






https://wiki.ros.org/melodic/Installation/Ubuntu
1.首先安装ROS,此处我使用鱼香肉丝快捷安装
wget http://fishros.com/install -O fishros && . fishros
2.安装Gazebo
( 大佬链接如下):
Gazebo学习(一)Ubuntu20.04安装ROS+gazebo11+模型库导入(汇总跳转连接+个人安装记录)_gazebo模型库-优快云博客
1.设置你的电脑来接收软件
sudo sh -c 'echo "deb http://packages.osrfoundation.org/gazebo/ubuntu-stable `lsb_release -cs` main" > /etc/apt/sources.list.d/gazebo-stable.list'
2.设置秘钥
wget https://packages.osrfoundation.org/gazebo.key -O - | sudo apt-key add -3.安装Gazebo
sudo apt-get update sudo apt-get install gazebo11 sudo apt-get install libgazebo11-dev
4.检查你的安装
gazebo
5.其他关联安装包
sudo apt-get install ros-noetic-rviz
sudo apt-get install ros-noetic-robot-state-publisher
sudo apt-get install ros-noetic-gazebo-ros-pkgs ros-noetic-gazebo-ros-control
sudo apt install ros-noetic-moveit
之后运行 安装包索引
sudo apt-get update
3.获得模型库
1打开/.gazebo文件夹
由于文件夹是隐藏状态,打开主文件夹摁“ Ctrl + H ”可以显示隐藏文件夹

或者点击操作显示隐藏文件夹

2下载模型
git clone https://github.com/osrf/gazebo_models下载完毕后得到模型库加载到/.gazebo/gazebo_models文件夹当中
4. uuv_simulator 安装
(原大佬链接如下)
Ubuntu20 uuv_simulator 安装_uuvsimulater 教程-优快云博客
Ubuntu20.04通过命令行下载
git clone --branch noetic https://github.com/arturmiller/uuv_simulator.git
5.uuv_simulator编译生成相关库和可执行文件,及可能出现问题(部分问题)的解决办法
1.创建工作空间
mkdir -p ~/uuv_ws/src
cd ~/uuv_ws/src
2.克隆UUV Simulator仓库:
git clone https://github.com/uuvsimulator/uuv_simulator.git
3.安装依赖:
cd ~/uuv_ws
rosdep install --from-paths src --ignore-src -r -y
(
注意:此处会报错 : sudo rosdep init
rosdep update
详细解决方法见大标题6(下下面)
)
4.编译工作空间:
cd ~/uuv_ws
catkin_make
5.设置环境变量:
source ~/uuv_ws/devel/setup.bash
6.启动仿真场景:
roslaunch uuv_gazebo_worlds auv_underwater_world.launch

以上步骤将编译UUV Simulator的源码,并生成相关的库和可执行文件。编译过程可能会因为系统环境和依赖项的不同而有所差异,如果遇到编译错误,您可能需要检查依赖项是否安装正确,或者参考UUV Simulator的官方文档或社区讨论来解决问题。
7. 启动各种仿真场景及stl模型导入,机器模型控制
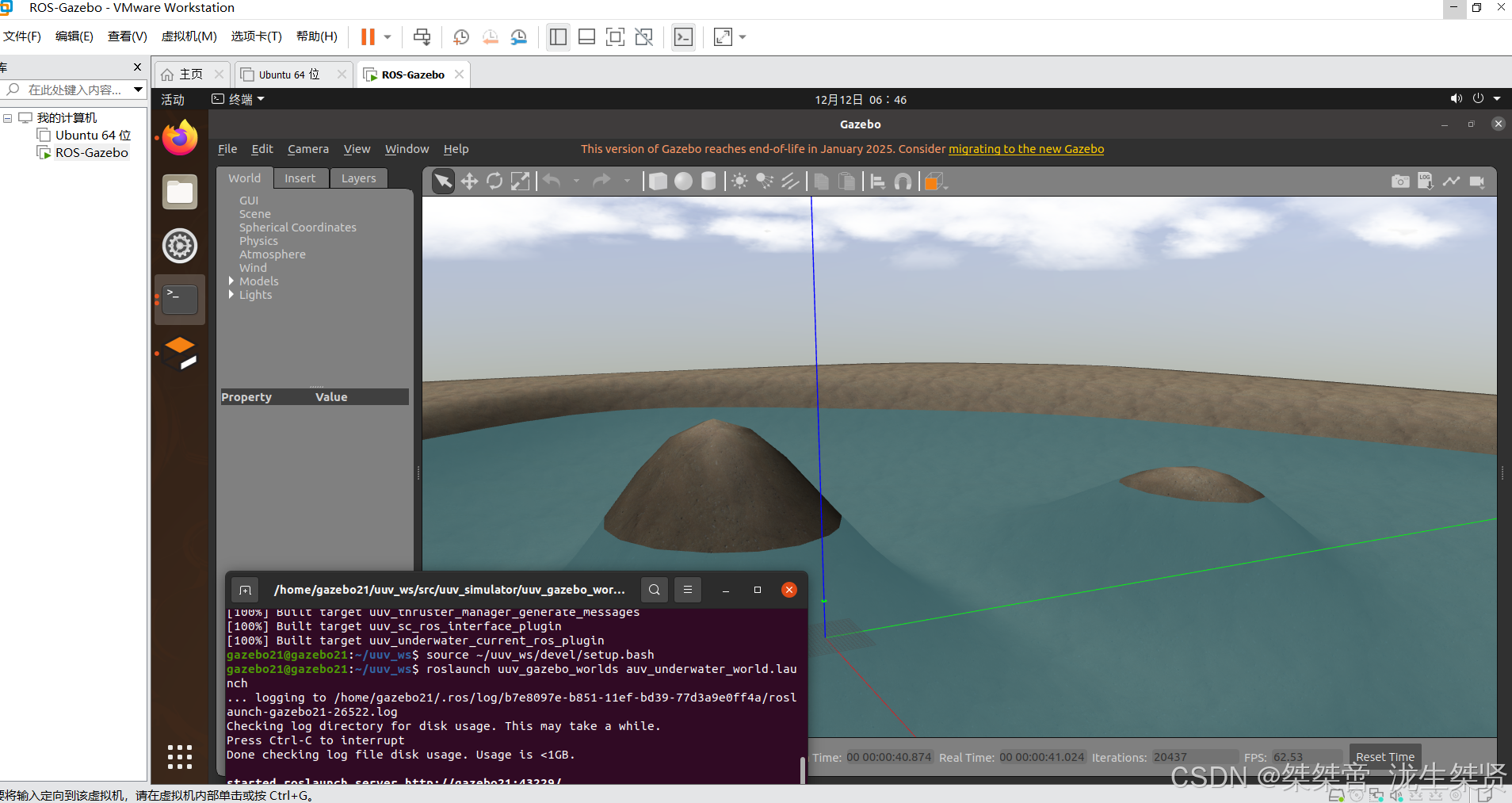
启动带海底的世界执行命令:
roslaunch uuv_gazebo_worlds auv_underwater_world.launch

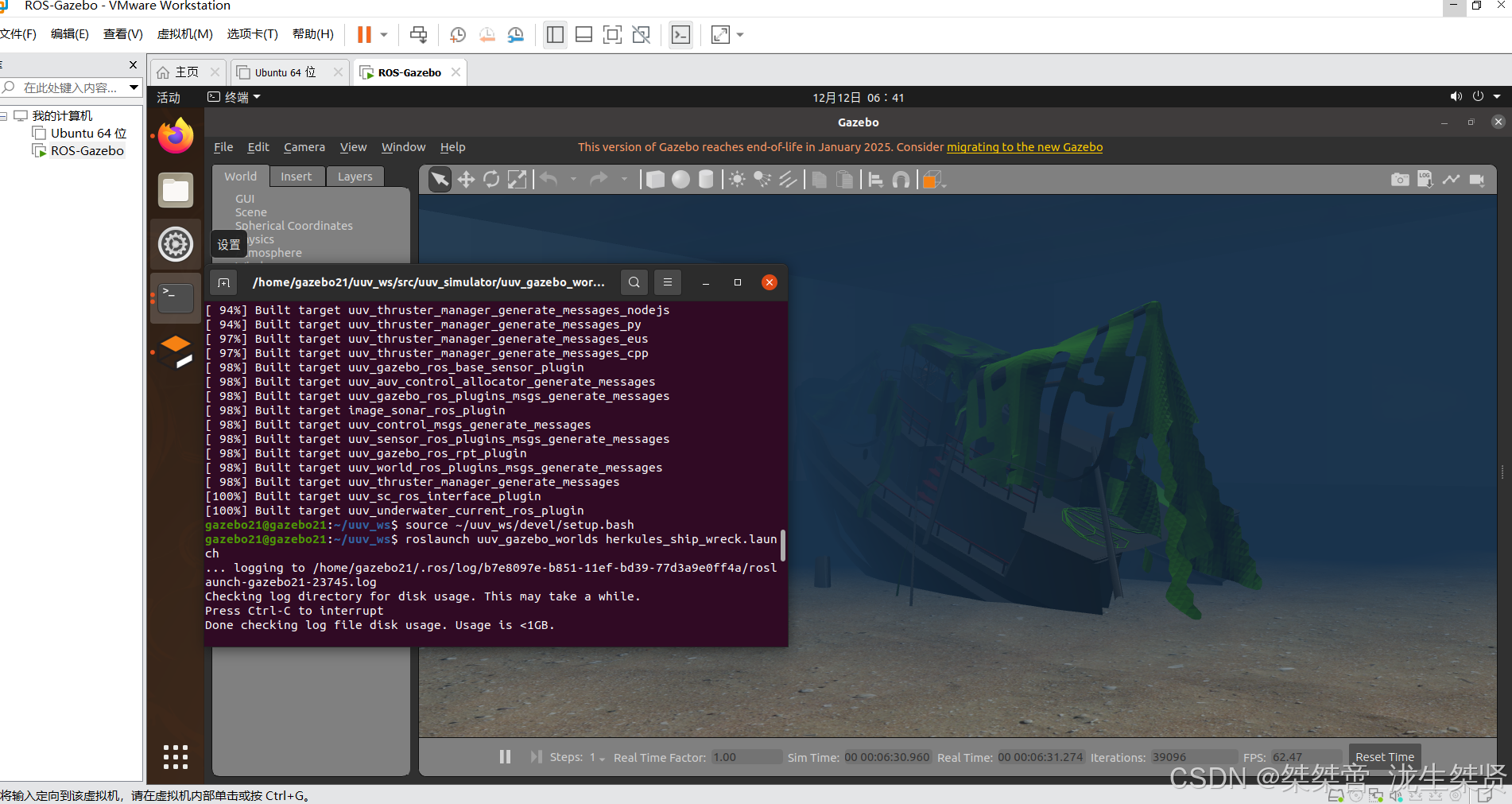
启动赫尔库勒斯沉船的世界执行命令:
roslaunch uuv_gazebo_worldsherkules_ship_wreck.launch
启动湖泊
roslaunch uuv_gazebo_worlds lake.launch
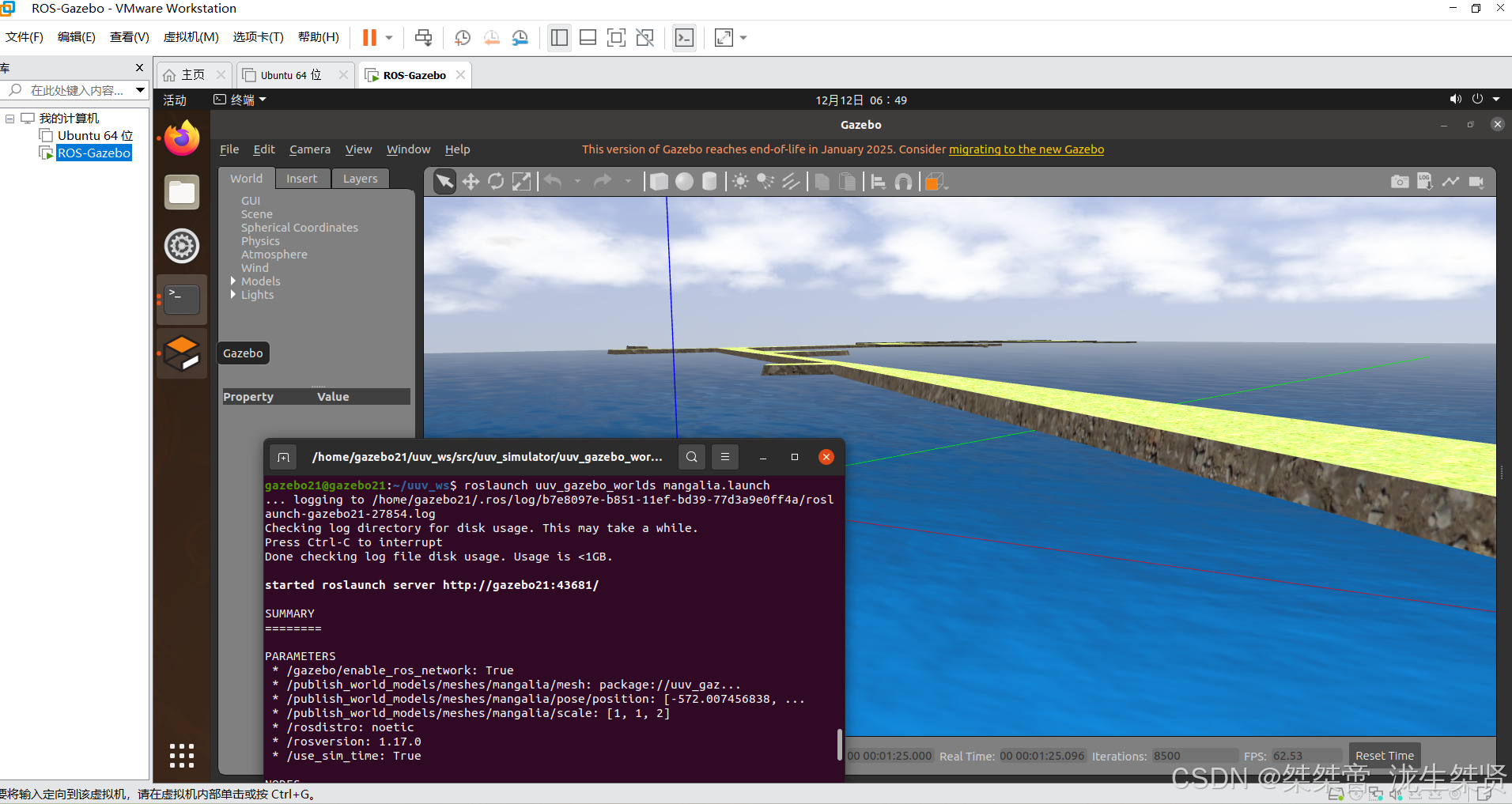
启动红土大陆
roslaunch uuv_gazebo_worlds mangalia.launch
启动孤岛田园
roslaunch uuv_gazebo_worlds munkholmen.launch

启动深海丘陵
roslaunch uuv_gazebo_worlds ocean_waves.launch

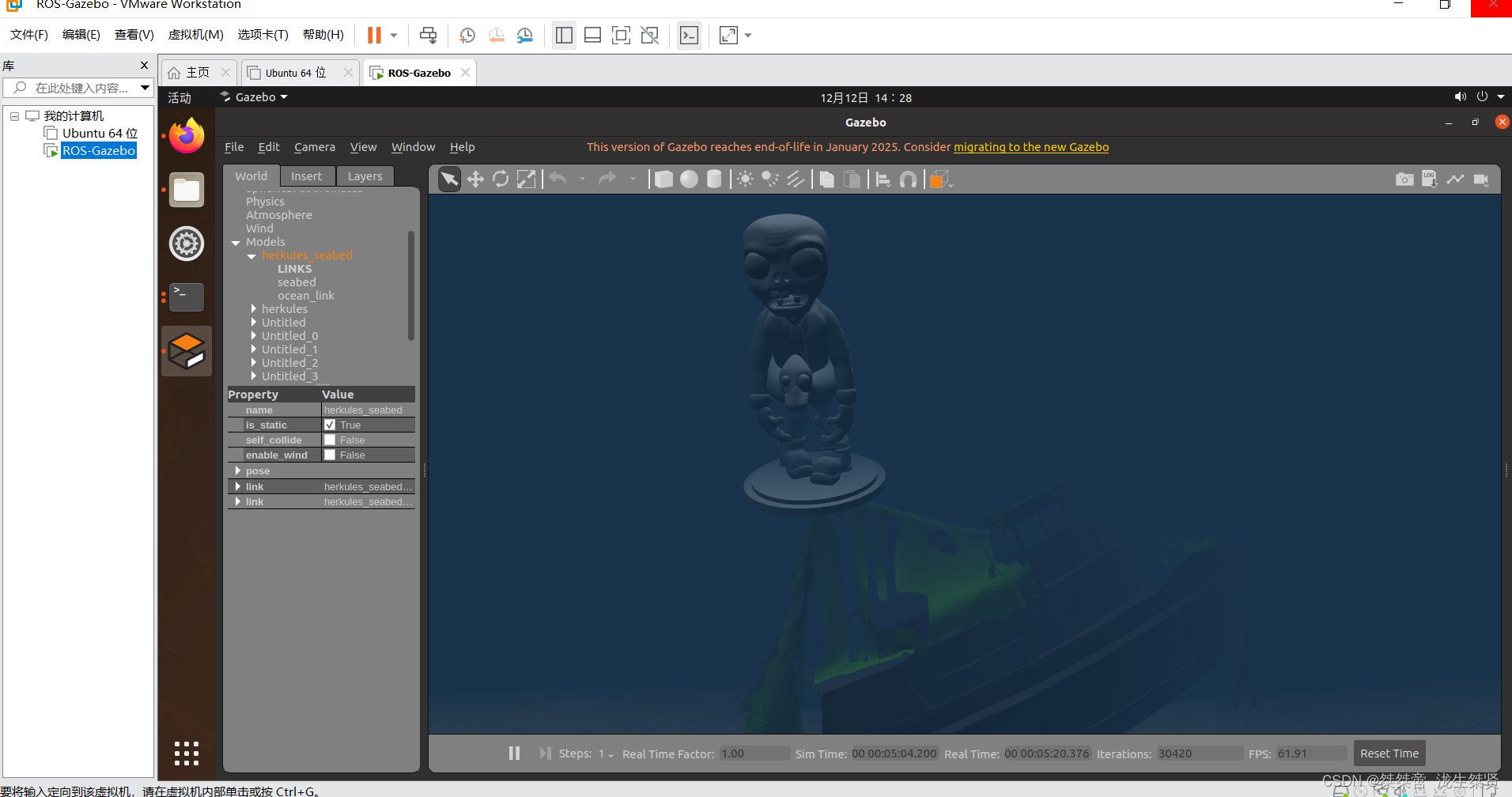
stl模型导入
将模型加载到模型器,更改stl模型尺寸为千分之一(或其他尺寸)再File->Save As,保存该stl模型为sdf文件。然后在保存路径会出现sdf文件和config文件。
将stl模型文件与sdf,config文件全部移动到.gazebo文件夹中的models文件夹中。
然后更改sdf文件中的 url路径改为当前路径
最后在Gazebo的世界编辑器中,点击左上方的Insert栏,点击Add Path,选择刚才保存模型的文件夹,将模型拖出来/或选择点出。

将stl模型设定网格节点,用以机器控制。
详见大佬链接:
【机器人学习--Gazebo学习--模型库和编辑模型 - 优快云 App】https://blog.youkuaiyun.com/GGY1102/article/details/114818949?sharetype=blog&shareId=114818949&sharerefer=APP&sharesource=2302_77374043&sharefrom=link
启动赫尔库勒斯沉船的世界执行命令,将模型拖出来。
启动键盘控制:
rosrun uuv_simulation keyboard_vel_ctrl
8. rosdep初始化问题(承接上上面的sudo rosdep init
rosdep update问题)
(大佬原链接如下):
Ubuntu 20.04LTS安装ROS及rosdep初始化问题-优快云博客
1. 修改 sources_list.py 文件
sudo nano /usr/lib/python3/dist-packages/rosdep2/sources_list.py
- 打开上述文件后,download_rosdep_data函数中增加一行代理服务器语句:
Lameduck. 我自己需要记住的傻瓜步骤
1.启动终端运行
roscore
{校内机房还要另外配置ifconfig,edit ~/.bashrc(127.0.0.1),export master,export hostname,source ~/.bashrc}
2.另外启动一个新终端
1.编译工作空间:
cd ~/uuv_ws
catkin_make
2.设置环境变量:
source ~/uuv_ws/devel/setup.bash
3.启动仿真场景:
roslaunch uuv_gazebo_worlds auv_underwater_world.launch

















 1980
1980

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









