




手动控制接口处理无线电遥控器 (RC) 和 MAVLink 操纵杆的输入,生成标准化的手动控制设定点和飞行控制系统的操作请求。该系统负责输入验证、信号源选择、校准、开关处理以及操纵杆解锁手势等安全功能。
有关使用这些手动控制输出的飞行控制系统的信息,请参阅“飞行控制系统”部分。有关提供替代手动控制输入的 MAVLink 通信的详细信息,请参阅“MAVLink 实现”部分。
系统架构
手动控制界面由两个主要模块组成,这两个模块协同工作以处理飞行员的输入:
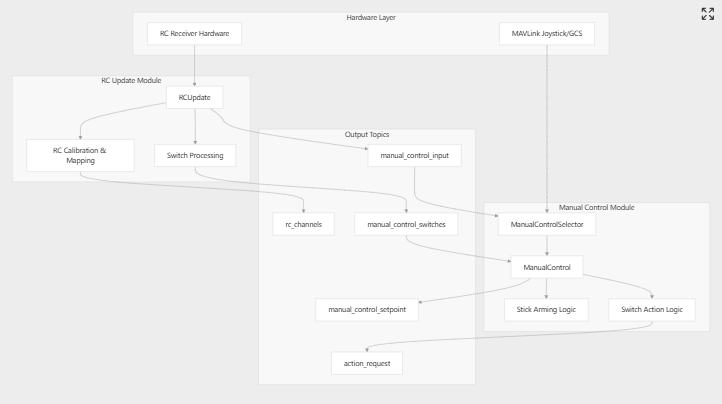
RC输入处理流程
该RCUpdate模块通过多级流水线处理原始RC输入:
RC通道校准
原始RC通道值使用每个通道的参数进行校准:

校准过程应用了定义在 中的死区变换、反转变换和缩放变换。
- 最小值/最大值:
RC{n}_MIN和RC{n}_MAX参数 - 修剪:
RC{n}_TRIM中心位置参数 - 死区:
RC{n}_DZ修剪区域周围零区域的参数 - 反转:
RC{n}_REV用于反转通道方向的参数
功能映射
通过以下方法将校准通道映射到飞行控制功能update_rc_functions():
| 功能 | 范围 | 目的 |
|---|---|---|
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 19
19

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









