




 CAN总线在汽车电子中扮演重要角色,其通信质量受节点电容、终端电阻和共模扼流圈影响。节点电容需符合规范以防止总线波形畸变;终端电阻用于提高抗干扰能力和信号质量,通常选择120Ω以匹配线缆特征阻抗;共模扼流圈则能去除共模噪声,提高信号传输的稳定性。通过实验验证,共模扼流圈能显著抑制噪声,提升CAN和车载Ethernet的通信性能。
CAN总线在汽车电子中扮演重要角色,其通信质量受节点电容、终端电阻和共模扼流圈影响。节点电容需符合规范以防止总线波形畸变;终端电阻用于提高抗干扰能力和信号质量,通常选择120Ω以匹配线缆特征阻抗;共模扼流圈则能去除共模噪声,提高信号传输的稳定性。通过实验验证,共模扼流圈能显著抑制噪声,提升CAN和车载Ethernet的通信性能。
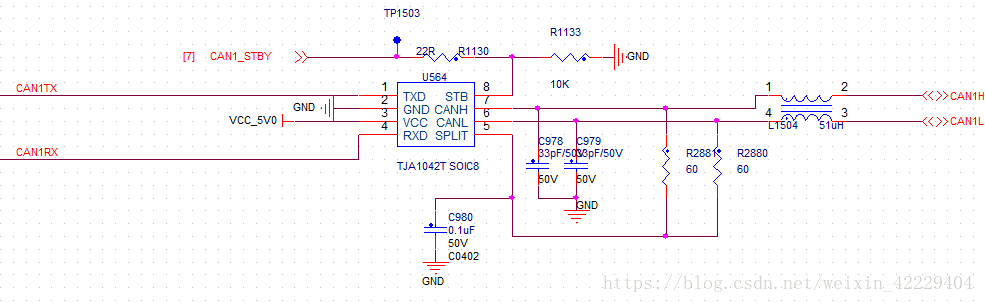
CAN的传输速度最大可达到1Mbps,它通过差分方式跟总线连接。
1.CAN节点的电容:
汽车CAN总线设计规范对于CAN节点的输入电容有着严格的规定,每个节点不允许添加过多容性器件,否则节点组合到一起后,会导致总线波形畸变,通讯错误增加。具体如表 1所示。为汽车测试标准GMW3122中的输入电容标准
电容通常都是PF极的,比较常见。在能够滤除噪声干扰的前提下,保证通讯质量。

所以每个厂家在上车前,都要测试CAN节点DUT(被测设备)的CANH对地、CANL对地、CANH对CANL的输入电容。方法一般是使用GMW3122汽车测试标准中的CAN方法。如图所示。




而这样的测试方法,有着比较大的局限性,只能看一个波形的放电时间进行测量和计算,人工误差较大,通过多次的统计,然后进行平均,非常消耗时间。另外由于电容属于非线性器件,使用方波测量,无法有效排除直流分量。
2.CAN终端电阻:
顾名思义就是加在总线末端的电阻。此电阻虽小,但在CAN总线中却有十分重要的作用。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1833
1833

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









