Note, selecting 'ros-foxy-shape-msgs' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-ros2bag' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-rmw-implementation' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-ros2cli' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-foonathan-memory-vendor' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-composition-interfaces' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-rosidl-typesupport-fastrtps-cpp' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-rcpputils' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-urdfdom-headers' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-unique-identifier-msgs' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-launch-xml' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-rosidl-default-generators' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-urdfdom' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-ros2doctor' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-ament-cpplint' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-rcl-interfaces' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-geometry-msgs' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-ament-cmake-ros' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-ament-lint-cmake' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-rosidl-runtime-py' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-domain-coordinator' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-rcl-logging-spdlog' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-rosidl-typesupport-c' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-io-context' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-tf2-tools' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-rmw-implementation-cmake' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-rosidl-typesupport-cpp' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-ament-flake8' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-sros2-cmake' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-rosbag2' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-rcutils' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-ament-cmake' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-rosapi-msgs' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-rclcpp-lifecycle' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-nav-msgs' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-rosapi' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-ament-cmake-copyright' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-ros2service' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-urdf' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-fastcdr' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-ros-workspace' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-yaml-cpp-vendor' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-ament-lint-common' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-ament-cmake-cppcheck' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-ros2node' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-stereo-msgs' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-rosbag2-converter-default-plugins' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-rosidl-parser' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-rosbag2-compression' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-ros-environment' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-rpyutils' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-gmock-vendor' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-gtest-vendor' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-rosidl-typesupport-connext-c' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-zstd-vendor' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-rosbag2-storage-default-plugins' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-shared-queues-vendor' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-ament-cppcheck' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-tf2-py' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-ament-pep257' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-ros2component' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-ros2launch' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-eigen3-cmake-module' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-ros2pkg' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-ament-index-python' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-urg-node' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-ament-cmake-export-targets' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-rosidl-adapter' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-tracetools' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-rosidl-runtime-c' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-ament-cmake-gtest' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-ament-cmake-xmllint' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-ros2run' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-statistics-msgs' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-trajectory-msgs' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-cartographer-ros-msgs' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-tf2-geometry-msgs' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-ament-package' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-cartographer' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-tf2-bullet' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-rcl-action' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-rosidl-typesupport-connext-cpp' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-serial-driver' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-kdl-parser' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-launch-testing' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-rosidl-generator-c' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-ament-cmake-export-link-flags' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-fastrtps' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-rosidl-typesupport-introspection-c' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-rosbag2-transport' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-launch-testing-ament-cmake' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-libyaml-vendor' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-rosidl-default-runtime' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-ros2action' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-orocos-kdl' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-cartographer-ros' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-class-loader' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-diagnostic-updater' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-tf2-eigen' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-rosbag2-storage' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-rclcpp' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-launch' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-ros2lifecycle' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-launch-testing-ros' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-sdl2-vendor' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-ament-cmake-pytest' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-urg-c' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-rosidl-cmake' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-ros2topic' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-diagnostic-msgs' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-ament-cmake-cpplint' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-tf2-kdl' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-fastrtps-cmake-module' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-ament-cmake-lint-cmake' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-urg-node-msgs' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-rosidl-typesupport-fastrtps-c' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-rclpy' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-ament-cmake-auto' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-rosbridge-library' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-rosidl-typesupport-introspection-cpp' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-rmw-fastrtps-shared-cpp' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-example-interfaces' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-ament-cmake-python' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-ament-uncrustify' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-ament-cmake-version' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-libstatistics-collector' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-sensor-msgs' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-ament-cmake-gmock' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-rclcpp-components' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-ament-lint-auto' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-test-msgs' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-std-msgs' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-ros2param' for glob 'ros-foxy-*'
Note, selecting 'ros-foxy-rmw-fastrtps-cpp' for glob 'ros-foxy-*'
Package 'ros-foxy-rmw-connext-cpp' is not installed, so not removed
Package 'ros-foxy-rosidl-typesupport-connext-c' is not installed, so not removed
Package 'ros-foxy-rosidl-typesupport-connext-cpp' is not installed, so not removed
E: Unable to locate package ros2-*
E: Couldn't find any package by glob 'ros2-*'
最新发布





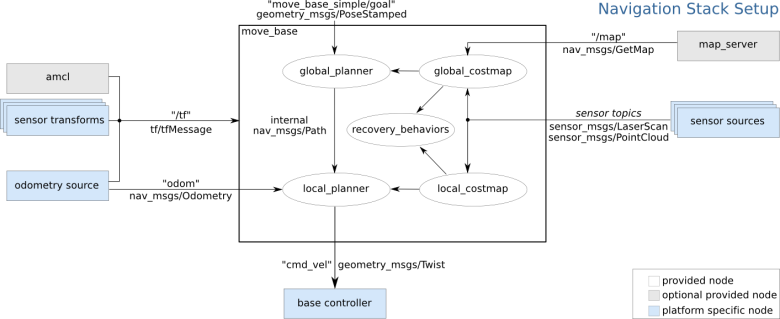
 本周工作聚焦于ROS导航部分的代码分析,详细解读导航架构图并将其映射到实际的代码结构。通过研究github上的navigation仓库,了解到每个子文件夹对应一个ROS包,主要使用C++编写。总结了代码结构和语言分布,为后续深入阅读和分析奠定了基础。
本周工作聚焦于ROS导航部分的代码分析,详细解读导航架构图并将其映射到实际的代码结构。通过研究github上的navigation仓库,了解到每个子文件夹对应一个ROS包,主要使用C++编写。总结了代码结构和语言分布,为后续深入阅读和分析奠定了基础。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 816
816

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









