







运行古月老师的模型:
提示错误:
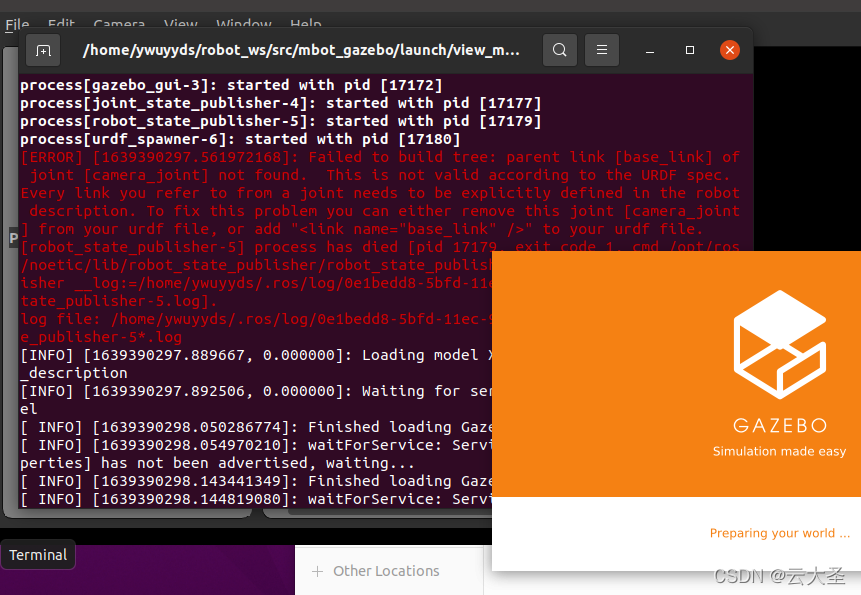
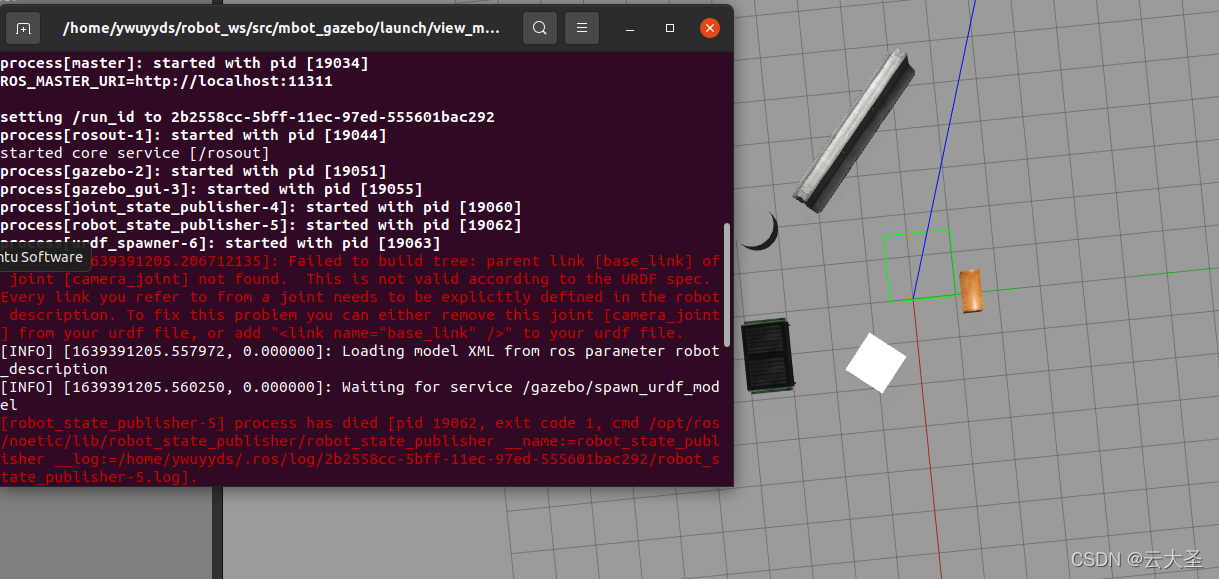
有些模型可以显示,但是仿真的小车却没有,并且以上错误;
解决方案:

在gazebo.xacro文件当中,把这个空间名称加入就可以。
总结一下,古月老师的模型大部分你运行不起来就是环境配置问题,本人用的是ubuntu20.04,所以很多都是需要加入xacro的引入,或者直接使用urdf是没有这个问题把。
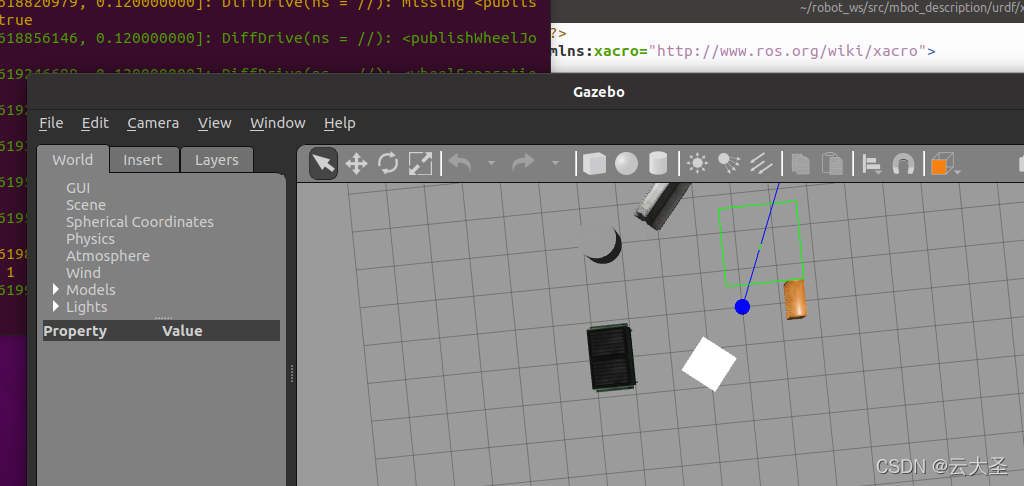
另外补充一下:解决这个问题之后我出现了机器人没有轮子的情况,那就需要修改一下轮子调用的宏和惯性参数的xacro的空间,如下:
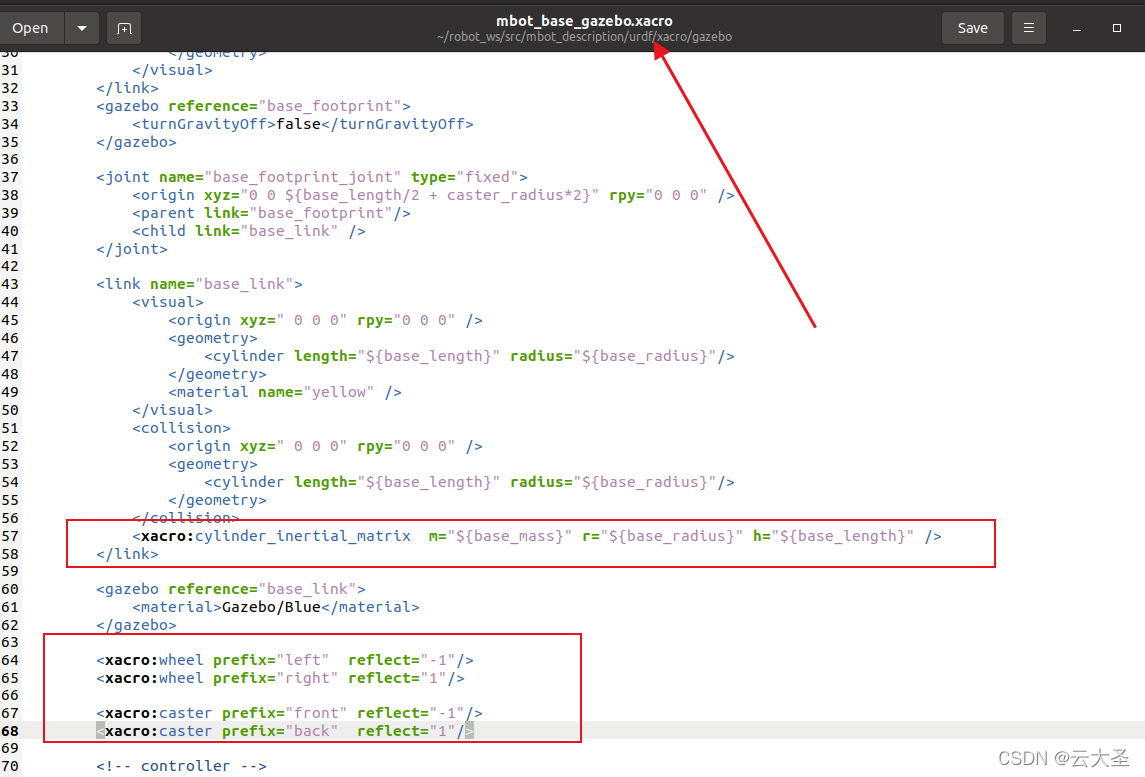
到此,就可以正常运行这个gazebo文件了


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









