






 本文探讨了ROS中的2D占用栅格地图(OccupancyGrid)及其颜色表示。介绍了OccupancyGrid消息类型的关键组成部分,包括header、info和data。详细解释了不同值(-128至127)在rviz中对应的颜色,特别是值100(占用)、0(空闲)和-1(未知)的颜色,并展示了16x16地图的完整颜色序列。同时,提供了查看地图数据的命令及实验代码。
本文探讨了ROS中的2D占用栅格地图(OccupancyGrid)及其颜色表示。介绍了OccupancyGrid消息类型的关键组成部分,包括header、info和data。详细解释了不同值(-128至127)在rviz中对应的颜色,特别是值100(占用)、0(空闲)和-1(未知)的颜色,并展示了16x16地图的完整颜色序列。同时,提供了查看地图数据的命令及实验代码。
最近在搞基于ROS的2D占用栅格地图,这类地图可用于机器人定位,它在机器人导航和避障方面很常用。它的消息类型是nav_msgs/OccupancyGrid,通过命令:rosmsg show nav_msgs/OccupancyGrid 可以看到nav_msgs/OccupancyGrid消息包含如下信息:
std_msgs/Header header
uint32 seq
time stamp
string frame_id
nav_msgs/MapMetaData info
time map_load_time
float32 resolution
uint32 width
uint32 height
geometry_msgs/Pose origin
geometry_msgs/Point position
float64 x
float64 y
float64 z
geometry_msgs/Quaternion orientation
float64 x
float64 y
float64 z
float64 w
int8[] data
对于一个nav_msgs/OccupancyGrid类型的map_msg,它主要由map_msg.header, map_msg.info, map_msg.data 三个主要信息,map_msg.header包含了发布地图的序列号(seq),时间戳(stamp)和帧id信息;map_msg.info包含了发布的地图的加载时间,分辨率,宽度,高度,地图起点坐标和方向;map_msg.data 数组包含了地图的元数据信息,可以看到,它是int8类型的,也就是说每个元数据的值范围是-128~127之间,在链接http://wiki.ros.org/map_server 中提到,

值100表示单元被占用;值0表示空闲,即未占用;-1(无符号类型下的255)表示未知。我们知道,这里不同的值含义不同,它们在rviz可视化界面上显示的颜色也不同,如下图所示
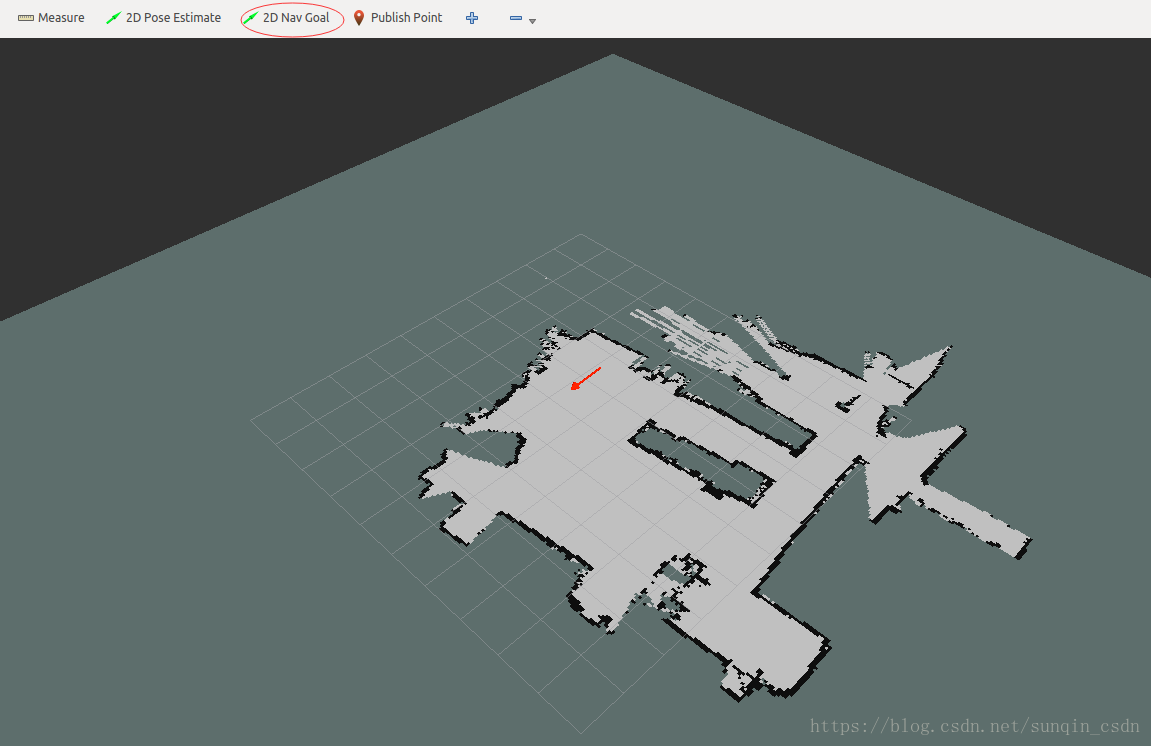
其中的黑色(值100)边界表示占用,图中红色箭头所在的灰色区域表示空闲(值0),而外围区域(深灰色?浅青色?)表示未知(-1)。这里我不禁好奇(好吧,我承认我是闲的。。。),那-128~127之间其他的值是什么颜色的呢,我发现答案可不是由黑到白色的一个过渡,这中间有彩色。
如上图所示,中间R,G,B颜色的坐标轴分别代表x,y,z的正方向。在这个
16
×
16
16\times16
16×16的栅格地图中(分辨率为1m),从下往上,从右往左对应的单元的像素值分别是:-128,-127,…,0,1,…,127。右下角(-128)是红色,左上角(127)是绿色。上图显示的所有颜色就是map_msg.data中的int8类型的数值范围-128~127所代表的所有颜色(虽然我也很懵逼为啥是这么个对应关系)。通过 rostopic echo /grid_map 命令输出地图消息,显示如下:
header:
seq: 24
stamp:
secs: 1591798531
nsecs: 117001314
frame_id: "map"
info:
map_load_time:
secs: 0
nsecs: 0
resolution: 1.0
width: 16
height: 16
origin:
position:
x: -8.0
y: -8.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 0.0
data: [-128, -127, -126, -125, -124, -123, -122, -121, -120, -119, -118, -117, -116, -115, -114, -113, -112, -111, -110, -109, -108, -107, -106, -105, -104, -103, -102, -101, -100, -99, -98, -97, -96, -95, -94, -93, -92, -91, -90, -89, -88, -87, -86, -85, -84, -83, -82, -81, -80, -79, -78, -77, -76, -75, -74, -73, -72, -71, -70, -69, -68, -67, -66, -65, -64, -63, -62, -61, -60, -59, -58, -57, -56, -55, -54, -53, -52, -51, -50, -49, -48, -47, -46, -45, -44, -43, -42, -41, -40, -39, -38, -37, -36, -35, -34, -33, -32, -31, -30, -29, -28, -27, -26, -25, -24, -23, -22, -21, -20, -19, -18, -17, -16, -15, -14, -13, -12, -11, -10, -9, -8, -7, -6, -5, -4, -3, -2, -1, 0, 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 17, 18, 19, 20, 21, 22, 23, 24, 25, 26, 27, 28, 29, 30, 31, 32, 33, 34, 35, 36, 37, 38, 39, 40, 41, 42, 43, 44, 45, 46, 47, 48, 49, 50, 51, 52, 53, 54, 55, 56, 57, 58, 59, 60, 61, 62, 63, 64, 65, 66, 67, 68, 69, 70, 71, 72, 73, 74, 75, 76, 77, 78, 79, 80, 81, 82, 83, 84, 85, 86, 87, 88, 89, 90, 91, 92, 93, 94, 95, 96, 97, 98, 99, 100, 101, 102, 103, 104, 105, 106, 107, 108, 109, 110, 111, 112, 113, 114, 115, 116, 117, 118, 119, 120, 121, 122, 123, 124, 125, 126, 127]
最后,奉上实验代码:
# include <iostream>
# include <ros/ros.h>
# include <nav_msgs/OccupancyGrid.h>
static ros::Publisher grid_pub;
static nav_msgs::OccupancyGrid gmap;
double grid_resolution = 1.0;
int grid_width = 16, grid_height = 16;
double origin_x, origin_y;
std::vector<double> logits(grid_height*grid_width, 0);
void grid_map_init()
{
origin_x = -1.0*grid_resolution*grid_width/2.0;
origin_y = -1.0*grid_resolution*grid_height/2.0;
gmap.header.frame_id = "map";
gmap.header.stamp = ros::Time::now();
gmap.info.origin.position.x = origin_x;
gmap.info.origin.position.y = origin_y;
gmap.info.origin.orientation.z = 0.0;
gmap.info.origin.orientation.w = 0.0;
gmap.info.resolution = grid_resolution;
gmap.info.width = grid_width;
gmap.info.height = grid_height;
int v = -128;
int8_t p[gmap.info.width * gmap.info.height];
for (int i = 0; i < gmap.info.height; ++i)
for (int j = 0; j < gmap.info.width; ++j)
p[i*gmap.info.height + j] = v++;
std::vector<int8_t> a(p, p+gmap.info.width * gmap.info.height);
gmap.data = a;
}
int main(int argc, char** argv)
{
ros::init(argc, argv, "test_occupancy");
ros::NodeHandle nh;
grid_pub = nh.advertise<nav_msgs::OccupancyGrid>("/grid_map", 1);
grid_map_init();
ros::Rate loop_rate(2);
while (ros::ok())
{
grid_pub.publish(gmap);
loop_rate.sleep();
}
return 0;
}

















 1362
1362




 到【灌水乐园】发言
到【灌水乐园】发言







