







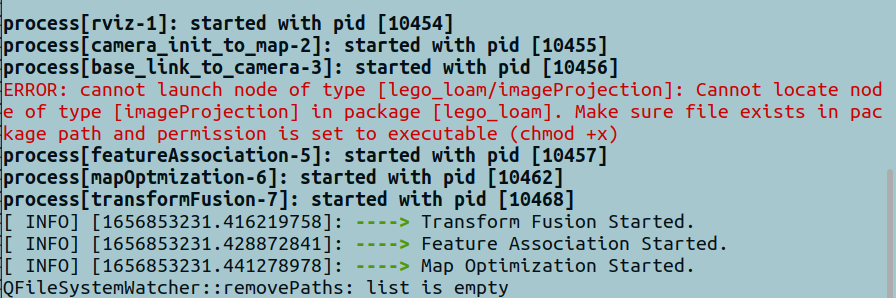
运行LEGO官方包launch文件报错:ERROR: cannot launch node of type [lego_loam/imageProjection]: Cannot locate node of type [imageProjection] in package [lego_loam]. Make sure file exists in package path and permission is set to executable (chmod +x)
解决:重新编译包
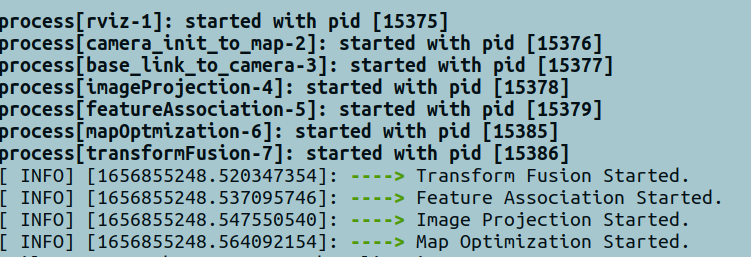
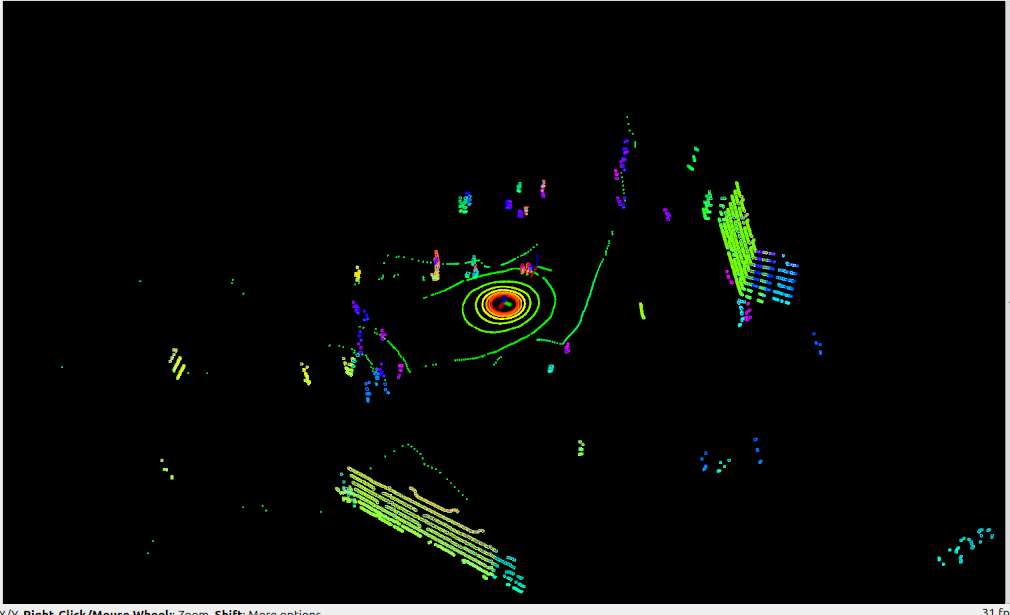
结果:



















04-06
 3万+
3万+
3万+
09-11
2443
2443
07-21
2340
2340
06-14
2793
2793
04-03

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











