







 本文介绍了在Windows环境下通过VMware安装Ubuntu和ROS,包括VMwareTools的安装,以及Ubuntu与Windows间文件交互的教程。还指导了如何通过运行roscore、turtlesim相关命令检查ROS环境配置。
本文介绍了在Windows环境下通过VMware安装Ubuntu和ROS,包括VMwareTools的安装,以及Ubuntu与Windows间文件交互的教程。还指导了如何通过运行roscore、turtlesim相关命令检查ROS环境配置。
在Windows环境下,安装在VMware中及Ubuntu的具体步骤可以看此篇博客:ROS(一):在Windows环境下,安装在VMware中及Ubuntu
在虚拟机中安装VMware Tools的具体步骤可以看此篇博客:ROS(二):在虚拟机中安装VMware Tools
Ubuntu与Windows之间的复制粘贴、文件拖拽的具体步骤可以看此篇博客:ROS(三):Ubuntu18.04实现与Windows之间的复制粘贴、文件拖拽
ROS安装的具体步骤可以看此篇博客:ROS(四):ROS安装
终端安装的具体步骤可以看此篇博客:ROS(五):终端安装
在安装完ROS操作系统后不确定自己的ROS安装是否完整,环境变量是否配置完善,这时候就需要使用ROS 内置了一些小程序,可以通过运行这些小程序以检测 ROS 环境是否可以正常运行。
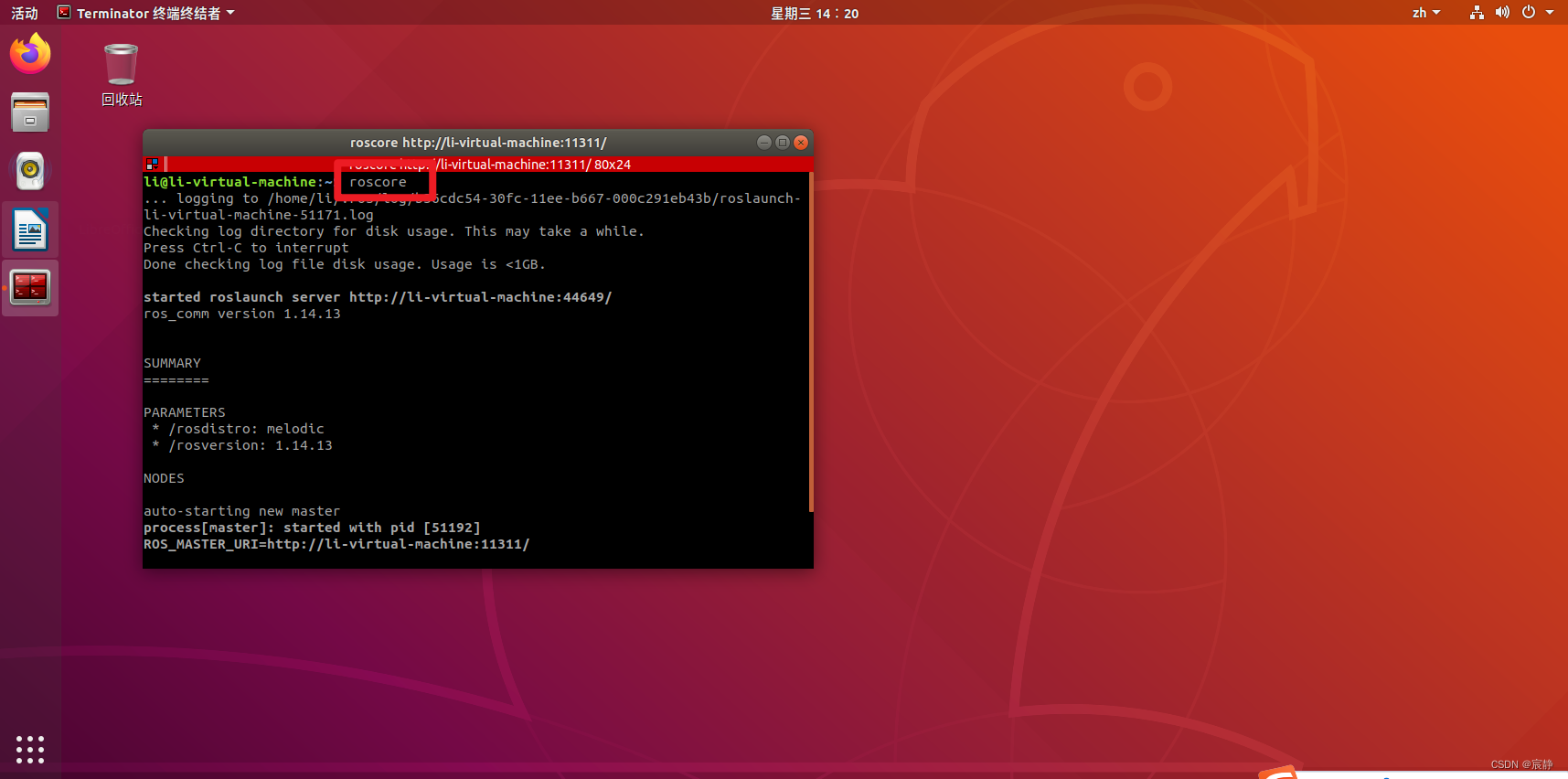
一、首先打开三个终端,第一个终端输入
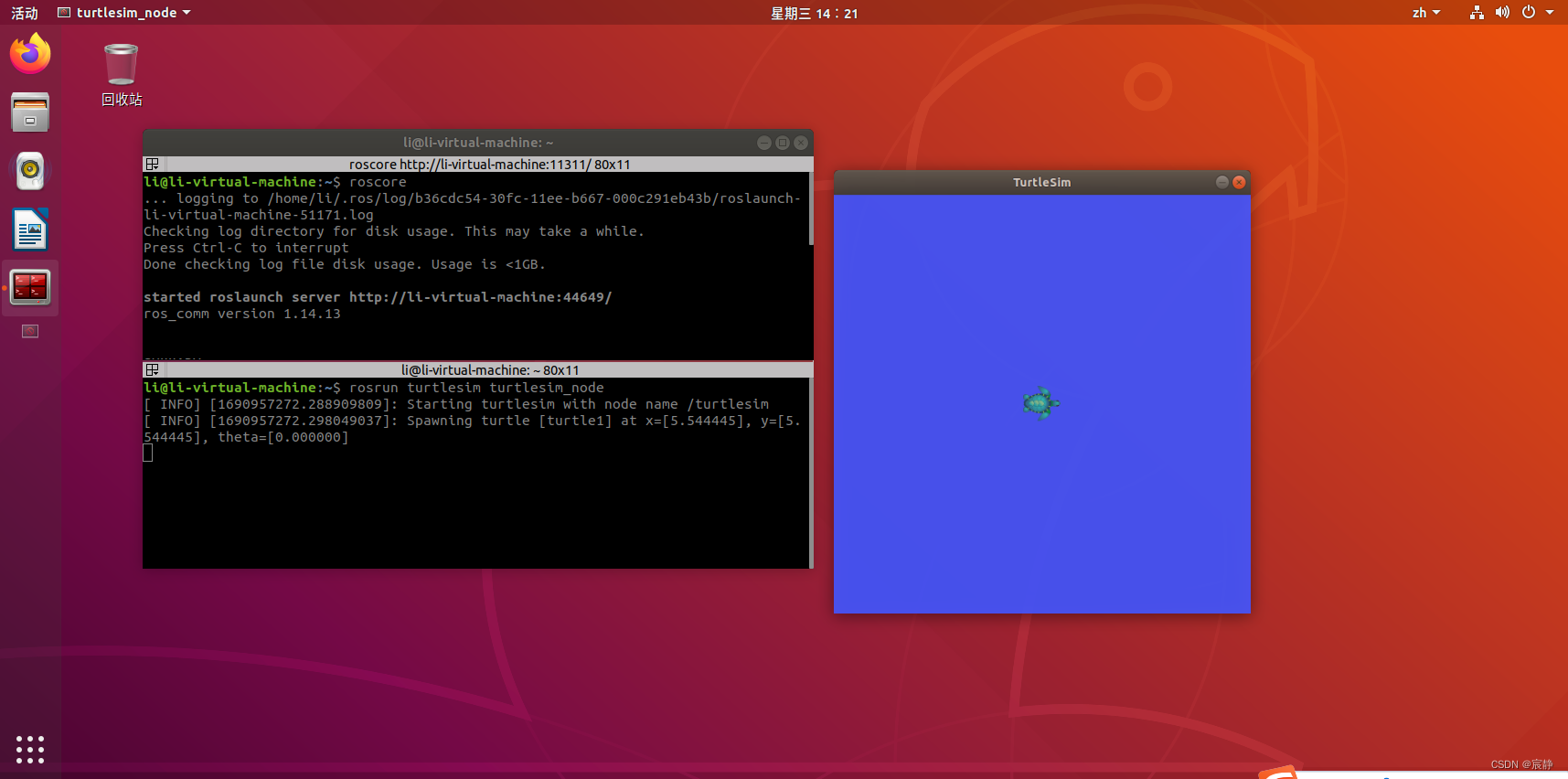
roscore二、在第二个终端输入
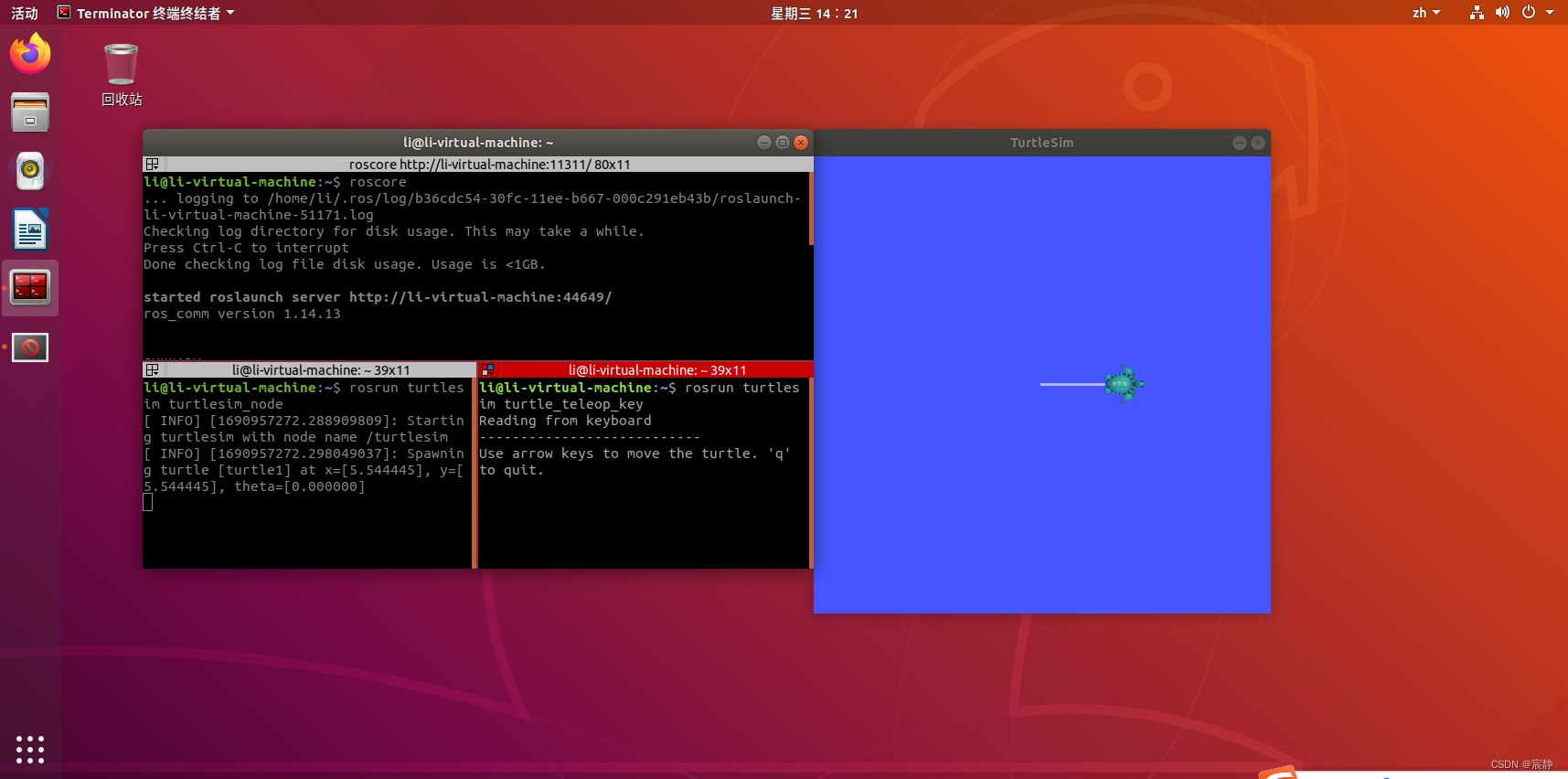
rosrun turtlesim turtlesim_node三、在第三个终端输入
rosrun turtlesim turtle_teleop_key完成图分别如下所示:



















 3423
3423

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











