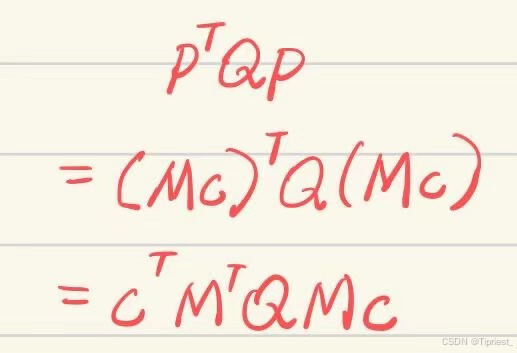
但是,由于贝塞尔曲线性质4的存在,事情并没有这么简单,我们还需要引入一个时间缩放因子s。
(3) 能量函数Q0:
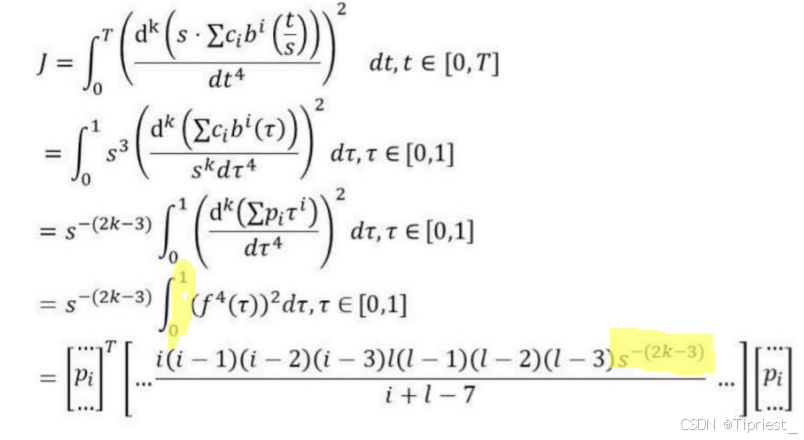
通过对minimum_snap的重新推导发现,时间归一到[0,1]进行缩放之后,原来的T(k)项现在变成1不需要考虑,多出来了s的时间缩放项进行处理。因此再计算Q的每一个值的时候,最终每一项需要乘上s^-(2k-3),
我们用Q0矩阵代表考虑了时间缩放因子和M变换矩阵之后的Q矩阵,对给定的5阶,四个点的情况求其矩阵,因为
,首先求Q矩阵为
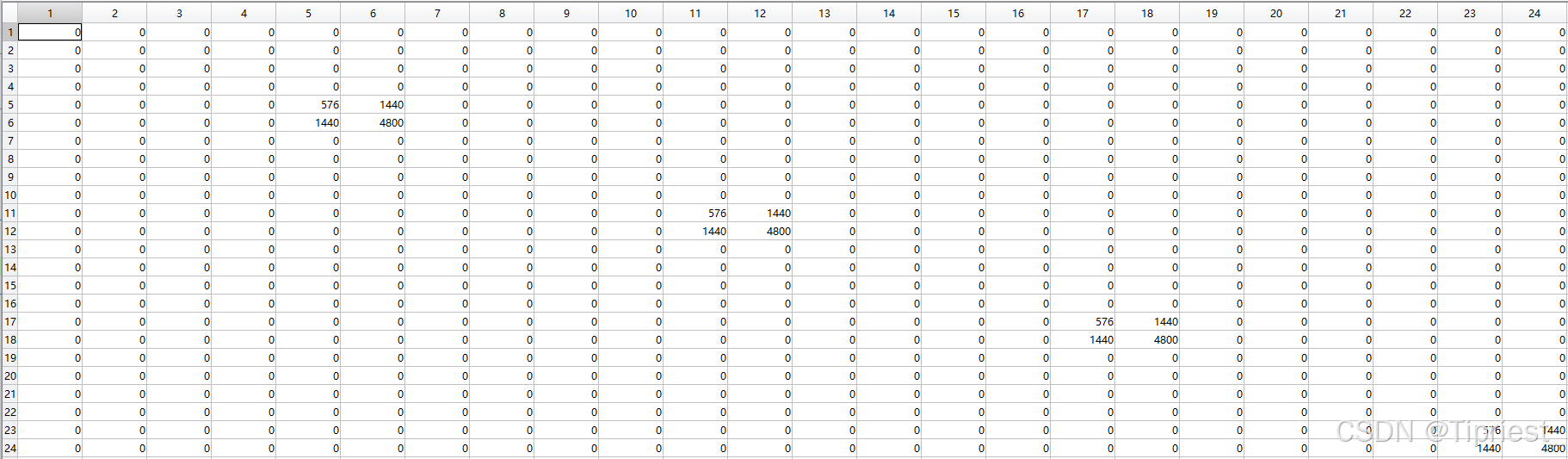
矩阵为:
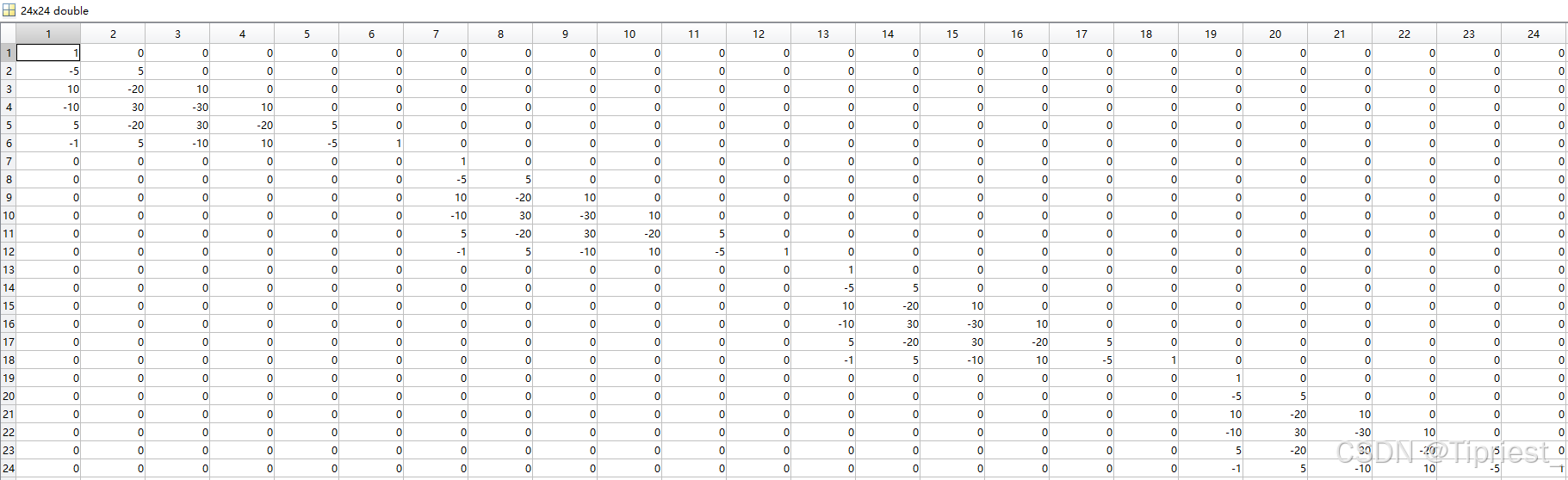
矩阵为:
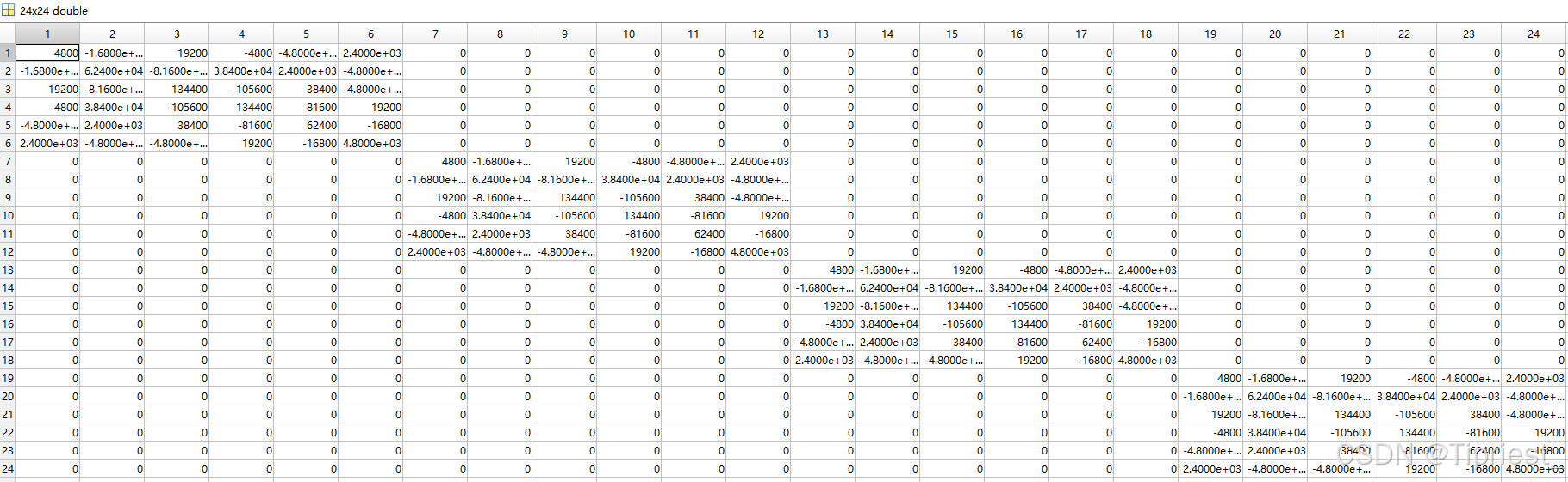
这里有一个地方要注意一下,目前的假设条件并不能保证一定为正定的,因此使用matlab函数
![]()
获得与最接近的正定矩阵。
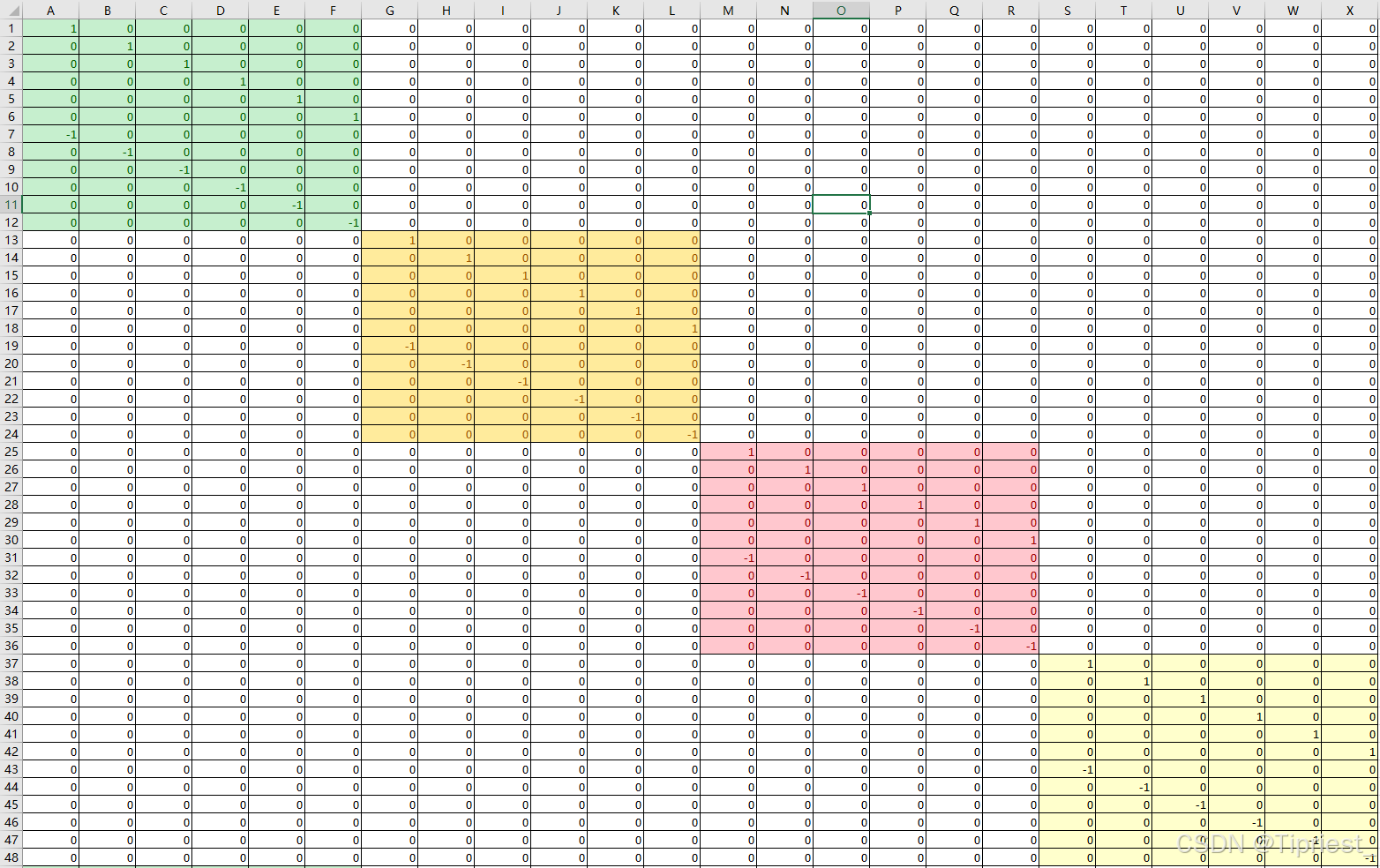
(4) 约束项1 
根据贝塞尔曲线的性质,仍然应该有整条轨迹的起点和终点的位置及各阶导数满足约束条件,每两段轨迹之间的连续性约束也仍然需要满足,相比于ch5只是少了每个轨迹中间点之间的位置约束,最终得到的与
分别为:

(5) 约束项2 
对于n个waypoint,飞行走廊会有n段轨迹,每一段会有(n_order+1)个控制点,每一段的控制点都应该在这一段的飞行走廊的矩形凸包内部,下一段的控制点都应该在下一个飞行走廊的矩形凸包内部,由于连续性约束,上一段的最后一个控制点和下一段的第一个控制点是一个控制点,所以隐性地有:两端轨迹之间的交点处于两段轨迹所在的矩形凸包相交的区域内,因此在位置上需要施加的约束共有n*(n_order+1)个
对于速度项,就像是多项式在求导后会降一阶一样,每一段轨迹的速度会有n_order个控制点,因此在速度上需要施加的约束共有n*(n_order)个
同理,在加速度上需要施加的约束共有n*(n_order-1)个
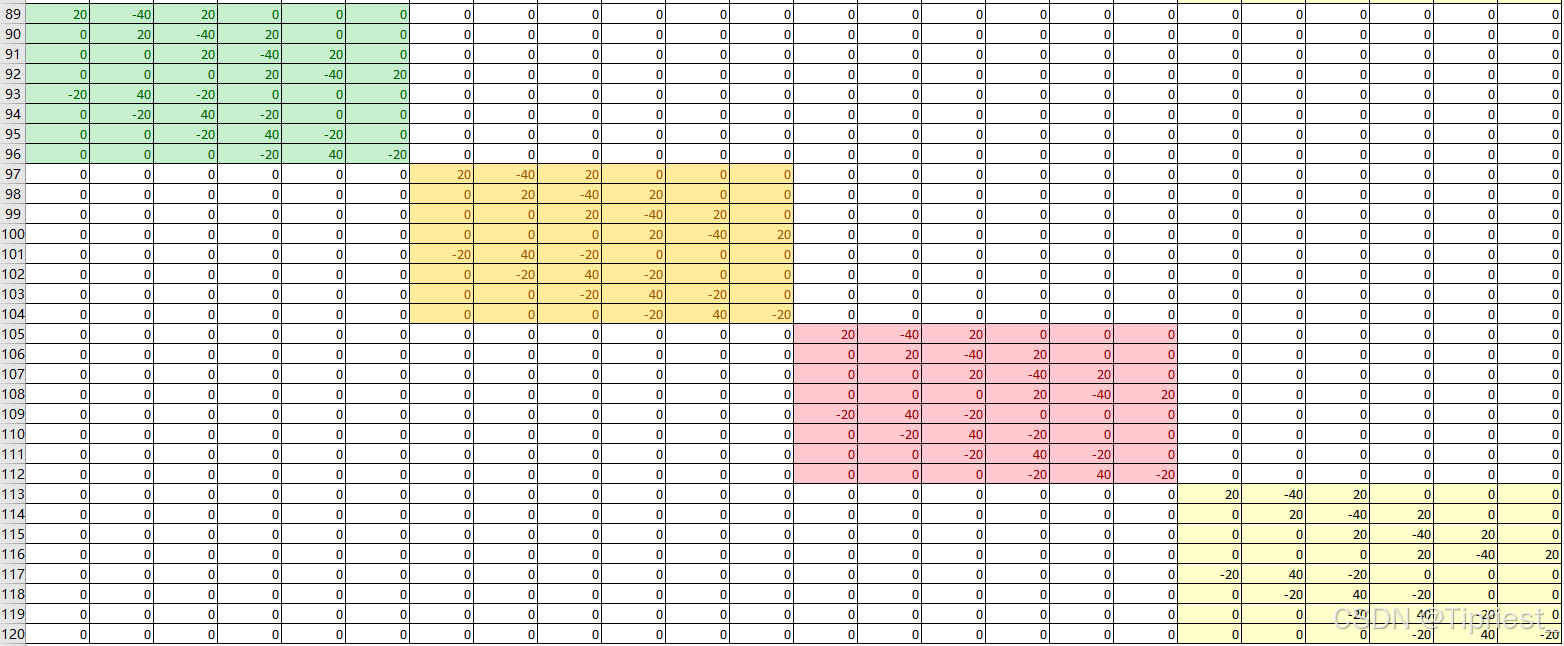
但是,上面提到的施加约束的是一个大于和一个小于约束,所以将大于约束转换为小于约束之后,最后的约束还要整体乘以二,
因此,对于给定的5阶,四个点的情况共有120个约束需要满足
a. 需要满足的最大最小位置约束
b. 需要满足的最大最小速度约束
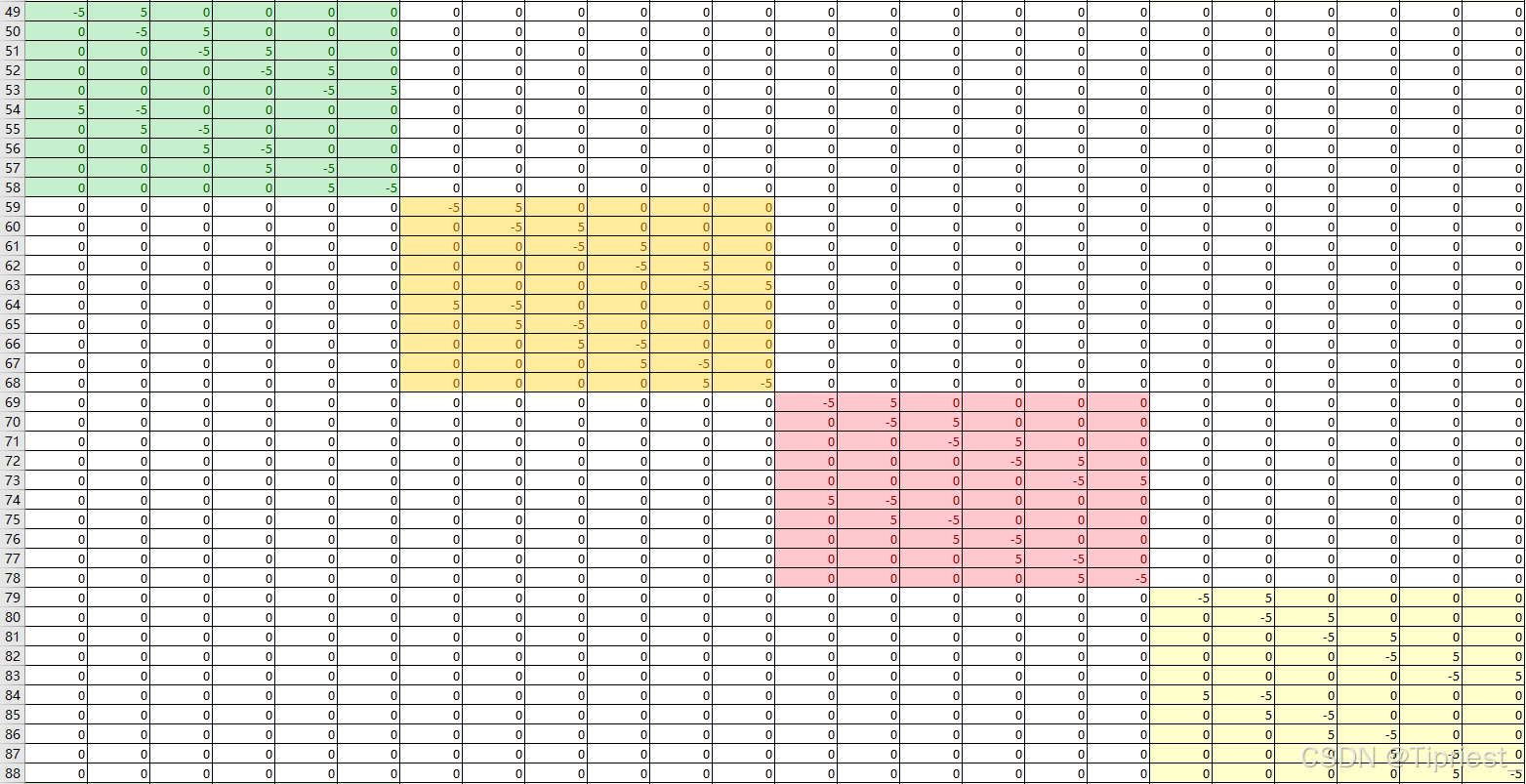
c. 需要满足的最大最小加速度约束
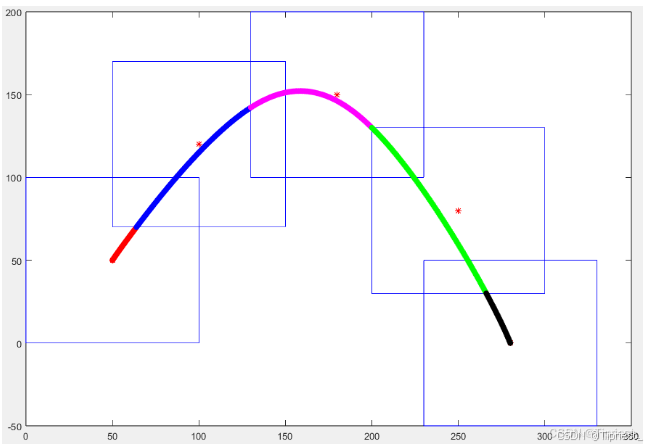
(6) 求解
在获得了等式和不等式约束矩阵之后,使用Matlab的quadprog求解器尽心求解:
![]()
(7) 代码
(8) ROS实现:
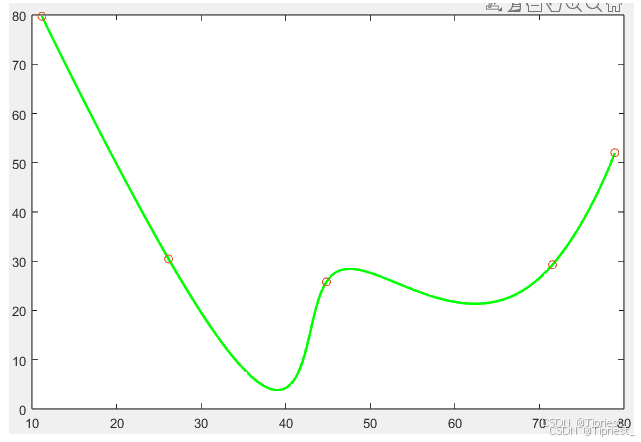
使用高飞老师在2018年的ICRA实现的飞行走廊效果如下图所示:


















 7491
7491

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









