







 超级会员免费看
超级会员免费看
 本文详细介绍了如何在ROS中使用Rviz和Gazebo进行联合仿真运动,特别是针对导出的xxx_moveit_config包的参数设置。文章重点讲解了虚拟关节grasping_frame的作用及配置过程,包括urdf文件的修改、gazebo.launch文件的路径更新、ros_controllers.yaml中的控制器类型替换,以及解决gazebo进程卡死问题的方法。此外,还提醒读者注意配置过程中的一些常见坑点。
本文详细介绍了如何在ROS中使用Rviz和Gazebo进行联合仿真运动,特别是针对导出的xxx_moveit_config包的参数设置。文章重点讲解了虚拟关节grasping_frame的作用及配置过程,包括urdf文件的修改、gazebo.launch文件的路径更新、ros_controllers.yaml中的控制器类型替换,以及解决gazebo进程卡死问题的方法。此外,还提醒读者注意配置过程中的一些常见坑点。
经过上一节Rviz 和Gazebo联合仿真运动(一)的阅读,相信小伙伴们都能够成功导出xxx_moveit_config规划包了,但是估计还不能用,里面有一些参数需要设置,尤其是一些需要特别注意的坑,这一篇博客的目的是详细阐述如何使用导出的规划功能包。
题外话:这里讲一点题外话,就是关于上一节Rviz 和Gazebo联合仿真运动(一)中的一个虚拟关节grasping_frame到底用来干嘛的问题。详细如下:
首先,这个虚拟关节到底在哪里?看下图
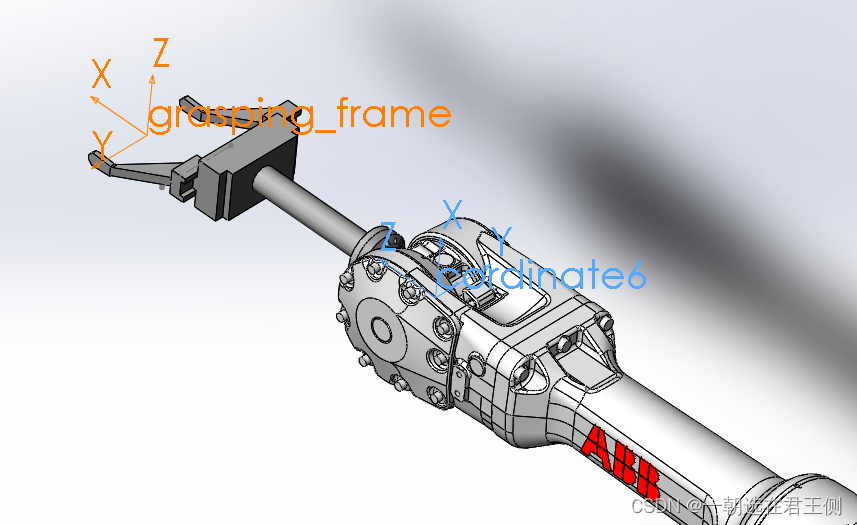
这个grasping_frame虚拟关节就设置在两个夹爪之间,后面进行仿真抓取的时候使用的就是这个关节---相当重要。有的小伙伴们就会问了?你为啥不在导出U

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 2821
2821









 到【灌水乐园】发言
到【灌水乐园】发言









