







1.编译完单独的功能包的之后,如果要是catkin_make的话也不是编译整个工作空间,解除编译单个功能包将双引号里面的功能包名字去掉。
2.要更快的编译速度,catkin_make -j4 -l4,对cpu要求更高。四线程编译
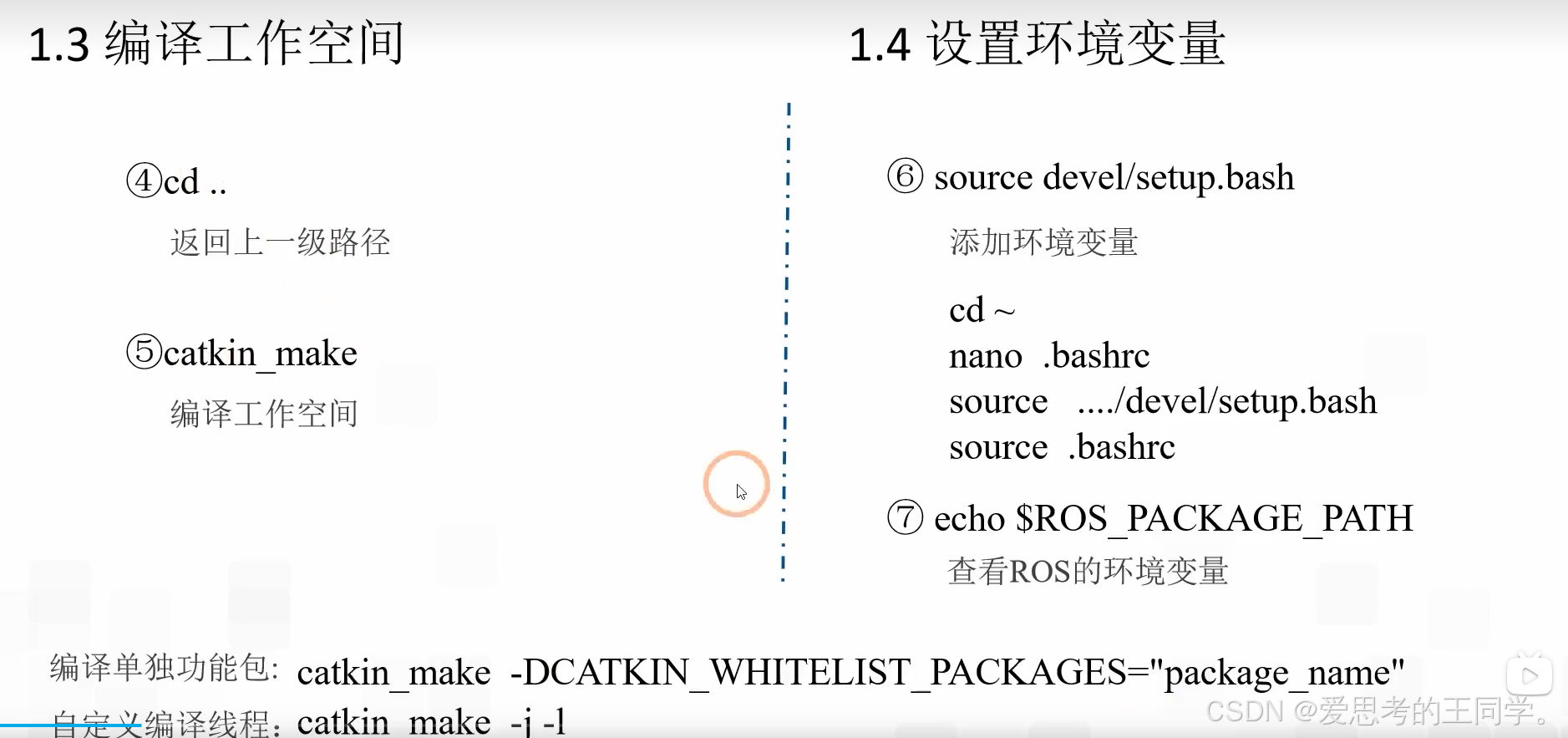
环境变量
添加环境变量只局限于当前的一个终端,再打开其他的会失效
添加全局的环境变量,...是工作空间
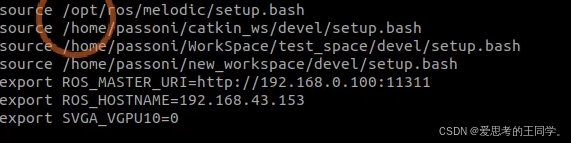
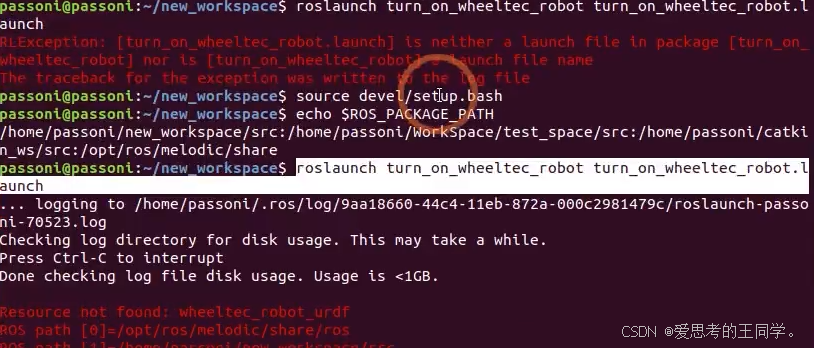
完事之后source.bashrc,就可以roslaunch
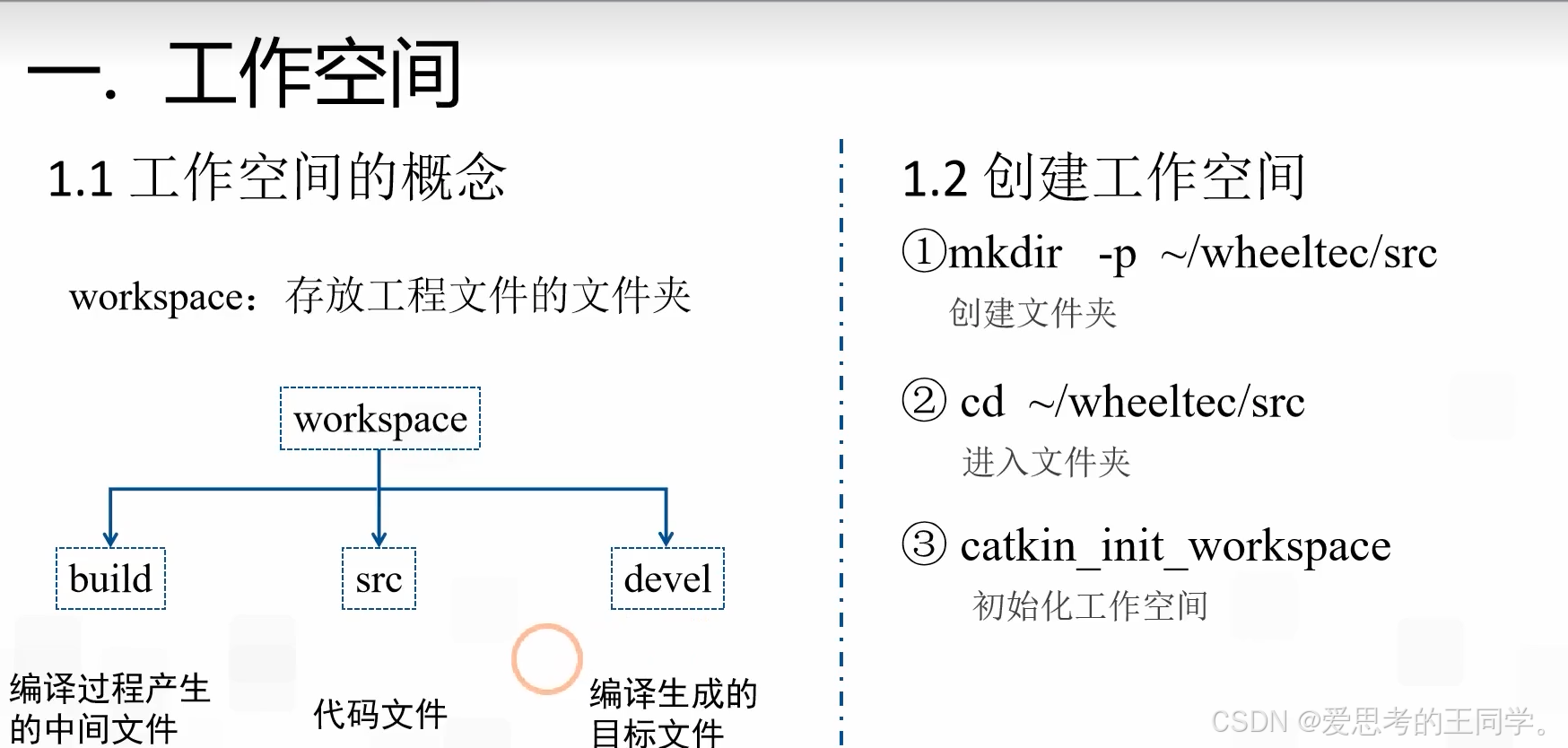
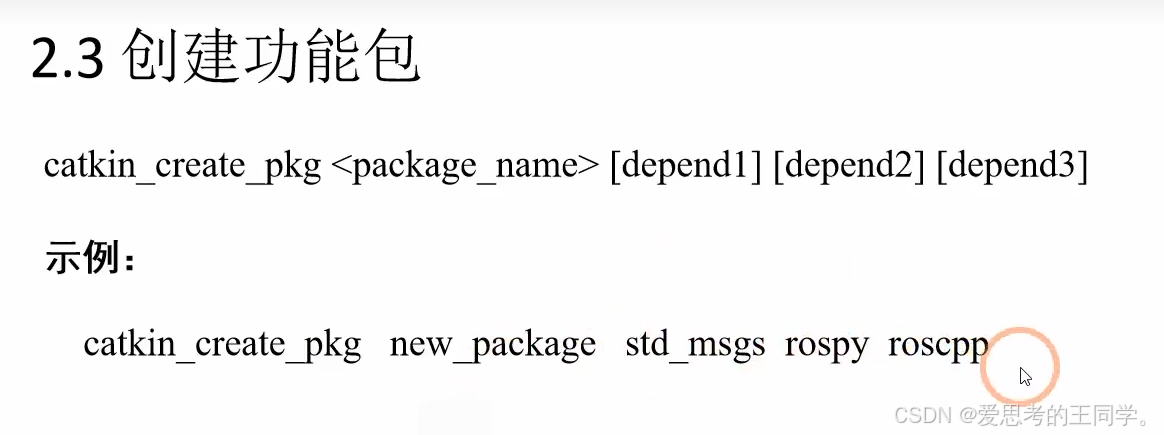
二、功能包
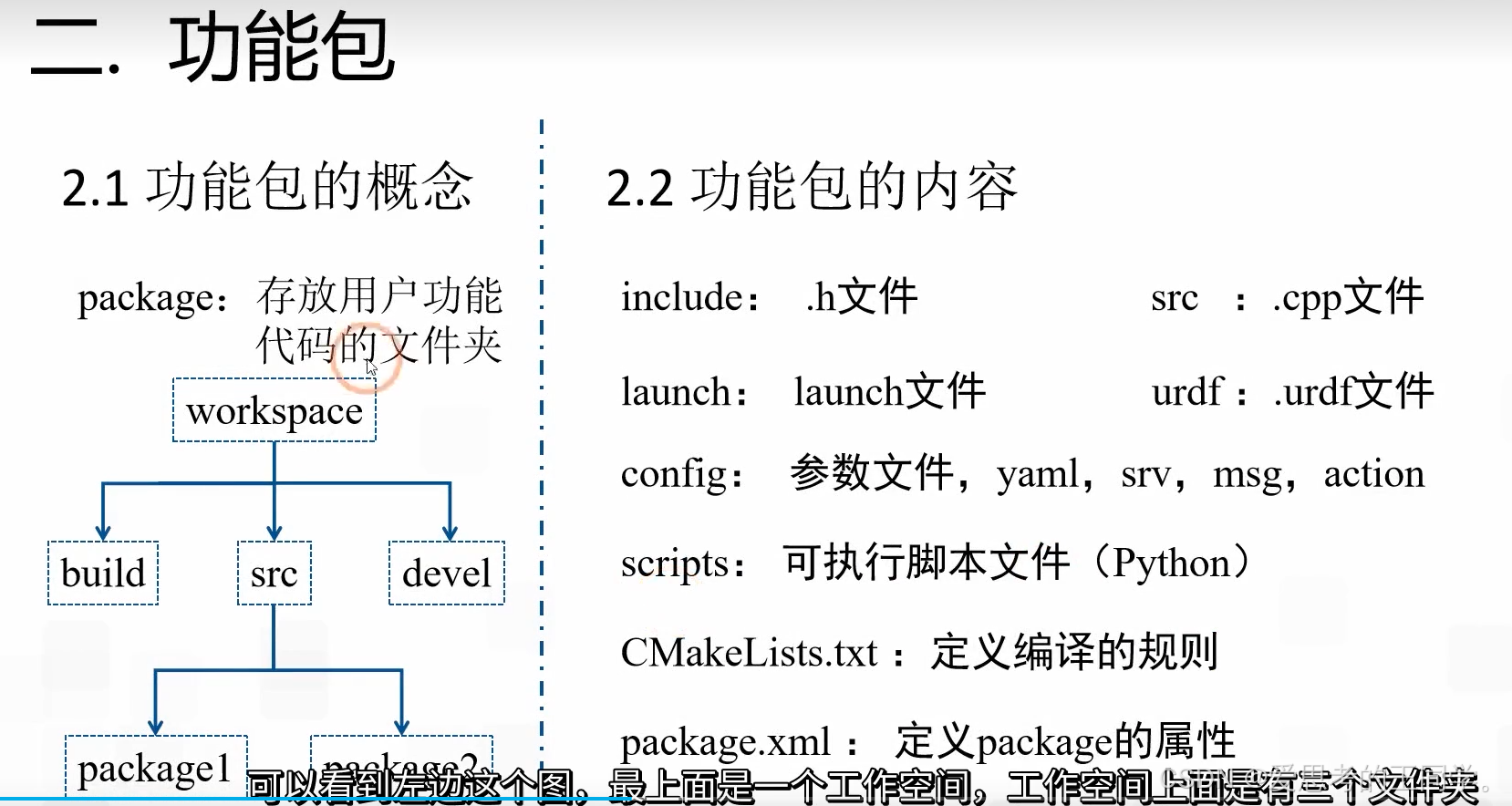
只有cmake和package是必须的
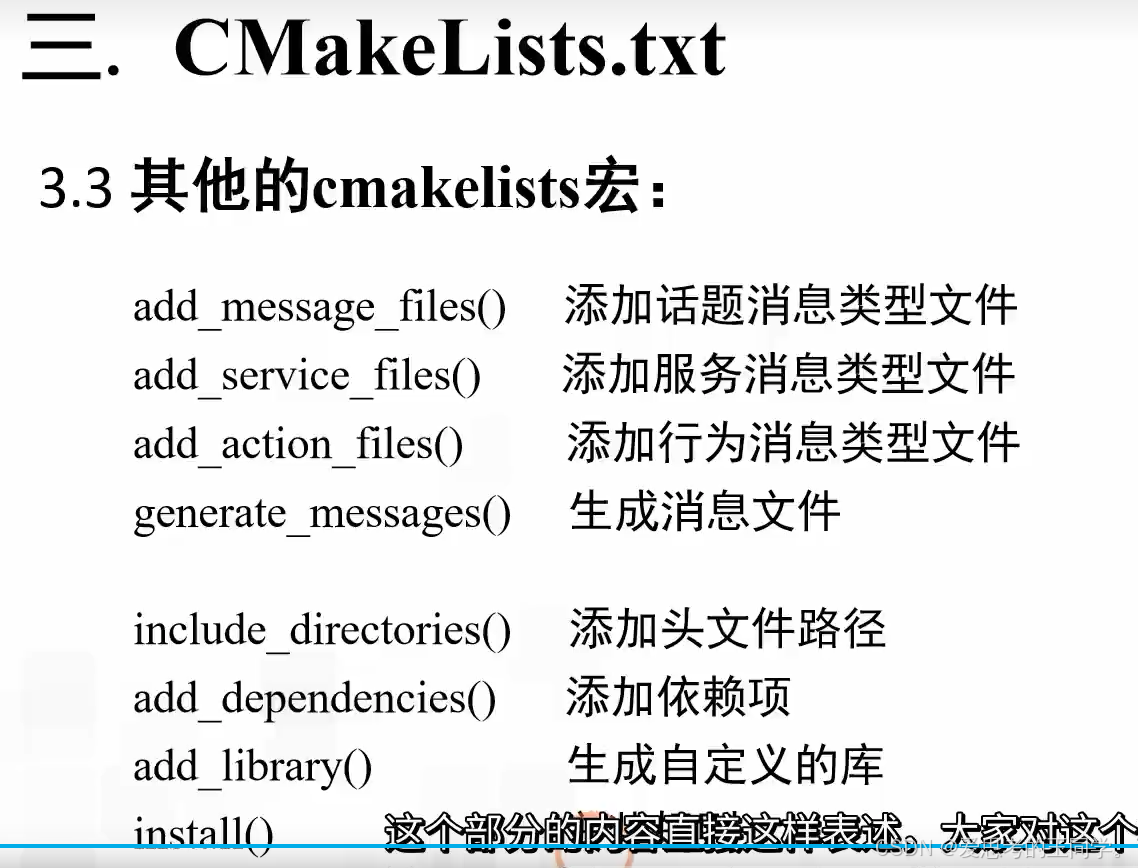
CMakeLists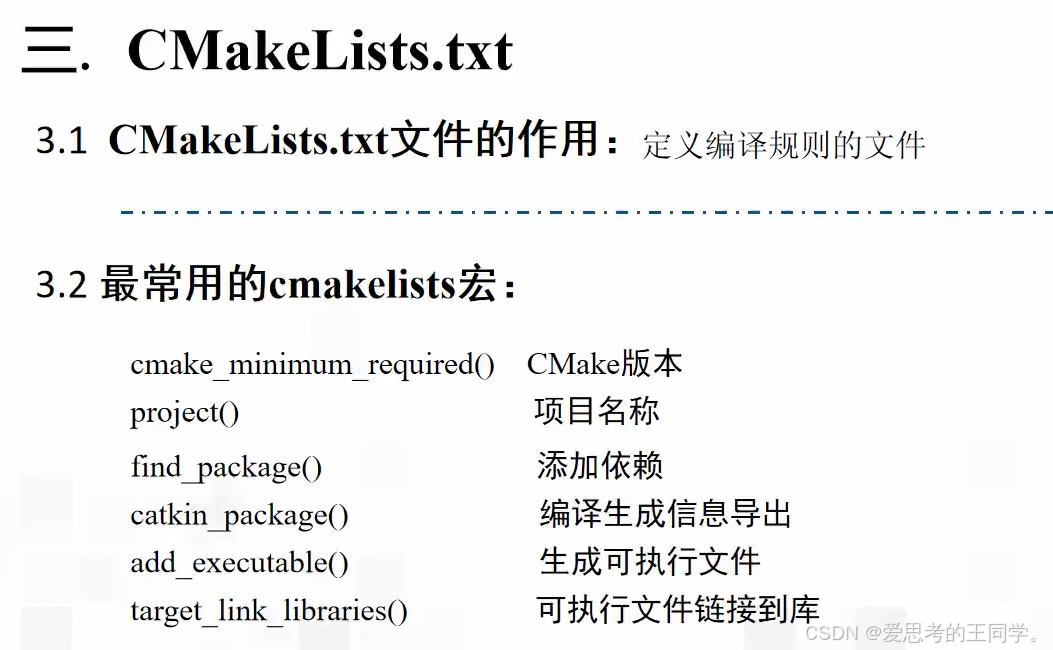
catkin/CMakeLists.txt - ROS Wiki
package


















 1590
1590

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









