







打开rviz和gazebo联合运动
运行指令:
roslaunch probot_anno_moveit_config demo_gazebo.launch
rviz显示情况:
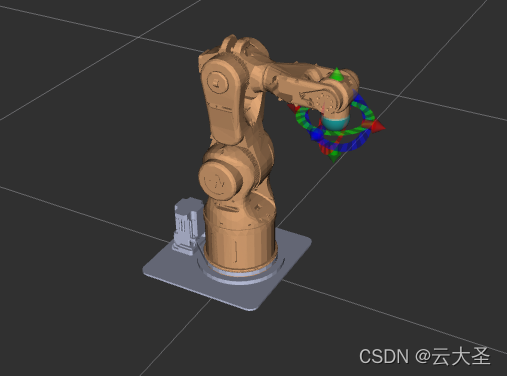
gazebo显示情况:
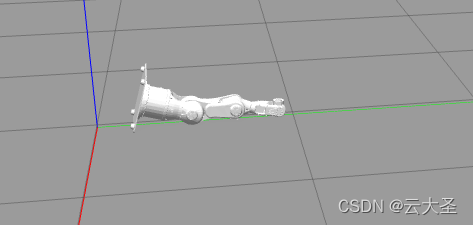
解决方案:
虚拟机+ubuntu20.04
更换了新的urdf文件之后好了,当前urdf具体问题原因还未找到!
运行指令:
roslaunch probot_anno_moveit_config demo_gazebo.launch
rviz显示情况:
gazebo显示情况:
解决方案:
虚拟机+ubuntu20.04
更换了新的urdf文件之后好了,当前urdf具体问题原因还未找到!
 4012
1万+
729
4012
1万+
729

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























