




 这篇博客介绍了ROS中的Service_Demo,通过创建两个节点实现请求与响应的交互。一个节点作为服务提供者,接收包含姓名和年龄的自定义请求并返回反馈。详细步骤包括创建package、定义srv文件、编写server和client代码,以及配置CMakeLists.txt和package.xml。
这篇博客介绍了ROS中的Service_Demo,通过创建两个节点实现请求与响应的交互。一个节点作为服务提供者,接收包含姓名和年龄的自定义请求并返回反馈。详细步骤包括创建package、定义srv文件、编写server和client代码,以及配置CMakeLists.txt和package.xml。
Service_Demo
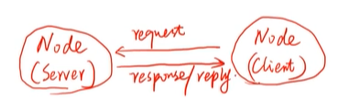
功能描述:两个node,一个发布请求(格式自定义),另一个接收处理该信息,并返回信息。
步骤:
- package
- srv
- server.cpp
- client.cpp
- CMakeLists.txt&package.xml
1.package
cd ~ /catkin_ws/src
catkin_create_pkg service_demo roscpp rospy std_msgs
2.srv
cd service_demo/
mkdir srv
cd srv
vi Greeting.srv
Greeting.srv(请求方把自己的姓名和年龄发给server,server收到信息后给出一个反馈)
string name
int32 age
---
string feedback
编译之后生成对应的头文件 ~/catkin_ws/devel/include/service_demo/Greeting.h
…
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2021
2021

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









