




 这篇博客详细介绍了ROS中的topic_demo应用,通过创建两个节点,一个发布模拟GPS消息,另一个进行接收和处理,计算距离。教程涵盖从package创建到CMakeLists和msg定义的完整过程。
这篇博客详细介绍了ROS中的topic_demo应用,通过创建两个节点,一个发布模拟GPS消息,另一个进行接收和处理,计算距离。教程涵盖从package创建到CMakeLists和msg定义的完整过程。
topic_demo
功能描述:两个node,一个发布模拟的GPS消息(格式为自定义,包括坐标和工作状态),另一个接收并处理该信息(计算到原点的距离)
步骤:
1.package
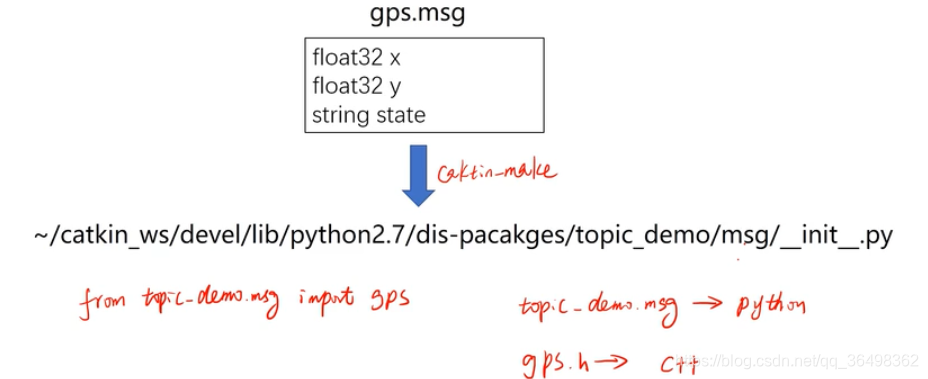
2.msg
3.talker.cpp
4.listener.cpp
5.CMakeList.txt&package.xml
3.pylistener.py
import rospy
import math
from topic_demo.msg import gps
def callback(gps):
distance = math.sqrt(math.pow(gps.x,2)+math.pow(gps.y,2))
rospy.loginfo 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2192
2192

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









