



由于赵虚左没有更新后续内容,从这章开始将转入小鱼的教程
视频
docs
GIthub 仓库
URDF语法和ROS相同
6.2 新建 URDF 功能包
ros2 pkg create fishbot_description --build-type ament_cmake --license Apache-2.0
功能包不需要任何依赖
--license Apache-2.0表明使用的证书是Apache 2.0
urdf 如下
<?xml version="1.0"?>
<robot name="first_robot">
<link name="base_link">
<visual>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/>
<geometry>
<cylinder radius="0.10" length="0.12"/>
</geometry>
<material name="white">
<color rgba="1.0 1.0 1.0 0.5"/>
</material>
</visual>
</link>
<link name="imu_link">
<visual>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/>
<geometry>
<box size="0.02 0.02 0.02"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5"/>
</material>
</visual>
</link>
<joint name="imu_joint" type="fixed">
<parent link="base_link"/>
<child link="imu_link"/>
<origin xyz="0.0 0.0 0.03" rpy="0.0 0.0 0.0"/>
</joint>
</robot>
可以使用urdf_to_graphviz first_robot.urdf将 urdf 坐标关系用 PDF 查看
6.2.2 在 RVIZ 中显示机器人
安装包
sudo apt install ros-$ROS_DISTRD-joint-state-publisher
sudo apt install ros-$ROS_DISTRO-robot-state-publisher
公布包下新建 launch 目录,编写 python launch 文件
import launch
import launch_ros
from ament_index_python.packages import get_package_share_directory
def generate_launch_description():
# 获取默认的 urdf 路径
return launch.LaunchDescription([
])
配置 Cmake
install(DIRECTORY launch urdf
DESTINATION share/${PROJECT_NAME}
)
全 Cmake
cmake_minimum_required(VERSION 3.8)
project(fishbot_description)
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
# find dependencies
find_package(ament_cmake REQUIRED)
# uncomment the following section in order to fill in
# further dependencies manually.
# find_package(<dependency> REQUIRED)
if(BUILD_TESTING)
find_package(ament_lint_auto REQUIRED)
# the following line skips the linter which checks for copyrights
# comment the line when a copyright and license is added to all source files
set(ament_cmake_copyright_FOUND TRUE)
# the following line skips cpplint (only works in a git repo)
# comment the line when this package is in a git repo and when
# a copyright and license is added to all source files
set(ament_cmake_cpplint_FOUND TRUE)
ament_lint_auto_find_test_dependencies()
endif()
install(DIRECTORY launch urdf
DESTINATION share/${PROJECT_NAME}
)
ament_package()
编译
完整 launch 文件
import launch
import launch_ros
from ament_index_python.packages import get_package_share_directory
import os
import launch_ros.parameter_descriptions
def generate_launch_description():
# 获取默认的 urdf 路径
urdf_package_path = get_package_share_directory('fishbot_description')
default_urdf_path = os.path.join(urdf_package_path,'urdf','first_robot.urdf')
default_rviz_config_path = os.path.join(urdf_package_path,'config','display_robot_model.rviz')
# 声明一个 urdf 目录的参数,方便修改
action_declare_arg_mode_path = launch.actions.DeclareLaunchArgument(
name="model",default_value=str(default_urdf_path),description='加载的模型文件路经'
)
# 通过文件路径,获取内容,并转换成参数值对象,以供传入 robot_state_publisher
substitutions_commend_result = launch.substitutions.Command(['cat ',launch.
substitutions.LaunchConfiguration('model')])
robot_description_value = launch_ros.parameter_descriptions.ParameterValue(substitutions_commend_result,
value_type=str)
action_robot_state_publisher = launch_ros.actions.Node(
package='robot_state_publisher',
executable='robot_state_publisher',
parameters=[{'robot_description':robot_description_value}]
)
action_joint_state_publisher = launch_ros.actions.Node(
package='joint_state_publisher',
executable='joint_state_publisher'
)
action_rviz_node = launch_ros.actions.Node(
package='rviz2',
executable='rviz2',
arguments=['-d',default_rviz_config_path]
)
return launch.LaunchDescription([
action_declare_arg_mode_path,
action_robot_state_publisher,
action_joint_state_publisher,
action_rviz_node
])
Cmake 修改
install(DIRECTORY launch urdf config
DESTINATION share/${PROJECT_NAME}
)
6.2.3 xacro 简化 urdf
新建 .xacro 文件
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="first_robot">
<xacro:macro name="base_link" params="length radius">
<link name="base_link">
<visual>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/>
<geometry>
<cylinder radius="${radius}" length="${length}"/>
</geometry>
<material name="white">
<color rgba="1.0 1.0 1.0 0.5"/>
</material>
</visual>
</link>
</xacro:macro>
<xacro:macro name="imu_link" params="imu_name xyz">
<link name="${imu_name}_link">
<visual>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/>
<geometry>
<box size="0.02 0.02 0.02"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5"/>
</material>
</visual>
</link>
<joint name="${imu_name}_joint" type="fixed">
<parent link="base_link"/>
<child link="${imu_name}_link"/>
<origin xyz="${xyz}" rpy="0.0 0.0 0.0"/>
</joint>
</xacro:macro>
<xacro:base_link length="0.12" radius="0.1"/>
<xacro:imu_link imu_name="imu_up" xyz="0.0 0.0 0.03"/>
<xacro:imu_link imu_name="imu_down" xyz="0.0 0.0 -0.03"/>
</robot>
安装软件包
sudo apt install ros-$ROS_DISTRO-xacro
使用 xacro 可以将 xacro 转换为 urdf 输出(有错误会报错)
xacro /home/herrscher/chapt6/chapt6_ws/src/fishbot_description/urdf/first_robot.xacro
launch.py 改动
# 通过文件路径,获取内容,并转换成参数值对象,以供传入 robot_state_publisher
substitutions_commend_result = launch.substitutions.Command(['xacro ',launch.
substitutions.LaunchConfiguration('model')])
robot_description_value = launch_ros.parameter_descriptions.ParameterValue(substitutions_commend_result,
value_type=str)
启动
ros2 launch fishbot_description display_robot.launch.py model:=/home/herrscher/chapt6/chapt6_ws/src/fishbot_description/urdf/first_robot.xacro
机器人构建
框架如下
caster
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:macro name="caster_xacro" params="caster_name xyz">
<link name="${caster_name}_link">
<visual>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/>
<geometry>
<sphere radius="0.016"/>
</geometry>
<material name="yellow">
<color rgba="1.0 1.0 0.0 0.8"/>
</material>
</visual>
</link>
<joint name="${caster_name}_joint" type="fixed">
<parent link="base_link"/>
<child link="${caster_name}_link"/>
<origin xyz="${xyz}" rpy="0.0 0.0 0.0"/>
</joint>
</xacro:macro>
</robot>
whell
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:macro name="wheel_xacro" params="wheel_name xyz">
<link name="${wheel_name}_link">
<visual>
<origin xyz="0.0 0.0 0.0" rpy="1.57079 0.0 0.0"/>
<geometry>
<cylinder radius="0.0325" length="0.04"/>
</geometry>
<material name="yellow">
<color rgba="1.0 1.0 0.0 0.8"/>
</material>
</visual>
</link>
<joint name="${wheel_name}_joint" type="continuous">
<parent link="base_link"/>
<child link="${wheel_name}_link"/>
<origin xyz="${xyz}" rpy="0.0 0.0 0.0"/>
<axis xyz="0.0 1.0 0.0"/>
</joint>
</xacro:macro>
</robot>
carema
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:macro name="carema_xacro" params="xyz">
<link name="carema_link">
<visual>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/>
<geometry>
<box size="0.02 0.10 0.02"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5"/>
</material>
</visual>
</link>
<joint name="carema_joint" type="fixed">
<parent link="base_link"/>
<child link="carema_link"/>
<origin xyz="${xyz}" rpy="0.0 0.0 0.0"/>
</joint>
</xacro:macro>
</robot>
imu
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:macro name="imu_xacro" params="xyz">
<link name="imu_link">
<visual>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/>
<geometry>
<box size="0.02 0.02 0.02"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5"/>
</material>
</visual>
</link>
<joint name="imu_joint" type="fixed">
<parent link="base_link"/>
<child link="imu_link"/>
<origin xyz="${xyz}" rpy="0.0 0.0 0.0"/>
</joint>
</xacro:macro>
</robot>
laser
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:macro name="laser_xacro" params="xyz">
<!-- 雷达支撑杆 -->
<link name="laser_cylinder_link">
<visual>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/>
<geometry>
<cylinder radius="0.01" length="0.10"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 1.0"/>
</material>
</visual>
</link>
<link name="laser_link">
<visual>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/>
<geometry>
<cylinder radius="0.02" length="0.02"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 1.0"/>
</material>
</visual>
</link>
<joint name="laser_joint" type="fixed">
<parent link="laser_cylinder_link"/>
<child link="laser_link"/>
<origin xyz="0.0 0.0 0.05" rpy="0.0 0.0 0.0"/>
</joint>
<joint name="laser_cylinder_joint" type="fixed">
<parent link="base_link"/>
<child link="laser_cylinder_link"/>
<origin xyz="${xyz}" rpy="0.0 0.0 0.0"/>
</joint>
</xacro:macro>
</robot>
base
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:macro name="base_xacro" params="length radius">
<link name="base_link">
<visual>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/>
<geometry>
<cylinder radius="${radius}" length="${length}"/>
</geometry>
<material name="white">
<color rgba="1.0 1.0 1.0 0.5"/>
</material>
</visual>
</link>
</xacro:macro>
</robot>
fishbot
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="fishbot">
<!-- 基础部分 base_link -->
<xacro:include filename="$(find fishbot_description)/urdf/fishbot/base.urdf.xacro"/>
<!-- 传感器部分 -->
<xacro:include filename="$(find fishbot_description)/urdf/fishbot/sensor/imu.urdf.xacro"/>
<xacro:include filename="$(find fishbot_description)/urdf/fishbot/sensor/carema.urdf.xacro"/>
<xacro:include filename="$(find fishbot_description)/urdf/fishbot/sensor/laser.urdf.xacro"/>
<!-- 执行器部分 -->
<xacro:include filename="$(find fishbot_description)/urdf/fishbot/actuator/wheel.urdf.xacro"/>
<xacro:include filename="$(find fishbot_description)/urdf/fishbot/actuator/caster.urdf.xacro"/>
<xacro:base_xacro length="0.12" radius="0.10" />
<xacro:imu_xacro xyz="0.0 0.0 0.02" />
<xacro:carema_xacro xyz="0.10 0.0 0.075" />
<xacro:laser_xacro xyz="0.0 0.0 0.10" />
<xacro:wheel_xacro wheel_name="left_wheel" xyz="0 0.10 -0.06" />
<xacro:wheel_xacro wheel_name="right_wheel" xyz="0 -0.10 -0.06" />
<xacro:caster_xacro caster_name="front_wheel" xyz="0.08 0.0 -0.076" />
<xacro:caster_xacro caster_name="back_wheel" xyz="-0.08 0.0 -0.076" />
</robot>
6.2.6 贴合地面,添加虚拟部件
为机器人添加 base_footprint
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:macro name="base_xacro" params="length radius">
<link name="base_footprint" />
<link name="base_link">
<visual>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/>
<geometry>
<cylinder radius="${radius}" length="${length}"/>
</geometry>
<material name="white">
<color rgba="1.0 1.0 1.0 0.5"/>
</material>
</visual>
</link>
<joint name="joint_name" type="fixed">
<origin xyz="0.0 0.0 ${length/2.0 + 0.0325 - 0.001}" rpy="0.0 0.0 0.0"/>
<parent link="base_footprint"/>
<child link="base_link"/>
</joint>
</xacro:macro>
</robot>
6.3 机器人的物理属性
6.3.1 为机器人添加碰撞属性
在机器人模型下方添加collision标签,内容可以和visual标签保持一致
<link name="base_link">
<visual>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/>
<geometry>
<cylinder radius="${radius}" length="${length}"/>
</geometry>
<material name="white">
<color rgba="1.0 1.0 1.0 0.5"/>
</material>
</visual>
<collision>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/>
<geometry>
<cylinder radius="${radius}" length="${length}"/>
</geometry>
<material name="white">
<color rgba="1.0 1.0 1.0 0.5"/>
</material>
</collision>

可以将 rviz2 的标签修改为 collision 可见验证
6.3.2 为机器人部件添加质量和惯性
惯性矩阵
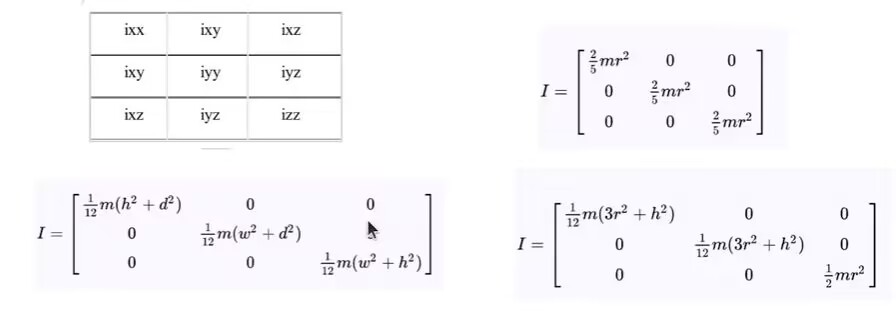
添加惯性宏文件
<?xml version="1.0"?>
<robot xmlns:xacro="http://ros.org/wiki/xacro">
<xacro:macro name="box_inertia" params="m l w h">
<inertial>
<mass value="${m}" />
<inertia ixx="${m*(h*h + l*l)/12}" ixy="0" ixz="0" iyy="${m*(w*w + l*l)/12}" iyz="0" izz="${m*(w*w + h*h)/12}" />
</inertial>
</xacro:macro>
<xacro:macro name="cylinder_inertia" params="m r h">
<inertial>
<mass value="${m}" />
<inertia ixx="${m*(3*r*r+h*h)/12}" ixy="0" ixz="0" iyy="${m*(3*r*r+h*h)/12}" iyz="0" izz="${m*r*r/2}" />
</inertial>
</xacro:macro>
<xacro:macro name="sphere_inertia" params="m r">
<inertial>
<mass value="${m}" />
<inertia ixx="${2*m*r*r/5}" ixy="0" ixz="0" iyy="${2*m*r*r/5}" iyz="0" izz="${2*m*r*r/5}" />
</inertial>
</xacro:macro>
</robot>
为机器人添加宏
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:include filename="$(find fishbot_description)/urdf/fishbot/common_inertial.xacro"/>
<xacro:macro name="base_xacro" params="length radius">
<link name="base_footprint" />
<link name="base_link">
<visual>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/>
<geometry>
<cylinder radius="${radius}" length="${length}"/>
</geometry>
<material name="white">
<color rgba="1.0 1.0 1.0 0.5"/>
</material>
</visual>
<collision>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/>
<geometry>
<cylinder radius="${radius}" length="${length}"/>
</geometry>
<material name="white">
<color rgba="1.0 1.0 1.0 0.5"/>
</material>
</collision>
<xacro:cylinder_inertia m="1.0" r="${radius}" h="${length}" />
</link>
<joint name="joint_name" type="fixed">
<origin xyz="0.0 0.0 ${length/2.0 + 0.0325 - 0.001}" rpy="0.0 0.0 0.0"/>
<parent link="base_footprint"/>
<child link="base_link"/>
</joint>
</xacro:macro>
</robot>
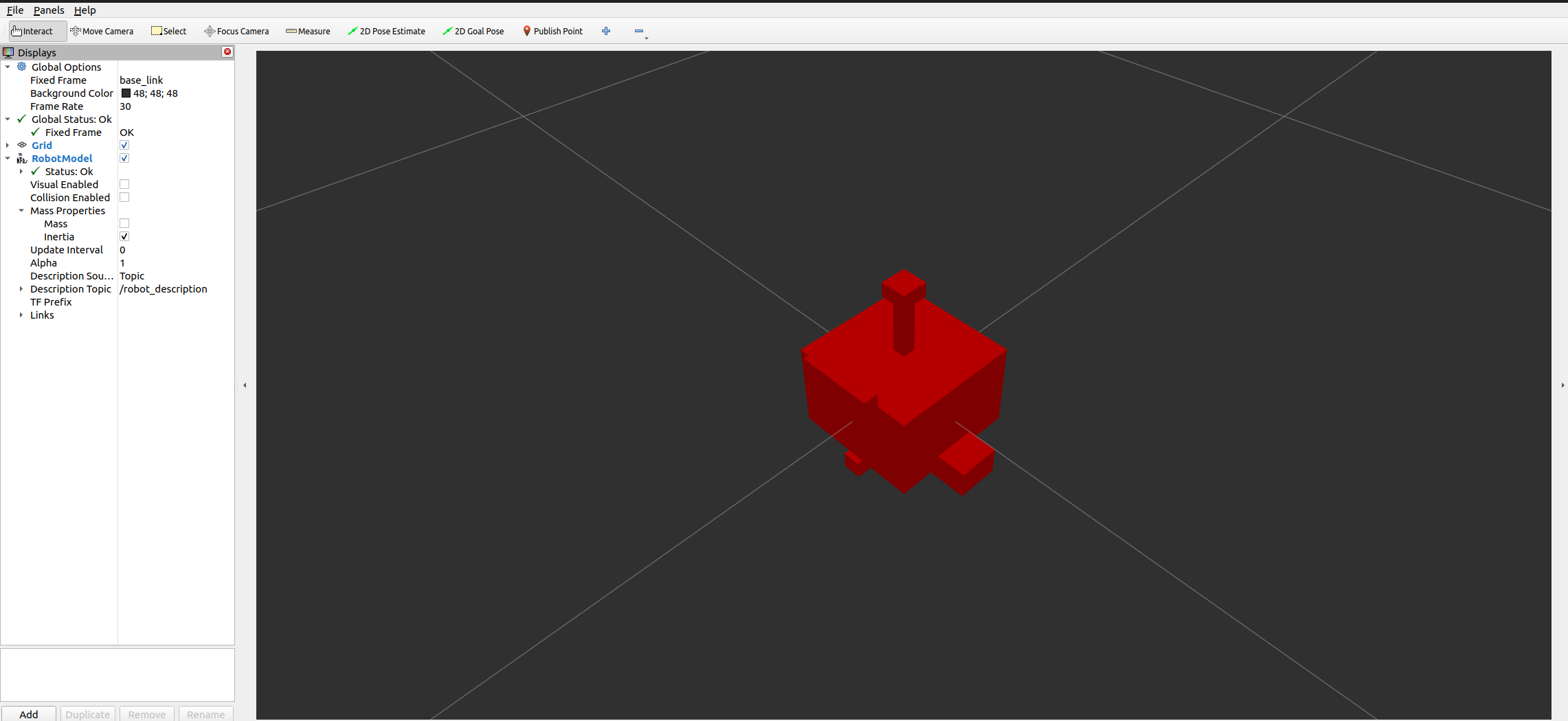
全部添加完成后,可以启动查看质量和惯性

6.4 Gazebo 机器人仿真
gazebo 安装
sudo apt install gazebo
mkdir -p ~/.gazebo
cd ~/.gazebo
git clone https://gitee.com/ohhuo/gazebo_models.git
修改文件夹名 gazebo_models 为 models
sudo rm -rf ~/.gazebo/models/.git
sudo apt install ros-$ROS_DISTRO-gazebo-ros-pkgs
可以启动 gazebo 验证
gazebo
6.4.2 gazebo 中加载机器人模型
import launch
import launch.launch_description_sources
import launch_ros
from ament_index_python.packages import get_package_share_directory
import os
import launch_ros.parameter_descriptions
def generate_launch_description():
# 获取功能包的 share 路径
urdf_package_path = get_package_share_directory('fishbot_description')
default_xacro_path = os.path.join(urdf_package_path,'urdf','fishbot/fishbot.urdf.xacro')
# default_rviz_config_path = os.path.join(urdf_package_path,'config','display_robot_model.rviz')
default_gazebo_world_path = os.path.join(urdf_package_path,'world','custor_room.world')
# 声明一个 urdf 目录的参数,方便修改
action_declare_arg_mode_path = launch.actions.DeclareLaunchArgument(
name="model",default_value=str(default_xacro_path),description='加载的模型文件路经'
)
# 通过文件路径,获取内容,并转换成参数值对象,以供传入 robot_state_publisher
substitutions_commend_result = launch.substitutions.Command(['xacro ',launch.
substitutions.LaunchConfiguration('model')])
robot_description_value = launch_ros.parameter_descriptions.ParameterValue(substitutions_commend_result,
value_type=str)
action_robot_state_publisher = launch_ros.actions.Node(
package='robot_state_publisher',
executable='robot_state_publisher',
parameters=[{'robot_description':robot_description_value}]
)
action_launch_gazebo = launch.actions.IncludeLaunchDescription(
launch.launch_description_sources.PythonLaunchDescriptionSource(
[get_package_share_directory('gazebo_ros'),'/launch','/gazebo.launch.py']
),
launch_arguments=[('world',default_gazebo_world_path),('verbose','true')]
)
action_spawn_entity = launch_ros.actions.Node(
package='gazebo_ros',
executable='spawn_entity.py',
arguments=['-topic','/robot_description','-entity','fishbot']
)
return launch.LaunchDescription([
action_declare_arg_mode_path,
action_robot_state_publisher,
action_launch_gazebo,
action_spawn_entity
])
这里因为某些标签没有转换,加载出来是白膜
6.4.3 用 gazebo 标签拓展 URDF
颜色拓展
<gazebo reference="laser_cylinder_link" >
<material>Gazebo/Black</material>
</gazebo>
<gazebo reference="laser_link" >
<material>Gazebo/Black</material>
</gazebo>
摩擦力
<gazebo reference="${wheel_name}_link">
<mu1 value="20.0"/>
<mu2 value="20.0"/>
<kp value="1000000000.0"/>
<kd value="1.0"/>
</gazebo>
--------
<gazebo reference="${wheel_name}_link">
<mu1 value="0.0"/>
<mu2 value="0.0"/>
<kp value="1000000000.0"/>
<kd value="1.0"/>
</gazebo>
6.4.4 使用两轮差速插件控制机器人运动
fishbot 下新建 plugins 文件夹,新建 gazebo_control_plugin.xacro
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:macro name="gazebo_control_plugin">
<gazebo>
<plugin name='diff_drive' filename='libgazebo_ros_diff_drive.so'>
<ros>
<namespace>/</namespace>
<remapping>cmd_vel:=cmd_vel</remapping>
<remapping>odom:=odom</remapping>
</ros>
<update_rate>30</update_rate>
<!-- wheels -->
<left_joint>left_wheel_joint</left_joint>
<right_joint>right_wheel_joint</right_joint>
<!-- kinematics -->
<wheel_separation>0.2</wheel_separation>
<wheel_diameter>0.064</wheel_diameter>
<!-- limits -->
<max_wheel_torque>20</max_wheel_torque>
<max_wheel_acceleration>1.0</max_wheel_acceleration>
<!-- output -->
<publish_odom>true</publish_odom>
<publish_odom_tf>true</publish_odom_tf>
<publish_wheel_tf>true</publish_wheel_tf>
<odometry_frame>odom</odometry_frame>
<robot_base_frame>base_footprint</robot_base_frame>
</plugin>
</gazebo>
</xacro:macro>
</robot>
fishbot
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="fishbot">
<!-- 基础部分 base_link -->
<xacro:include filename="$(find fishbot_description)/urdf/fishbot/base.urdf.xacro"/>
<!-- 传感器部分 -->
<xacro:include filename="$(find fishbot_description)/urdf/fishbot/sensor/imu.urdf.xacro"/>
<xacro:include filename="$(find fishbot_description)/urdf/fishbot/sensor/carema.urdf.xacro"/>
<xacro:include filename="$(find fishbot_description)/urdf/fishbot/sensor/laser.urdf.xacro"/>
<!-- 执行器部分 -->
<xacro:include filename="$(find fishbot_description)/urdf/fishbot/actuator/wheel.urdf.xacro"/>
<xacro:include filename="$(find fishbot_description)/urdf/fishbot/actuator/caster.urdf.xacro"/>
<!-- 插件 -->
<xacro:include filename="$(find fishbot_description)/urdf/fishbot/plugins/gazebo_control_plugin.xacro"/>
<xacro:base_xacro length="0.12" radius="0.10" />
<xacro:imu_xacro xyz="0.0 0.0 0.02" />
<xacro:carema_xacro xyz="0.10 0.0 0.075" />
<xacro:laser_xacro xyz="0.0 0.0 0.10" />
<xacro:wheel_xacro wheel_name="left_wheel" xyz="0 0.10 -0.06" />
<xacro:wheel_xacro wheel_name="right_wheel" xyz="0 -0.10 -0.06" />
<xacro:caster_xacro caster_name="front_wheel" xyz="0.08 0.0 -0.076" />
<xacro:caster_xacro caster_name="back_wheel" xyz="-0.08 0.0 -0.076" />
<xacro:gazebo_control_plugin />
</robot>
6.4.5 激光雷达传感器仿真
<gazebo reference="laser_link">
<sensor name="laserscan" type="ray">
<plugin name="laserscan" filename="libgazebo_ros_ray_sensor.so">
<ros>
<namespace>/</namespace>
<remapping>~/out:=scan</remapping>
</ros>
<output_type>sensor_msgs/LaserScan</output_type>
<frame_name>laser_link</frame_name>
</plugin>
<always_on>true</always_on>
<visualize>true</visualize>
<update_rate>5</update_rate>
<pose>0 0 0 0 0 0</pose>
<!-- 激光传感器配置 -->
<ray>
<!-- 设置扫描范围 -->
<scan>
<horizontal>
<samples>360</samples>
<resolution>1.000000</resolution>
<min_angle>0.000000</min_angle>
<max_angle>6.280000</max_angle>
</horizontal>
</scan>
<!-- 设置扫描距离 -->
<range>
<min>0.120000</min>
<max>8.0</max>
<resolution>0.015000</resolution>
</range>
<!-- 设置噪声 -->
<noise>
<type>gaussian</type>
<mean>0.0</mean>
<stddev>0.01</stddev>
</noise>
</ray>
</sensor>
</gazebo>
6.4.6 惯性测量传感器仿真
<gazebo reference="imu_link">
<sensor name="imu_sensor" type="imu">
<plugin name="imu_plugin" filename="libgazebo_ros_imu_sensor.so">
<ros>
<namespace>/</namespace>
<remapping>~/out:=imu</remapping>
</ros>
<initial_orientation_as_reference>false</initial_orientation_as_reference>
</plugin>
<update_rate>100</update_rate>
<always_on>true</always_on>
<!-- 六轴噪声设置 -->
<imu>
<angular_velocity>
<x>
<noise type="gaussian">
<mean>0.0</mean>
<stddev>2e-4</stddev>
<bias_mean>0.0000075</bias_mean>
<bias_stddev>0.0000008</bias_stddev>
</noise>
</x>
<y>
<noise type="gaussian">
<mean>0.0</mean>
<stddev>2e-4</stddev>
<bias_mean>0.0000075</bias_mean>
<bias_stddev>0.0000008</bias_stddev>
</noise>
</y>
<z>
<noise type="gaussian">
<mean>0.0</mean>
<stddev>2e-4</stddev>
<bias_mean>0.0000075</bias_mean>
<bias_stddev>0.0000008</bias_stddev>
</noise>
</z>
</angular_velocity>
<linear_acceleration>
<x>
<noise type="gaussian">
<mean>0.0</mean>
<stddev>1.7e-2</stddev>
<bias_mean>0.1</bias_mean>
<bias_stddev>0.001</bias_stddev>
</noise>
</x>
<y>
<noise type="gaussian">
<mean>0.0</mean>
<stddev>1.7e-2</stddev>
<bias_mean>0.1</bias_mean>
<bias_stddev>0.001</bias_stddev>
</noise>
</y>
<z>
<noise type="gaussian">
<mean>0.0</mean>
<stddev>1.7e-2</stddev>
<bias_mean>0.1</bias_mean>
<bias_stddev>0.001</bias_stddev>
</noise>
</z>
</linear_acceleration>
</imu>
</sensor>
</gazebo>
6.4.7 深度相机传感器仿真
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:include filename="$(find fishbot_description)/urdf/fishbot/common_inertial.xacro" />
<xacro:macro name="camera_xacro" params="xyz">
<!-- ============相机模块================ -->
<link name="camera_link">
<visual>
<origin xyz="0 0 0.0" rpy="0 0 0" />
<geometry>
<box size="0.02 0.10 0.02" />
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.8"/>
</material>
</visual>
<collision>
<origin xyz="0 0 0.0" rpy="0 0 0" />
<geometry>
<box size="0.02 0.10 0.02" />
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.8"/>
</material>
</collision>
<xacro:box_inertia m="0.01" l="0.02" w="0.02" h="0.10" />
</link>
<link name="camera_optical_link"></link>
<joint name="camera_optical_joint" type="fixed">
<parent link="camera_link" />
<child link="camera_optical_link" />
<origin xyz="0 0 0" rpy="${-pi/2} 0 ${-pi/2}" />
</joint>
<joint name="camera_joint" type="fixed">
<parent link="base_link" />
<child link="camera_link" />
<origin xyz="${xyz}" />
</joint>
</xacro:macro>
</robot>
<gazebo reference="camera_link">
<sensor type="depth" name="camera_sensor">
<plugin name="depth_camera" filename="libgazebo_ros_camera.so">
<frame_name>camera_optical_link</frame_name>
</plugin>
<always_on>true</always_on>
<update_rate>10</update_rate>
<camera name="camera">
<horizontal_fov>1.5009831567</horizontal_fov>
<image>
<width>800</width>
<height>600</height>
<format>R8G8B8</format>
</image>
<distortion>
<k1>0.0</k1>
<k2>0.0</k2>
<k3>0.0</k3>
<p1>0.0</p1>
<p2>0.0</p2>
<center>0.5 0.5</center>
</distortion>
</camera>
</sensor>
</gazebo>
6.5 使用 ROS2_control 驱动机器人
安装 ros2_control
sudo apt install ros-$ROS_DISTRO-ros2-control
sudo apt install ros-$ROS_DISTRO-ros2-controllers
sudo apt install ros-$ROS_DISTRO-gazebo-ros2-control
6.5.2 Gazebo 接入 ros2_control
config 下新建 fishbot_ros2_control.xacro
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:macro name="fishbot_ros2_control">
<ros2_control name="FishBotGazeboSystem" type="system">
<hardware>
<plugin>gazebo_ros2_control/GazeboSystem</plugin>
</hardware>
<joint name="left_wheel_joint">
<command_interface name="velocity">
<param name="min">-1</param>
<param name="max">1</param>
</command_interface>
<command_interface name="effort">
<param name="min">-0.1</param>
<param name="max">0.1</param>
</command_interface>
<state_interface name="position" />
<state_interface name="velocity" />
<state_interface name="effort" />
</joint>
<joint name="right_wheel_joint">
<command_interface name="velocity">
<param name="min">-1</param>
<param name="max">1</param>
</command_interface>
<command_interface name="effort">
<param name="min">-0.1</param>
<param name="max">0.1</param>
</command_interface>
<state_interface name="position" />
<state_interface name="velocity" />
<state_interface name="effort" />
</joint>
</ros2_control>
<gazebo>
<plugin filename="libgazebo_ros2_control.so" name="gazebo_ros2_control">
<parameters>$(find fishbot_description)/config/fishbot_ros2_controller.yaml</parameters>
</plugin>
</gazebo>
</xacro:macro>
</robot>
修改 fishbot.urdf.xacro
include fishbot.ros2_control.xacro
加入宏 fishbot_ros2_control
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="fishbot">
<!-- 基础部分 base_link -->
<xacro:include filename="$(find fishbot_description)/urdf/fishbot/base.urdf.xacro"/>
<!-- 传感器部分 -->
<xacro:include filename="$(find fishbot_description)/urdf/fishbot/sensor/imu.urdf.xacro"/>
<xacro:include filename="$(find fishbot_description)/urdf/fishbot/sensor/camera.urdf.xacro"/>
<xacro:include filename="$(find fishbot_description)/urdf/fishbot/sensor/laser.urdf.xacro"/>
<!-- 执行器部分 -->
<xacro:include filename="$(find fishbot_description)/urdf/fishbot/actuator/wheel.urdf.xacro"/>
<xacro:include filename="$(find fishbot_description)/urdf/fishbot/actuator/caster.urdf.xacro"/>
<!-- 插件 -->
<xacro:include filename="$(find fishbot_description)/urdf/fishbot/plugins/gazebo_control_plugin.xacro"/>
<xacro:include filename="$(find fishbot_description)/urdf/fishbot/plugins/gazebo_sensor_plugin.xacro"/>
<xacro:include filename="$(find fishbot_description)/urdf/fishbot/fishbot.ros2_control.xacro"/>
<xacro:base_xacro length="0.12" radius="0.10" />
<xacro:imu_xacro xyz="0.0 0.0 0.02" />
<xacro:camera_xacro xyz="0.10 0.0 0.075" />
<xacro:laser_xacro xyz="0.0 0.0 0.10" />
<xacro:wheel_xacro wheel_name="left_wheel" xyz="0 0.10 -0.06" />
<xacro:wheel_xacro wheel_name="right_wheel" xyz="0 -0.10 -0.06" />
<xacro:caster_xacro caster_name="front_wheel" xyz="0.08 0.0 -0.076" />
<xacro:caster_xacro caster_name="back_wheel" xyz="-0.08 0.0 -0.076" />
<!-- <xacro:gazebo_control_plugin /> -->
<xacro:gazebo_sensor_plugin />
<xacro:fishbot_ros2_control />
</robot>
列出所有控制器的类型
ros2 control list_controller_types
硬件接口
ros2 control list_hardware_interfaces
硬件组件
ros2 control list_hardware_components
6.5.3 使用关节状态发布控制器
此时打开 rviz2 会发现左右轮错误
yaml 增加
controller_manager:
ros__parameters:
update_rate: 100 # Hz
use_sim_time: true
fishbot_joint_state_broadcaster:
type: joint_state_broadcaster/JointStateBroadcaster
初始化并激活 fishbot_joint_state_broadcaster 控制器
ros2 control load_controller fishbot_joint_state_broadcaster --set-state active
将激活加入 launch
action_load_joint_state_controller = launch.actions.ExecuteProcess(
cmd=["ros2", "control", "load_controller", "fishbot_joint_state_broadcaster", "--set-state", "active"],
output='screen'
)
.......
return launch.LaunchDescription([
action_declare_arg_mode_path,
action_robot_state_publisher,
action_launch_gazebo,
action_spawn_entity,
launch.actions.RegisterEventHandler(
event_handler=launch.event_handlers.OnProcessExit(
target_action=action_spawn_entity,
on_exit=[action_load_joint_state_controller],
)
)
])
6.5.4 使用力控制器控制轮子
yaml 文件增加力控制器
controller_manager:
ros__parameters:
update_rate: 100 # Hz
use_sim_time: true
fishbot_joint_state_broadcaster:
type: joint_state_broadcaster/JointStateBroadcaster
fishbot_effort_controller:
type: effort_controllers/JointGroupEffortController
fishbot_effort_controller:
ros__parameters:
joints:
- left_wheel_joint
- right_wheel_joint
command_interfaces:
- effort
state_interfaces:
- position
- velocity
- effort
launch
action_load_effort_controller = launch.actions.ExecuteProcess(
cmd=["ros2", "control", "load_controller", "fishbot_effort_controller", "--set-state", "active"],
output='screen'
)
return launch.LaunchDescription([
action_declare_arg_mode_path,
action_robot_state_publisher,
action_launch_gazebo,
action_spawn_entity,
launch.actions.RegisterEventHandler(
event_handler=launch.event_handlers.OnProcessExit(
target_action=action_spawn_entity,
on_exit=[action_load_joint_state_controller],
)
),
launch.actions.RegisterEventHandler(
event_handler=launch.event_handlers.OnProcessExit(
target_action=action_load_joint_state_controller,
on_exit=[action_load_effort_controller],
)
)
])
6.5.5 用差速控制器控制机器人
yaml 加入差速控制器
fishbot_diff_drive_controller:
type: diff_drive_controller/DiffDriveController
fishbot_diff_drive_controller:
ros__parameters:
left_wheel_names: ["left_wheel_joint"]
right_wheel_names: ["right_wheel_joint"]
wheel_separation: 0.17
#wheels_per_side: 1 # actually 2, but both are controlled by 1 signal
wheel_radius: 0.032
wheel_separation_multiplier: 1.0
left_wheel_radius_multiplier: 1.0
right_wheel_radius_multiplier: 1.0
publish_rate: 50.0
odom_frame_id: odom
base_frame_id: base_footprint
pose_covariance_diagonal : [0.001, 0.001, 0.0, 0.0, 0.0, 0.01]
twist_covariance_diagonal: [0.001, 0.0, 0.0, 0.0, 0.0, 0.01]
open_loop: true
enable_odom_tf: true
cmd_vel_timeout: 0.5
#publish_limited_velocity: true
use_stamped_vel: false
#velocity_rolling_window_size: 10
删除力控制器,因为力控制器也能驱动车轮转动
action_load_diff_driver_controller = launch.actions.ExecuteProcess(
cmd=["ros2", "control", "load_controller", "fishbot_diff_drive_controller", "--set-state", "active"],
output='screen'
)
# action_load_diff_drive_controller = launch.actions.ExecuteProcess(
# cmd=["ros2", "control", "load_controller", "fishbot_diff_drive_controller", "--set-state", "active"],
# output='screen'
# )
return launch.LaunchDescription([
action_declare_arg_mode_path,
action_robot_state_publisher,
action_launch_gazebo,
action_spawn_entity,
launch.actions.RegisterEventHandler(
event_handler=launch.event_handlers.OnProcessExit(
target_action=action_spawn_entity,
on_exit=[action_load_joint_state_controller],
)
),
launch.actions.RegisterEventHandler(
event_handler=launch.event_handlers.OnProcessExit(
target_action=action_load_joint_state_controller,
on_exit=[action_load_diff_driver_controller],
)
),
# launch.actions.RegisterEventHandler(
# event_handler=launch.event_handlers.OnProcessExit(
# target_action=action_load_joint_state_controller,
# on_exit=[action_load_diff_drive_controller],
# )
# )
])
重映射(实际上已经不需要了)
将 remap 添加到控制器下
<plugin filename="libgazebo_ros2_control.so" name="gazebo_ros2_control">
<parameters>$(find fishbot_description)/config/fishbot_ros2_controller.yaml</parameters>
<ros>
<remapping>//fishbot_diff_drive_controller/odom:=/odom</remapping>
<remapping>//fishbot_diff_drive_controller/cmd_vel:=/cmd_vel</remapping>
</ros>
</plugin>

















 287
287

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









