







大三下(本学期)《工业机器人》课程作业,要求利用Matlab Robotics ToolBox完成对埃夫特ER3A-C60六轴机器人的正逆运动学分析。除了DH参数不一样外,其余知识同之前的文章对斯坦福机械手的建模类似。
文章目录
一、建模对象
埃夫特ER3A-C60六轴机器人。
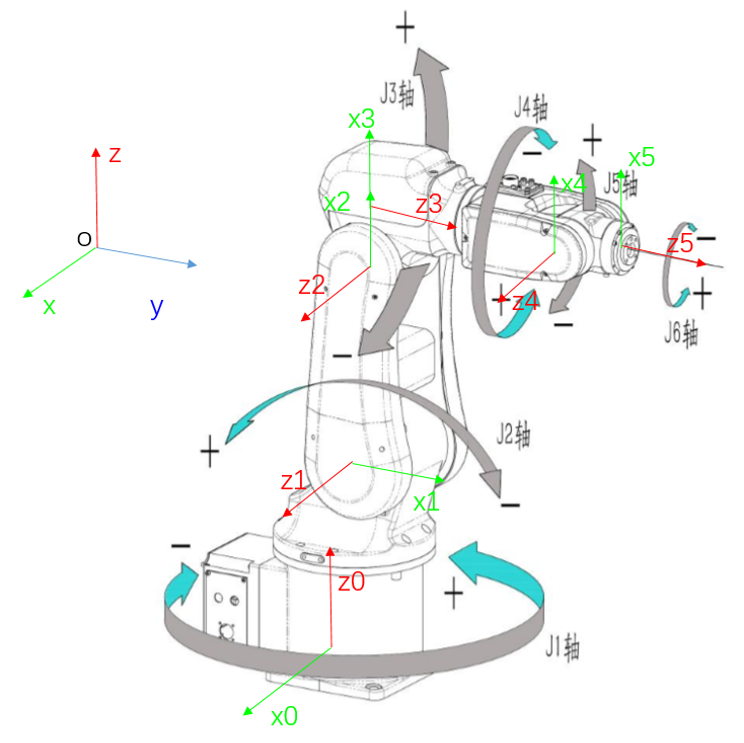
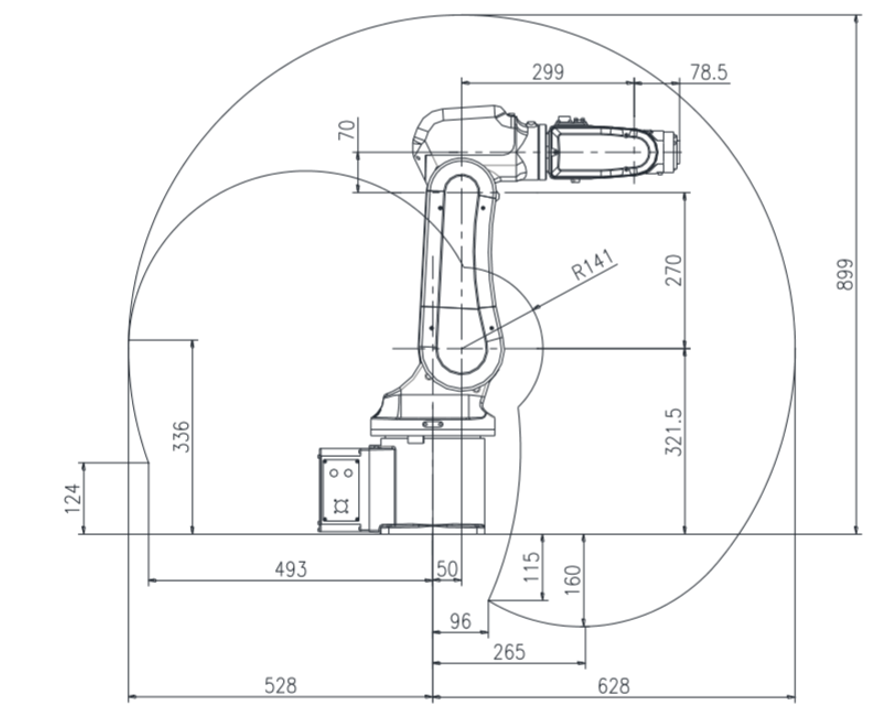
二、D-H法建模分析
6个关节均为旋转副,利用D-H对机器人手臂建立坐标系如下:
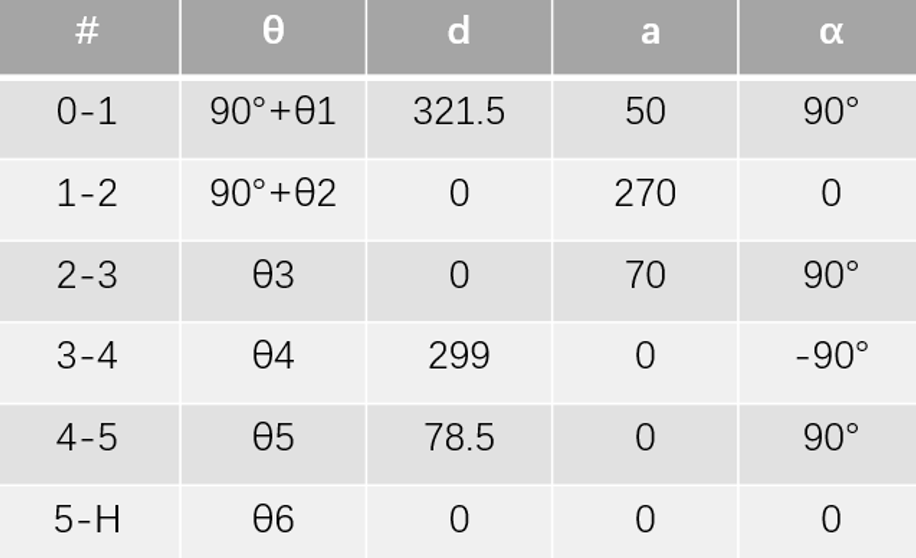
制D-H参数表如下:
三、Matlab Robotics ToolBox建模分析
3.1、关节定义
%关节定义
% th d a alpha sigma
L(1) = Link([ pi/2 321.5 50 pi/2 0]);
L(2) = Link([ pi/2 0 270 0 0]);
L(3) = Link([ 0 0 70 pi/2 0]);
L(4) = Link([ 0 299 0 -pi/2 0]);
L(5) = Link([ 0 78.5 0 pi/2 0]);
L(6) = Link([ 0 0 0 0 0]);
3.2、关节限位
通过参考手册,可以知道埃夫特ER3A-C60六轴机器人具有如下关节限位:
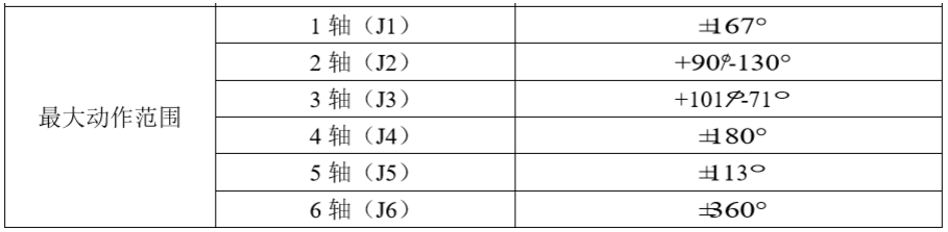
因此,修改关节qlim属性如下:
% 关节参数范围限定
L(1).qlim = [-167 167]*pi/180;
L(2). 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 4077
4077

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









