







 本文档详细介绍了如何构建阿克曼小车的URDF模型,包括link、joint和偏移关系的设置,并通过xacro进行描述。此外,还讲解了在Gazebo中创建贴图模型、添加物理属性、配置传感器和执行器,以及解决模型加载问题的方法。提供了一系列关键步骤和示例代码,帮助读者快速搭建仿真环境。
本文档详细介绍了如何构建阿克曼小车的URDF模型,包括link、joint和偏移关系的设置,并通过xacro进行描述。此外,还讲解了在Gazebo中创建贴图模型、添加物理属性、配置传感器和执行器,以及解决模型加载问题的方法。提供了一系列关键步骤和示例代码,帮助读者快速搭建仿真环境。
阿克曼小车urdf模型搭建与gazebo仿真
参考:
文章仅为个人搭建urdf模型时的笔记,可能重点不突出,有的地方也不详细
请配合TIANBOT的博客(阿克曼结构移动机器人的gazebo仿真)一起阅读,能极大加快构建仿真环境的效率
一、urdf模型
1.urdf 模型搭建
1.1 link标签
wiki:查看哪些标签是必须的
<link name="my_link">
<!--惯性相关-->
<inertial>
<!--位置-->
<origin xyz="0 0 0.5" rpy="0 0 0"/>
<!--重量 kg-->
<mass value="1"/>
<!--惯性矩阵相关-->
<inertia ixx="100" ixy="0" ixz="0" iyy="100" iyz="0" izz="100" />
</inertial>
<!--可视化相关-->
<visual>
<origin xyz="0 0 0" rpy="0 0 0" />
<!--几何形状 m-->
<geometry>
<box size="1 1 1" />
</geometry>
<!--材质-->
<material name="Cyan">
<color rgba="0 1.0 1.0 1.0"/>
</material>
</visual>
<!--碰撞相关-->
<collision>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<cylinder radius="1" length="0.5"/>
</geometry>
</collision>
</link>
1.2 joint相关
wiki:查看哪些标签是必须的
<!--名称及活动方式-->
<joint name="my_joint" type="floating">
<origin xyz="0 0 1" rpy="0 0 3.1416"/>
<parent link="link1"/>
<child link="link2"/>
<calibration rising="0.0"/>
<dynamics damping="0.0" friction="0.0"/>
<limit effort="30" velocity="1.0" lower="-2.2" upper="0.7" />
<safety_controller k_velocity="10" k_position="15" soft_lower_limit="-2.0" soft_upper_limit="0.5" />
</joint>
- type:
- revolute-有上下限的旋转活动
- continuous-没有上下限的连续旋转
- prismatic-有上下限的滑动
- fixed-固定
- floating-没有约束,可在六个自由度运动,三平移三旋转
- plannar-允许在垂直于轴的某个平面内移动或转动
1.3 偏移关系讲解
<?xml version="1.0"?>
<robot name="arckmann_car">
<link name="base_link">
<!--可视化相关-->
<visual>
<!--几何形状 m-->
<geometry>
<box size="5 3 1" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" /> <!--不偏移-->
<!--材质-->
<material name="Cyan">
<color rgba="0 1.0 1.0 1.0"/>
</material>
</visual>
</link>
<joint name="camera_to_baselink" type="continuous">
<parent link="base_link"/>
<child link="camera"/>
<origin xyz="-1 0 0" rpy="0 0 0"/> <!--x偏移-1-->
<axis xyz="0 0 1"/>
</joint>
<link name="camera">
<visual>
<geometry>
<box size="1 1 1" />
</geometry>
<origin xyz="0 0 2" rpy="0 0 0" /> <!--z偏移2-->
<material name="Red">
<color rgba="1 0 0 0.5"/>
</material>
</visual>
</link>
</robot>
如图,base_link不偏移,camera在自身坐标系下向上偏移2,joint标签只是表明了base_link和camera的偏移关系。
2. xacro描述机器人
- 使用xacro时根标签必须包含
<robot name="XXX" xmlns:xacro="http://ros.org/wiki/xacro"> - 属性定义:
<xacro:property name="XXXX" value="YYYY"> - 属性调用:
${XXXX} - 属性块定义与调用:
<xacro:property name="front_left_origin">
<origin xyz="0.3 0 0" rpy="0 0 0" />
</xacro:property>
<pr2_wheel name="front_left_wheel">
<xacro:insert_block name="front_left_origin" />
</pr2_wheel>
- 数学公式计算:${a+b/c}
- 条件判断的使用
<xacro:if value="<expression>"> <!-- value="${变量=='值'}" -->
<... some xml code here ...>
</xacro:if>
<xacro:unless value="<expression>">
<... some xml code here ...>
</xacro:unless>
- 函数定义与调用
<!--函数声明,传入参数-->
<xacro:macro name="XXXX" params="YY ZZ">
${YY} <!--形参-->
</xacro:macro>
<!--函数调用-->
<xacro:XXXX YY="?" ZZ="?" />
- 头文件包含:
<xacro:include filename="$(find hhbot_description)/urdf/hhbot_body.urdf.xacro" />
3. rviz中加载urdf
<launch>
<arg name="model" />
<param name="robot_description" textfile="$(find suv1)/urdf/suv.urdf" />
<node name="joint_state_publisher_gui" pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" />
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" />
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find suv1)/urdf.rviz" />
</launch>
4. solidworks阿克曼模型创建
不要用solidworks直接导出的urdf文件去配置,最好是先用简单形状把模型搭好跑通之后去修改link中的vision标签
二、Gazebo
1. 创造gazebo贴图模型
1.为link添加gazebo标签
- 添加颜色
<gazebo reference="base_link">
<material>Gazebo/GreenTransparent</material>
</gazebo>
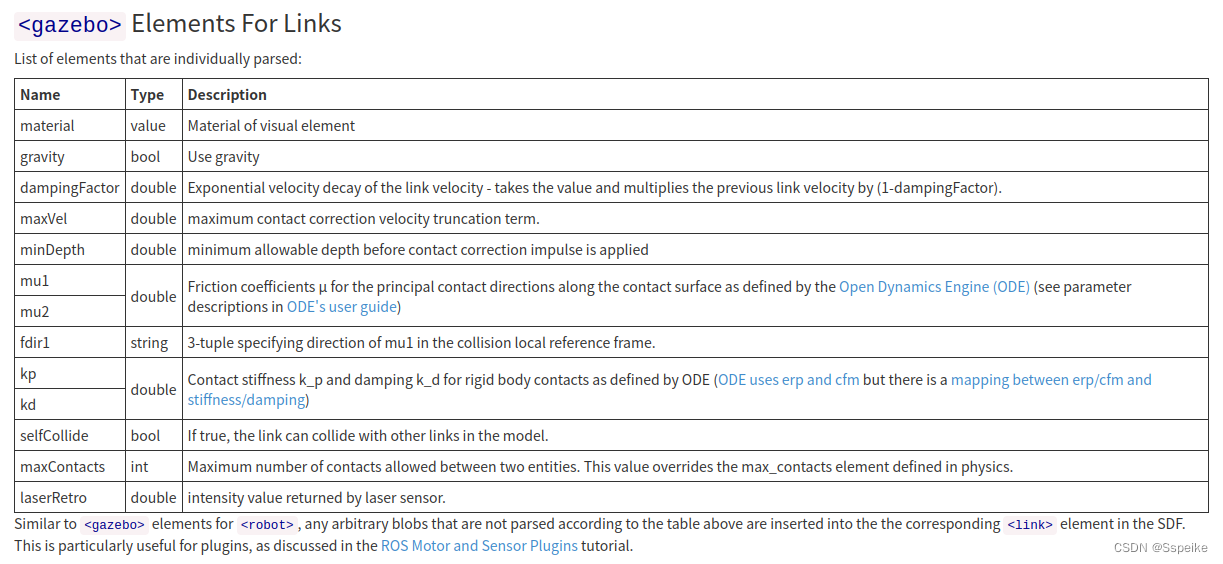
- 添加摩擦力
3. 配置gazebo传感器和执行器
4. gazebo加载urdf模型
- 若出现模型翻转或与初始位置不对的情况,如下,将paused改为true,观察初始加载时模型的状态,有可能嵌到了地下
<!-- 运行gazebo仿真环境 -->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="debug" value="false" />
<arg name="gui" value="true" />
<arg name="paused" value="true" />
<arg name="use_sim_time" value="true" />
<arg name="headless" value="false" />
</include>

















 197
197

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









