







引言
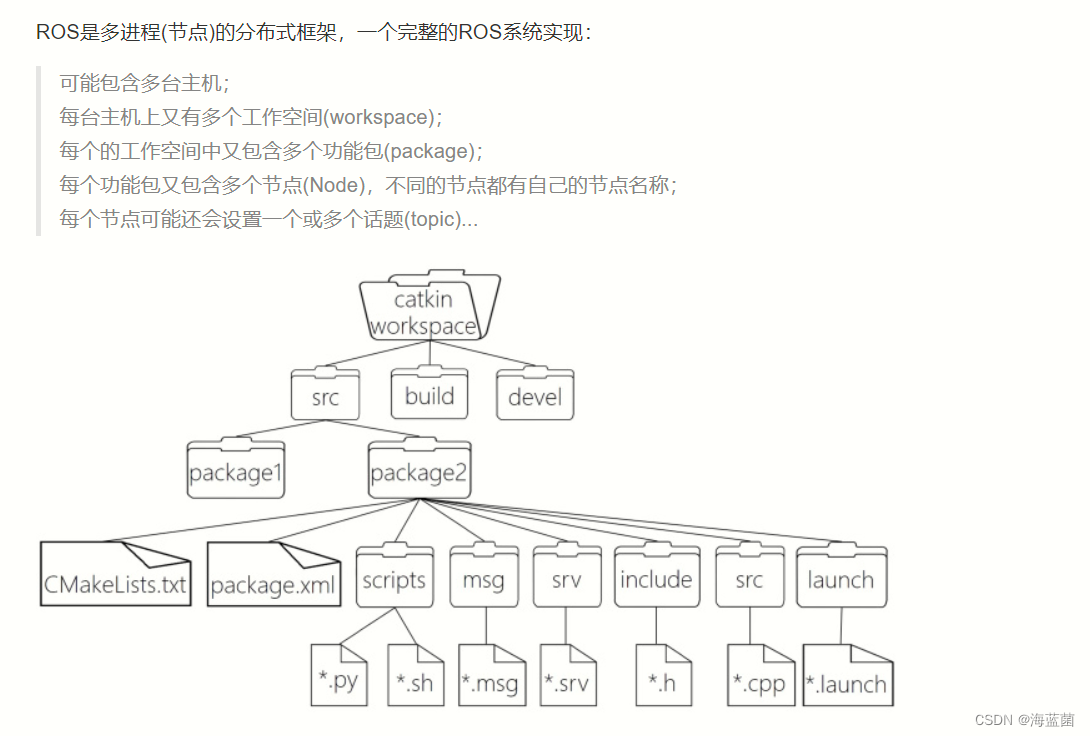
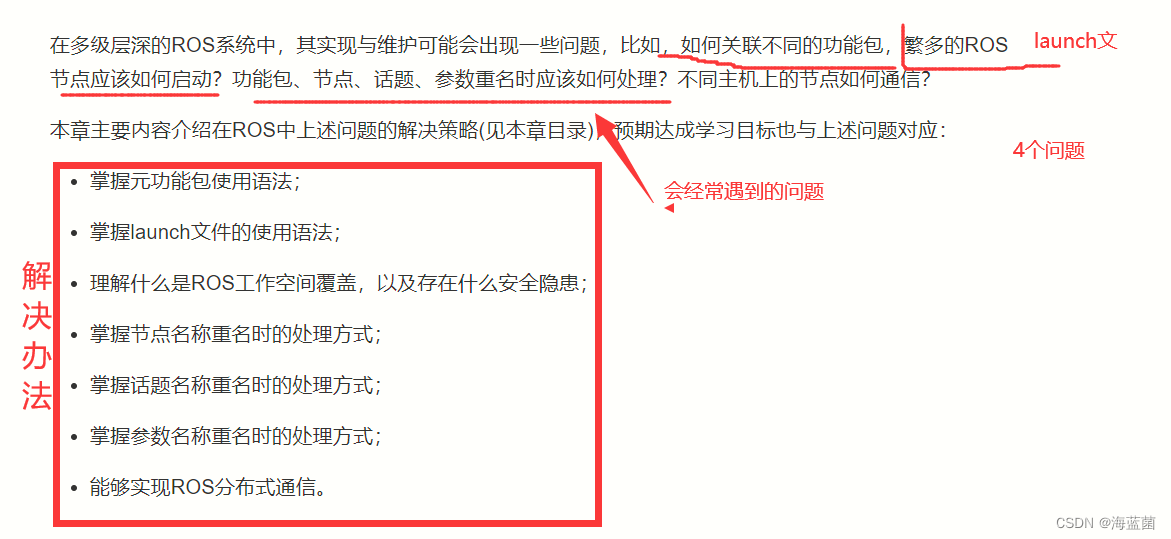
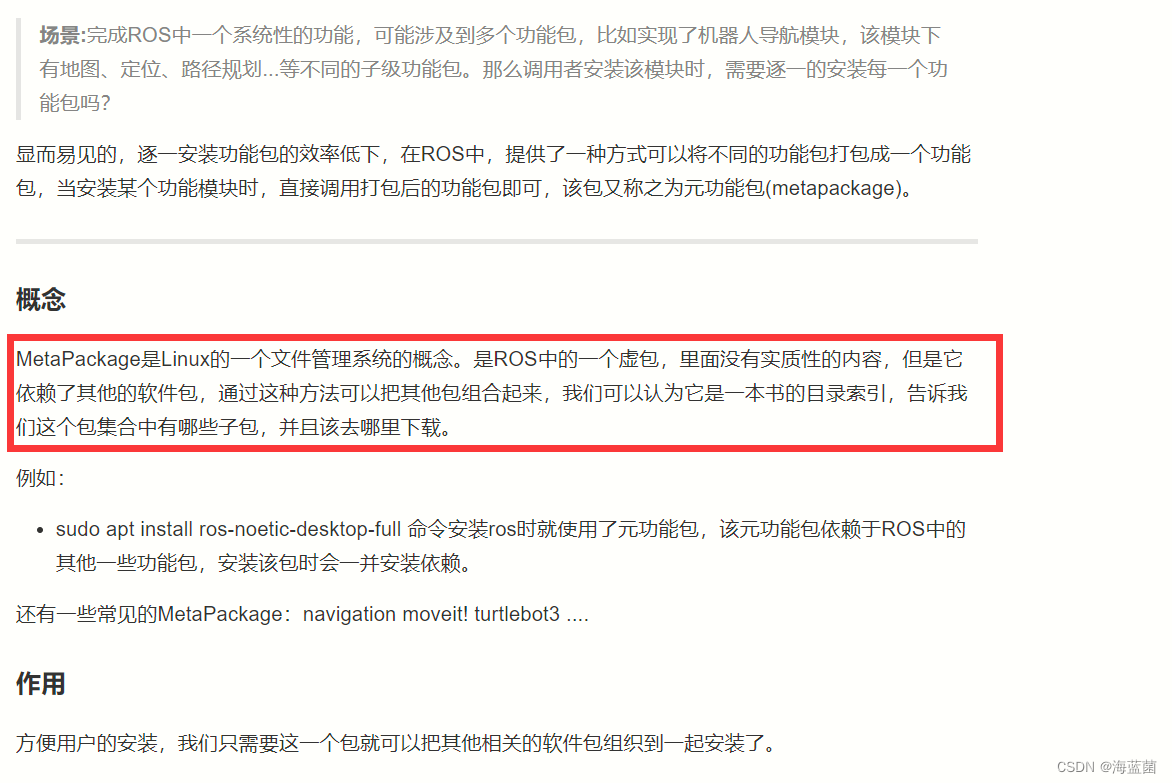
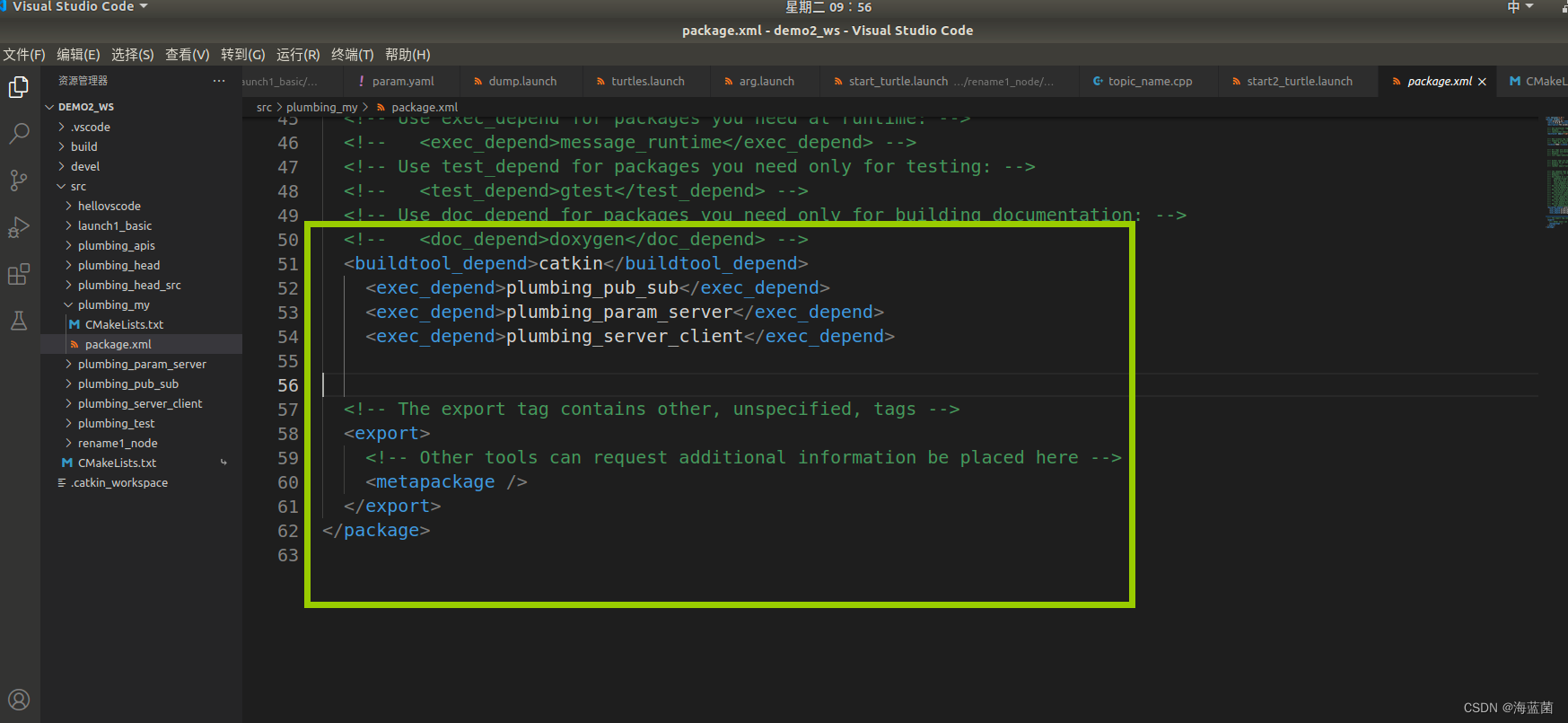
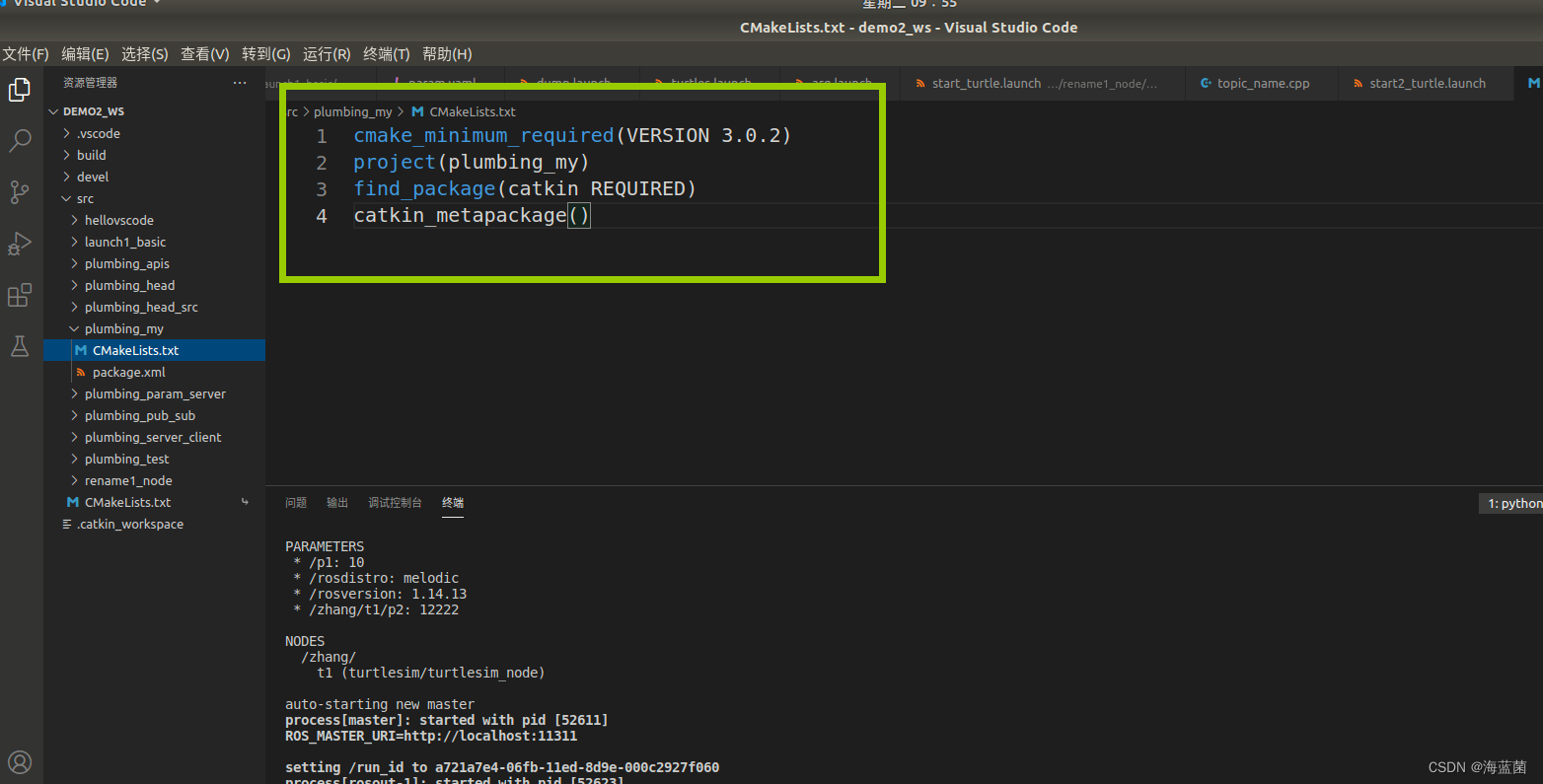
4.1 ROS元功能包
新建元功能包时可以不添加任何依赖

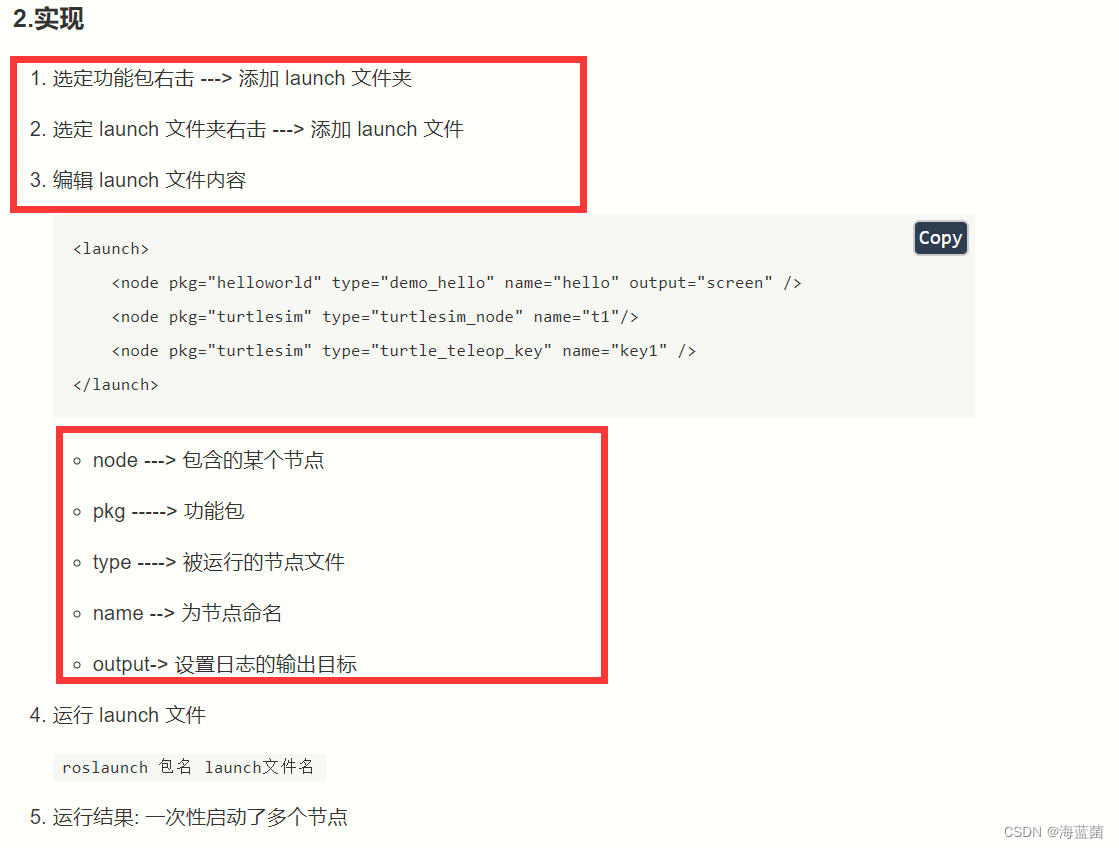
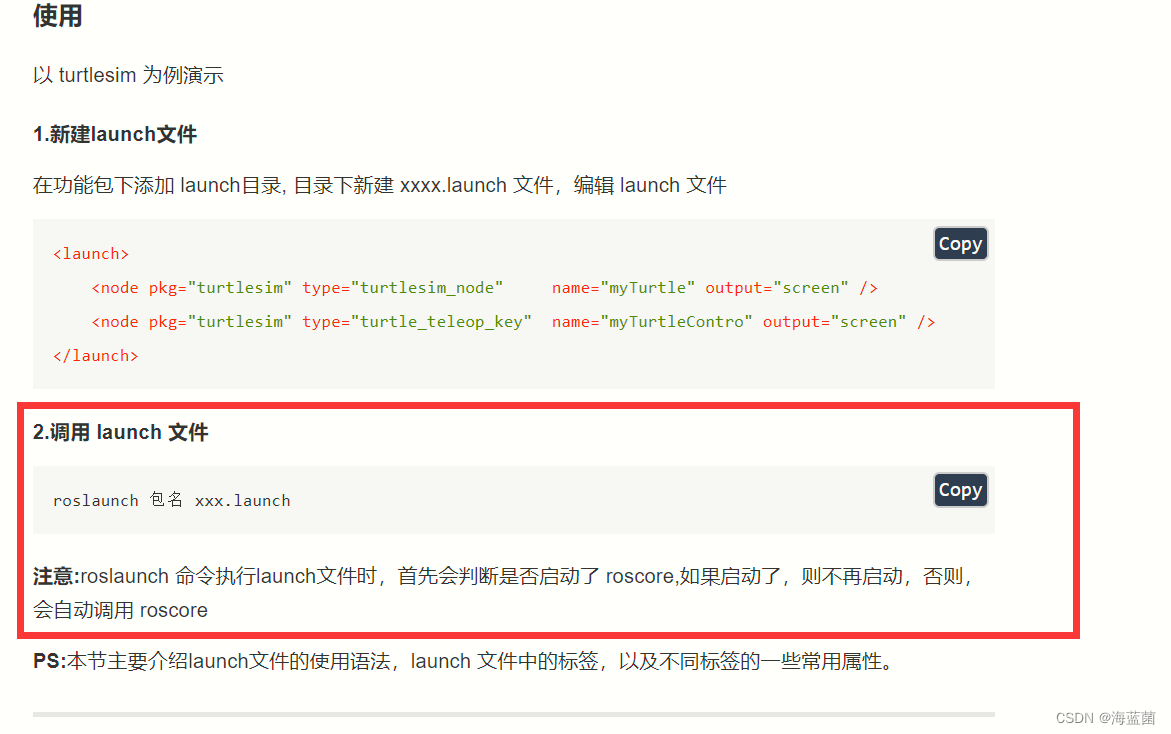
4.2 ROS节点运行管理launch文件
、
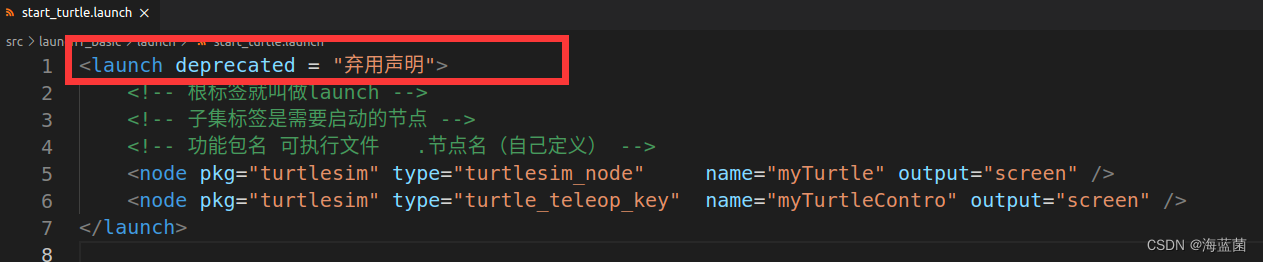
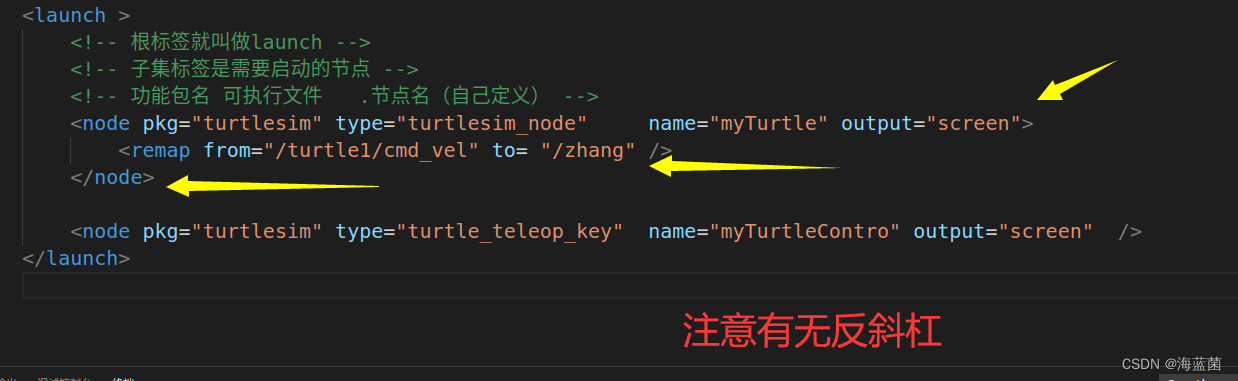
4.2.1 launch文件标签之launch

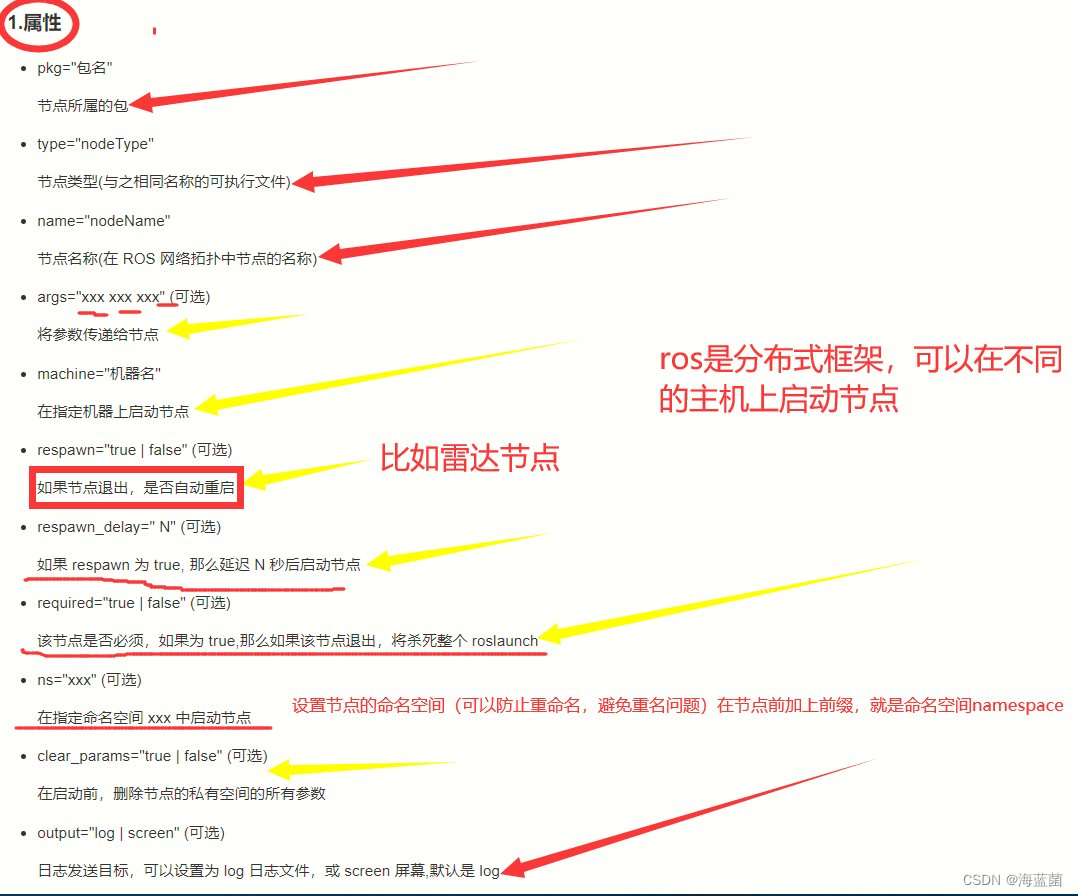
4.2.2 launch文件标签之node
标签用于指定 ROS 节点,是最常见的标签,需要注意的是: roslaunch 命令不能保证按照 node 的声明顺序来启动节点(节点的启动是多进程的)
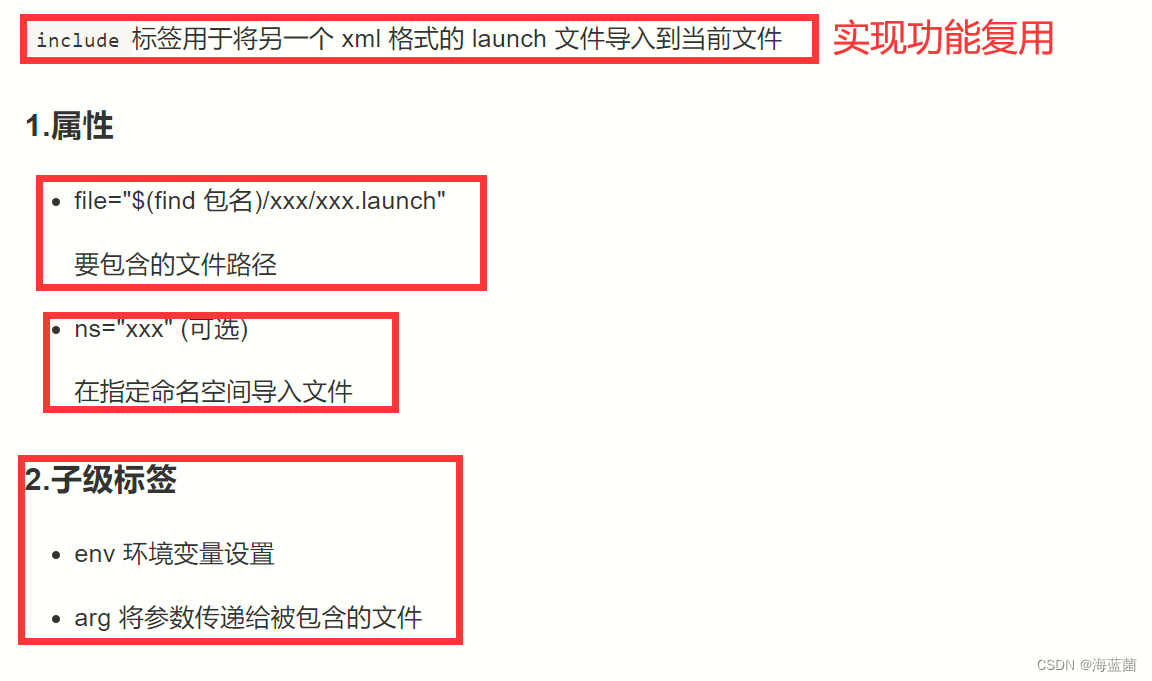
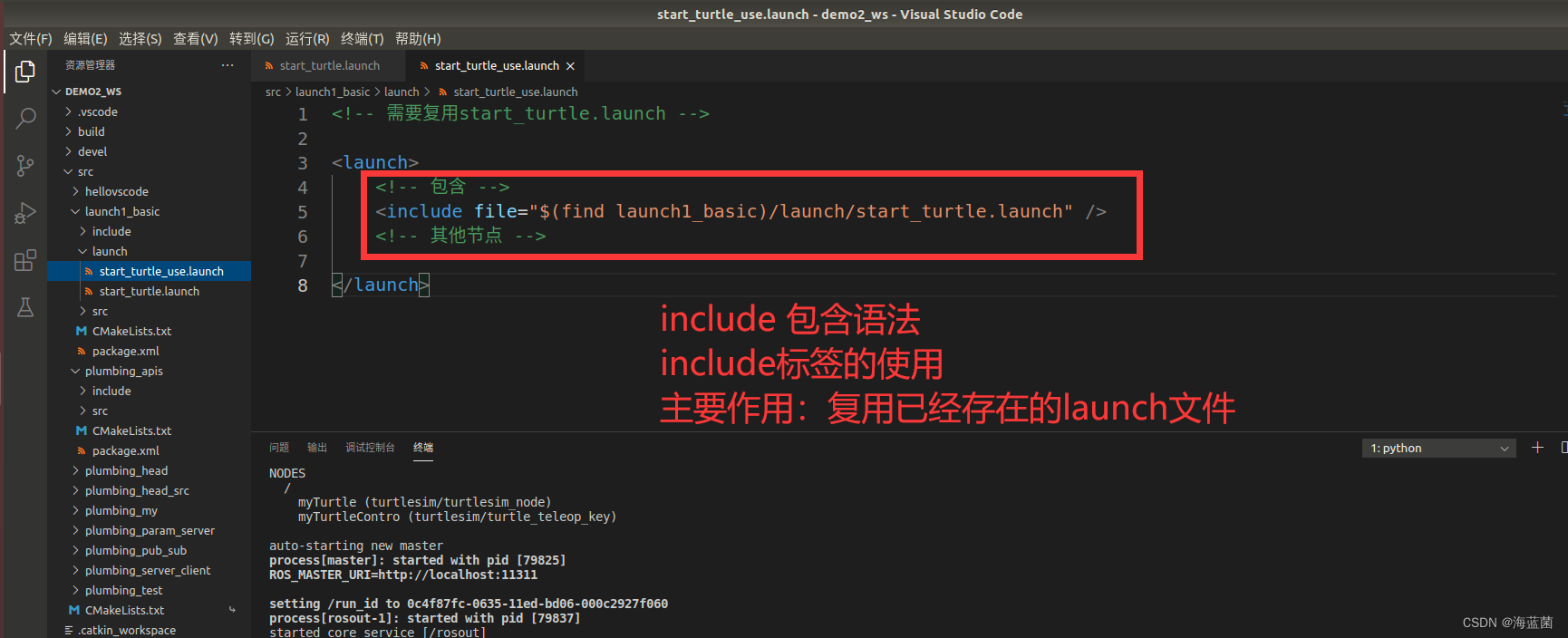
4.2.3 launch文件标签之include
4.2.4 launch文件标签之remap

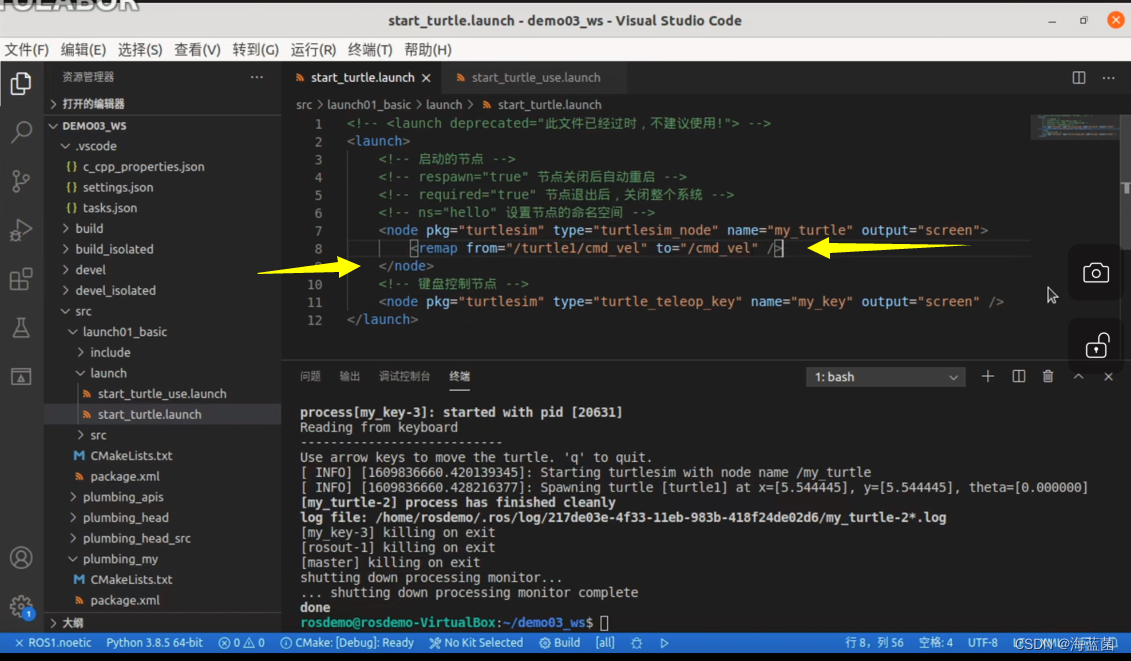
关于话题 只要某个节点运行后,其中的话题名称都可以通过rostopic list列举出来
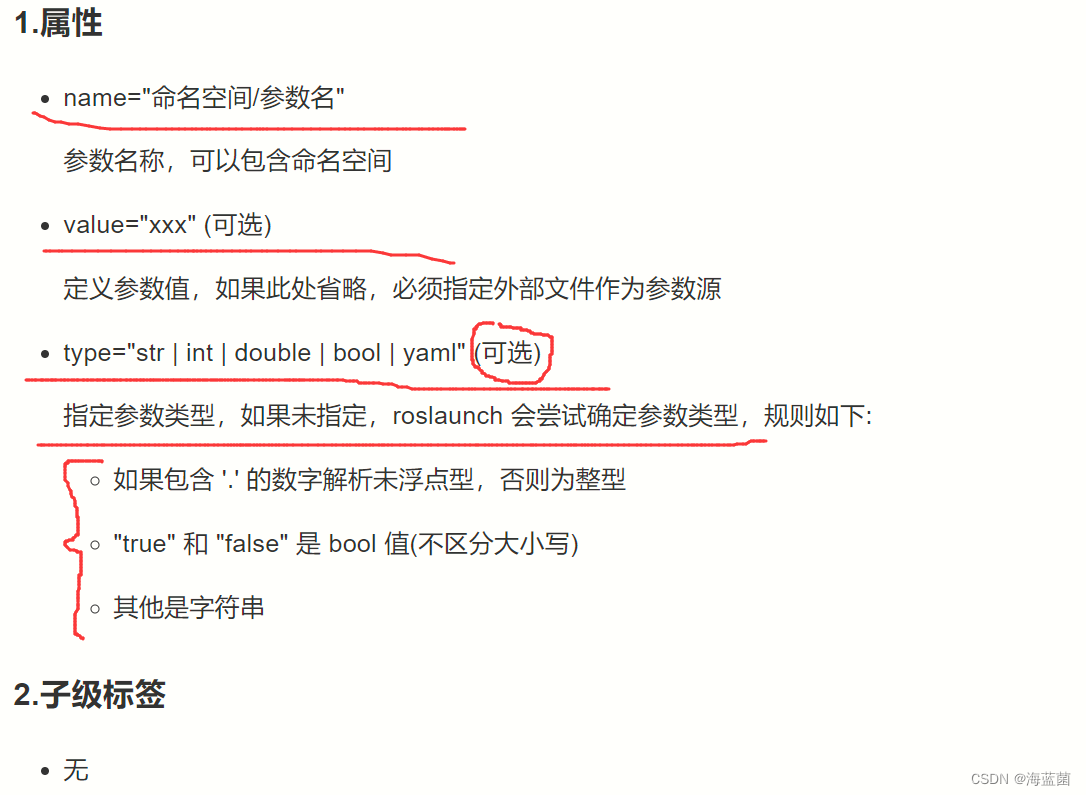
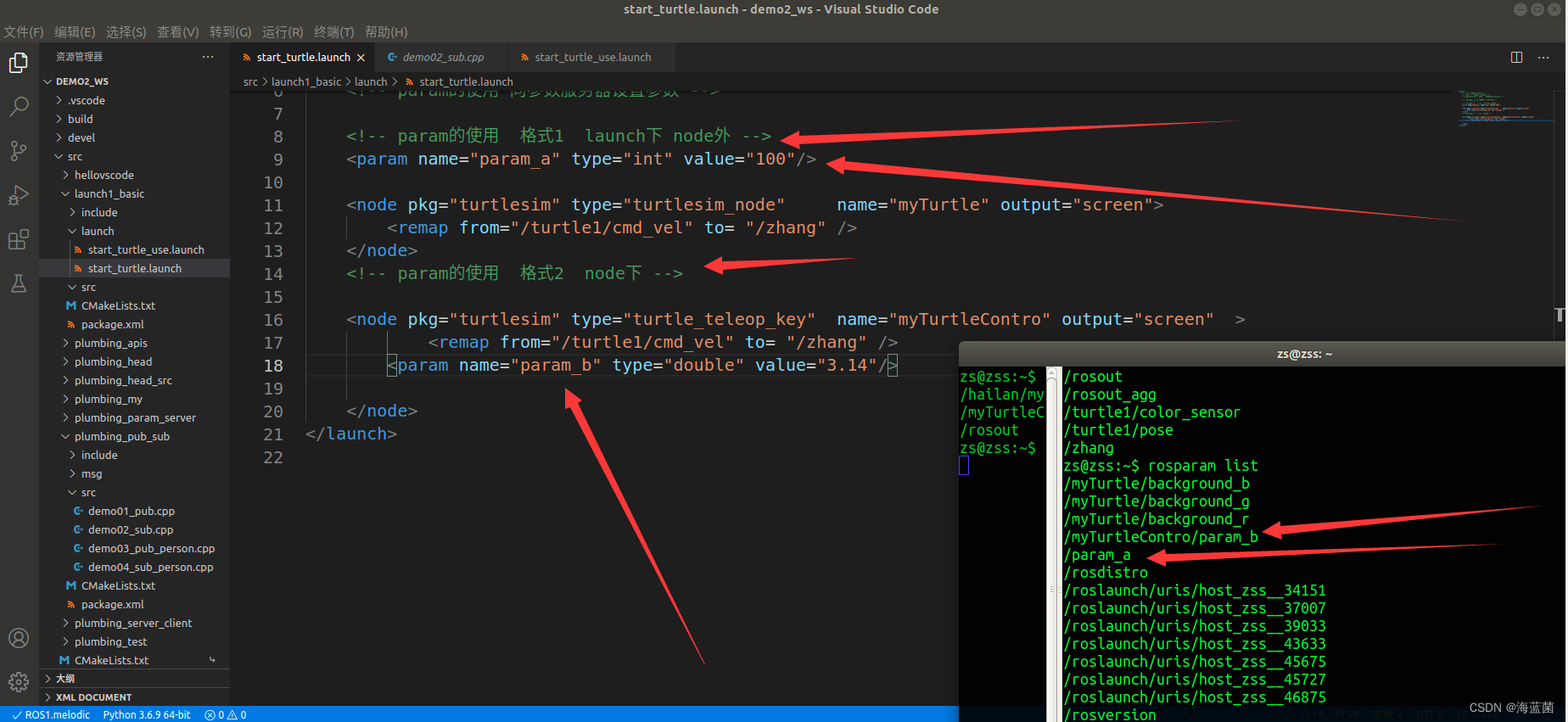
4.2.5 launch文件标签之param
有两种方式
1.声明在launch标签下
2.生命在node下

4.2.6 launch文件标签之rosparam
YAML文件
加载 导出 删除
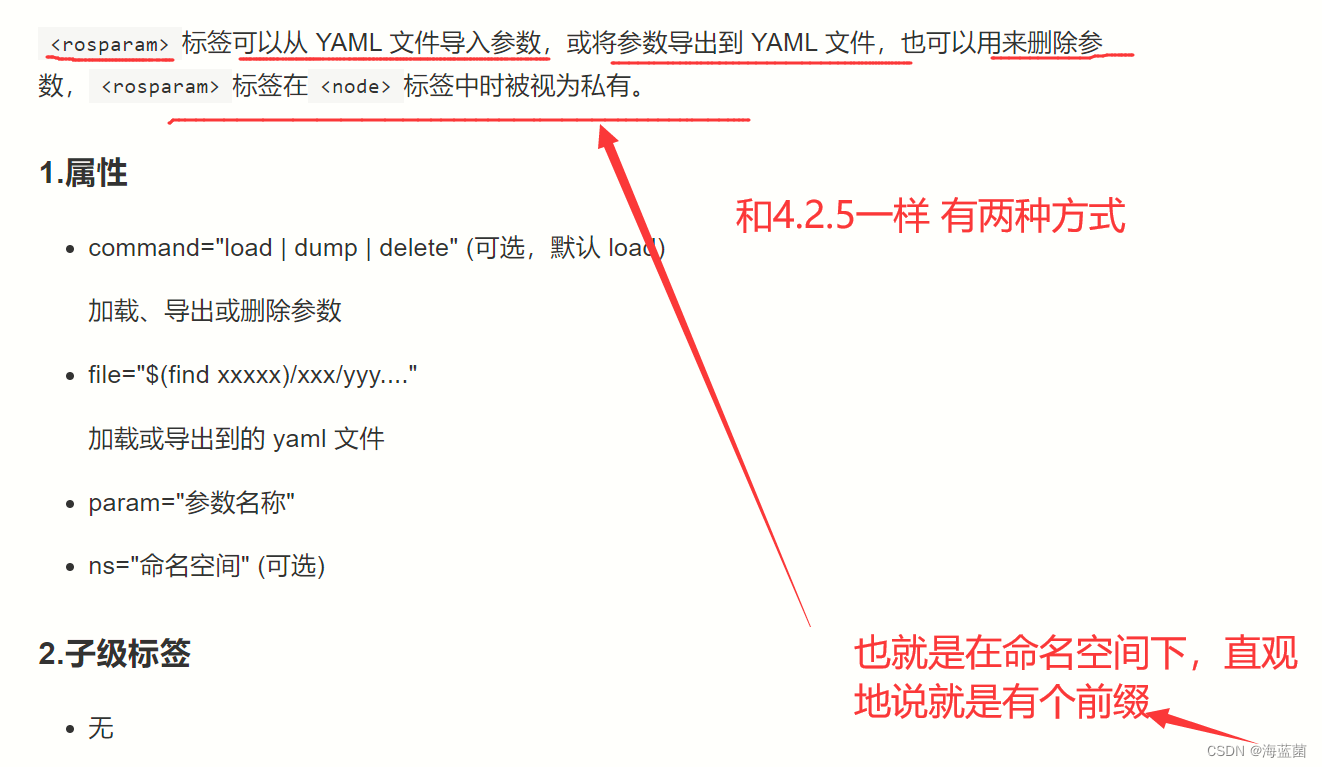
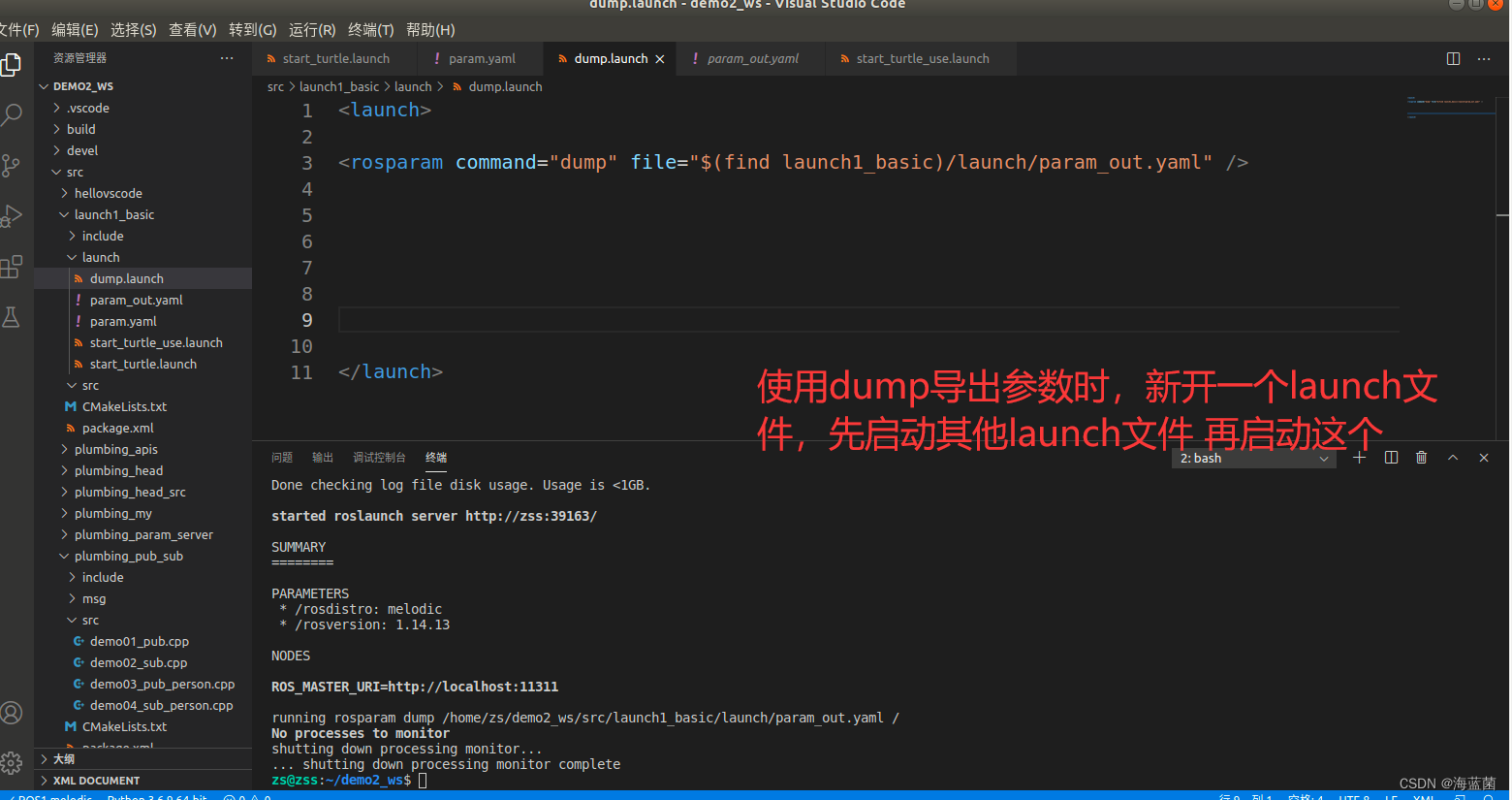
(需要新开终端窗口)
4.2.7 launch文件标签之group
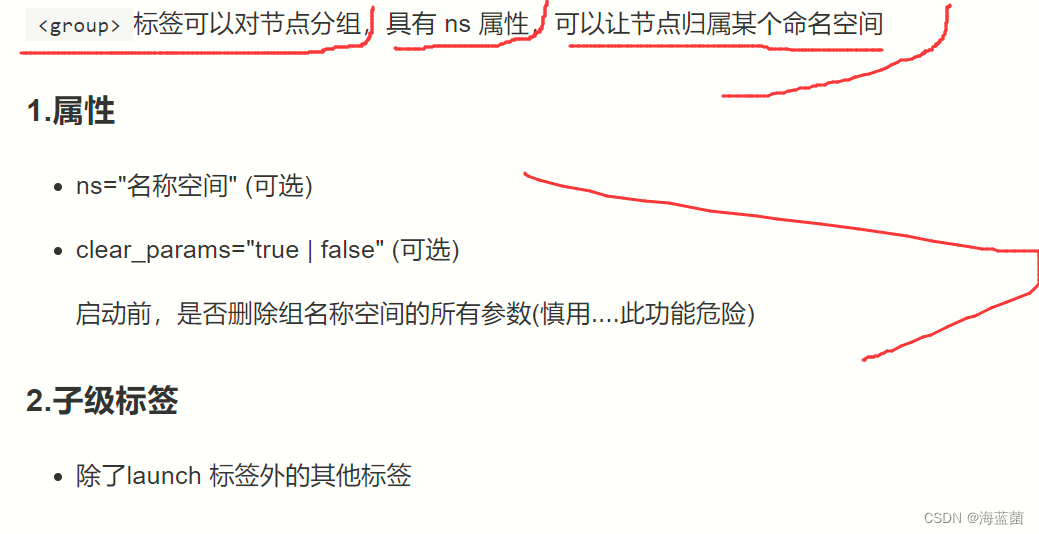
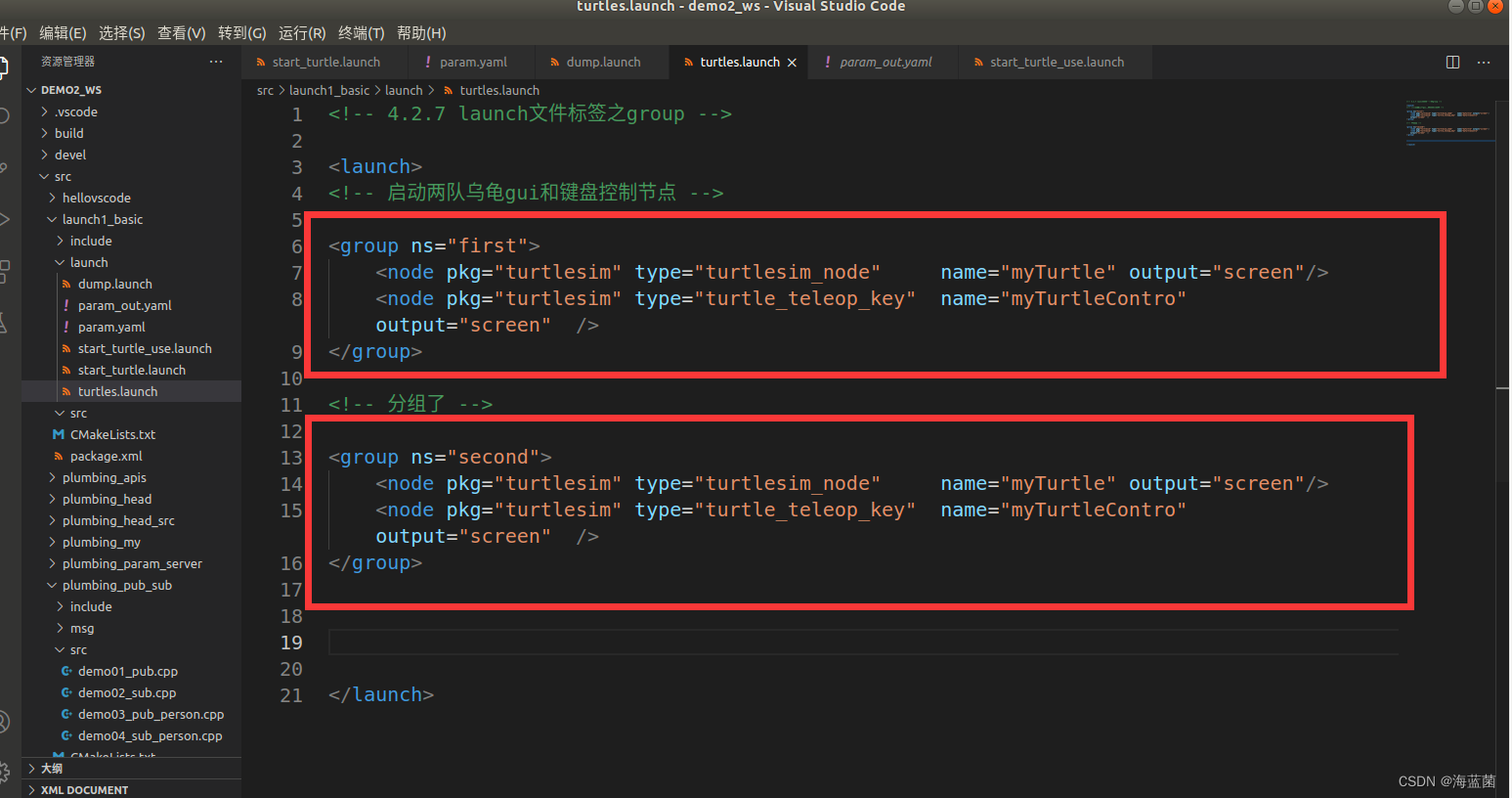
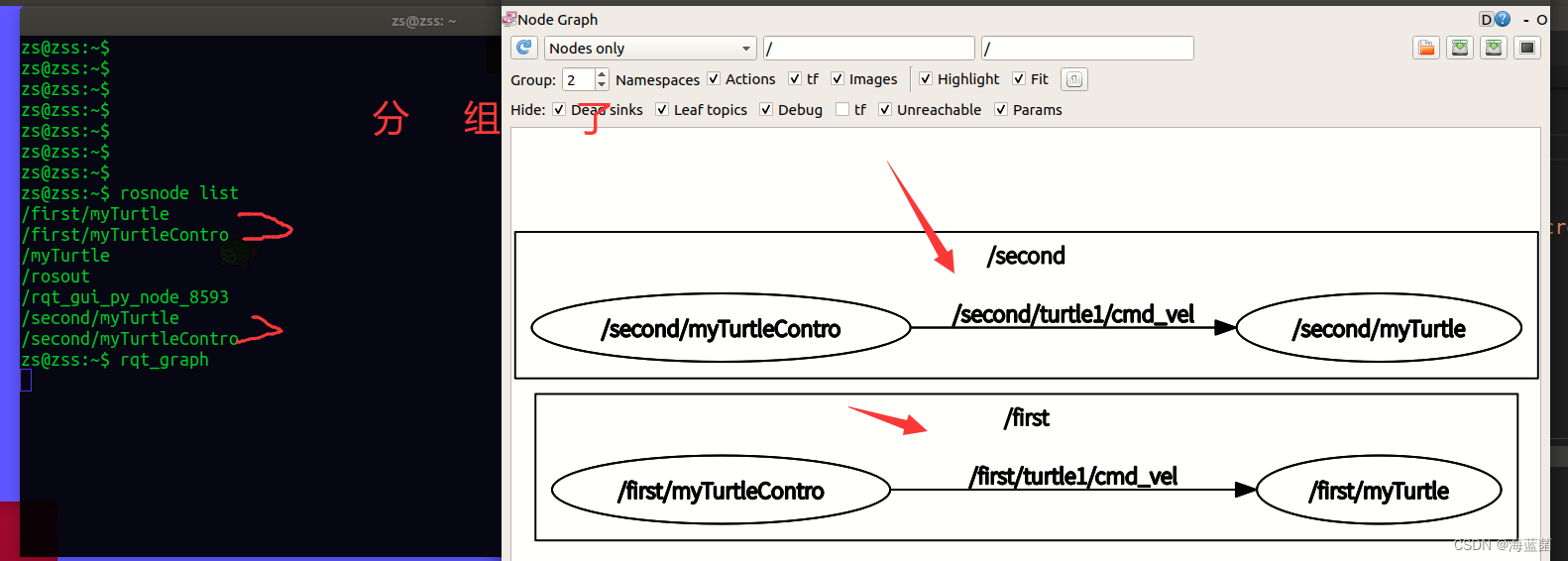
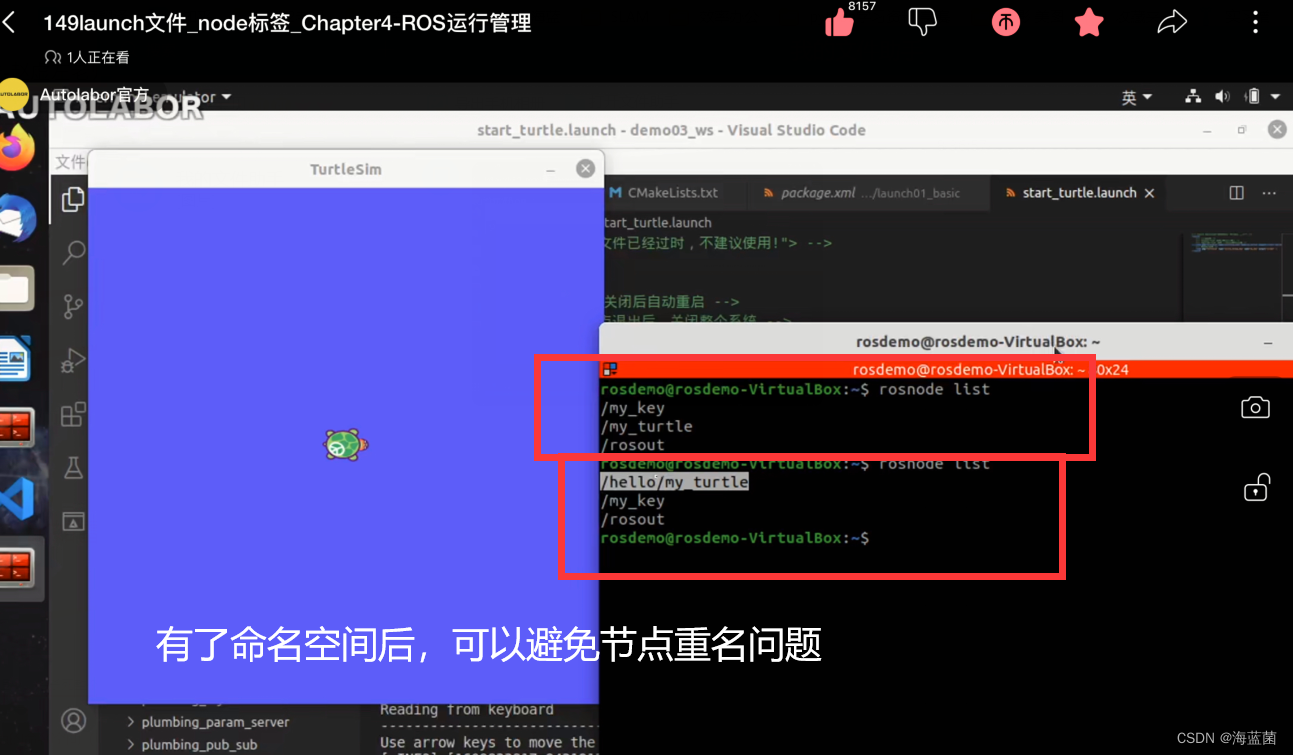
组的使用,当节点比较多的时候,我们可以分组管理。让ros中的层级结构看上去更加清晰,另外 通过ns的设置,可 以 避 免 重 名 问 题
4.2.8 launch文件标签之arg(参数)
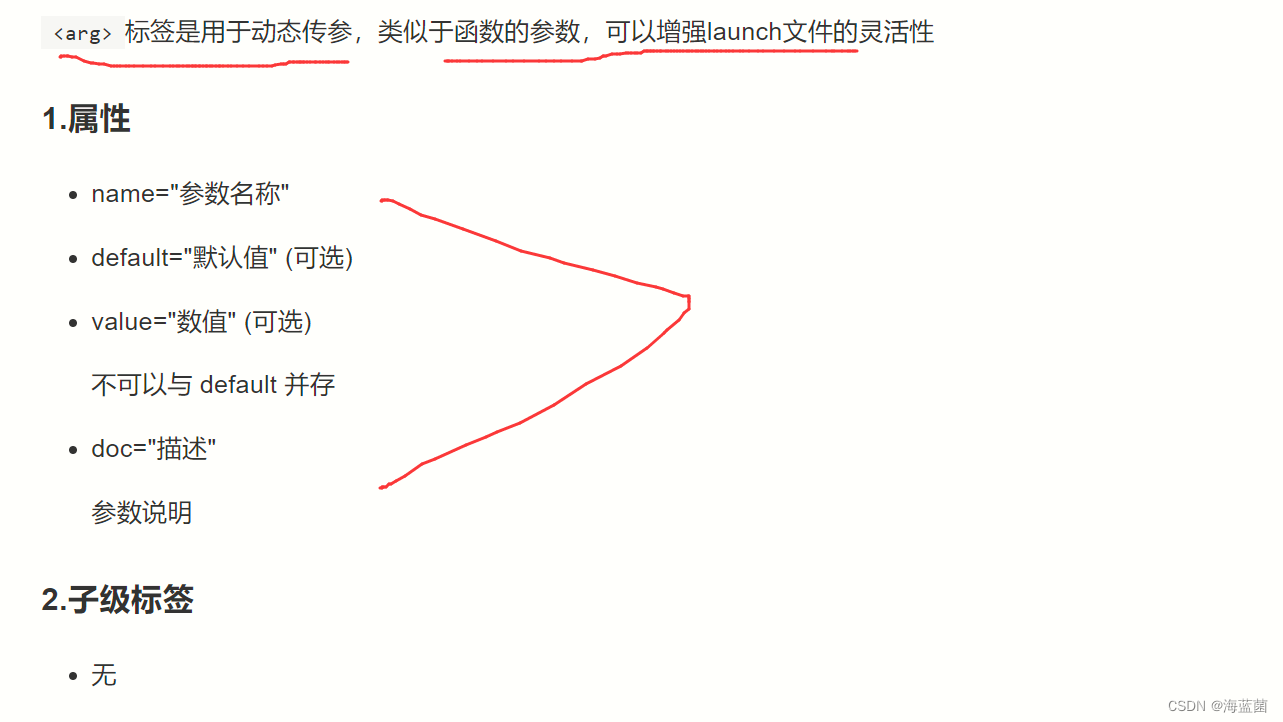

解决重名问题
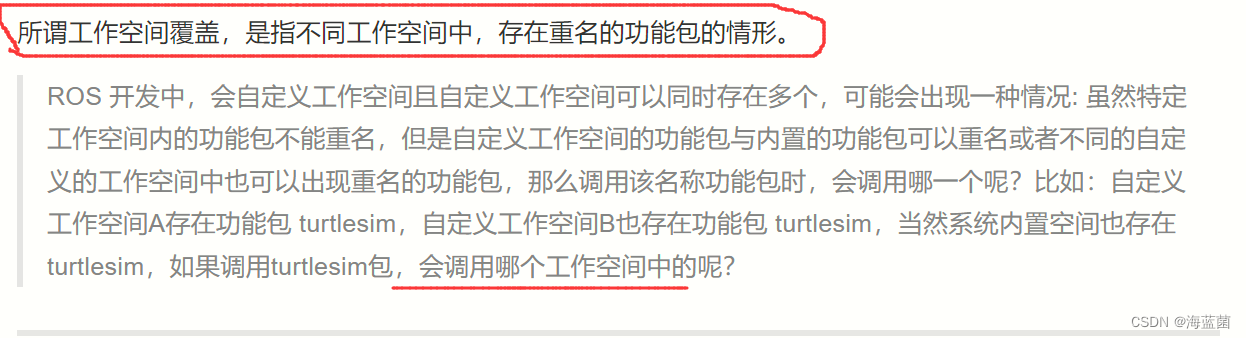
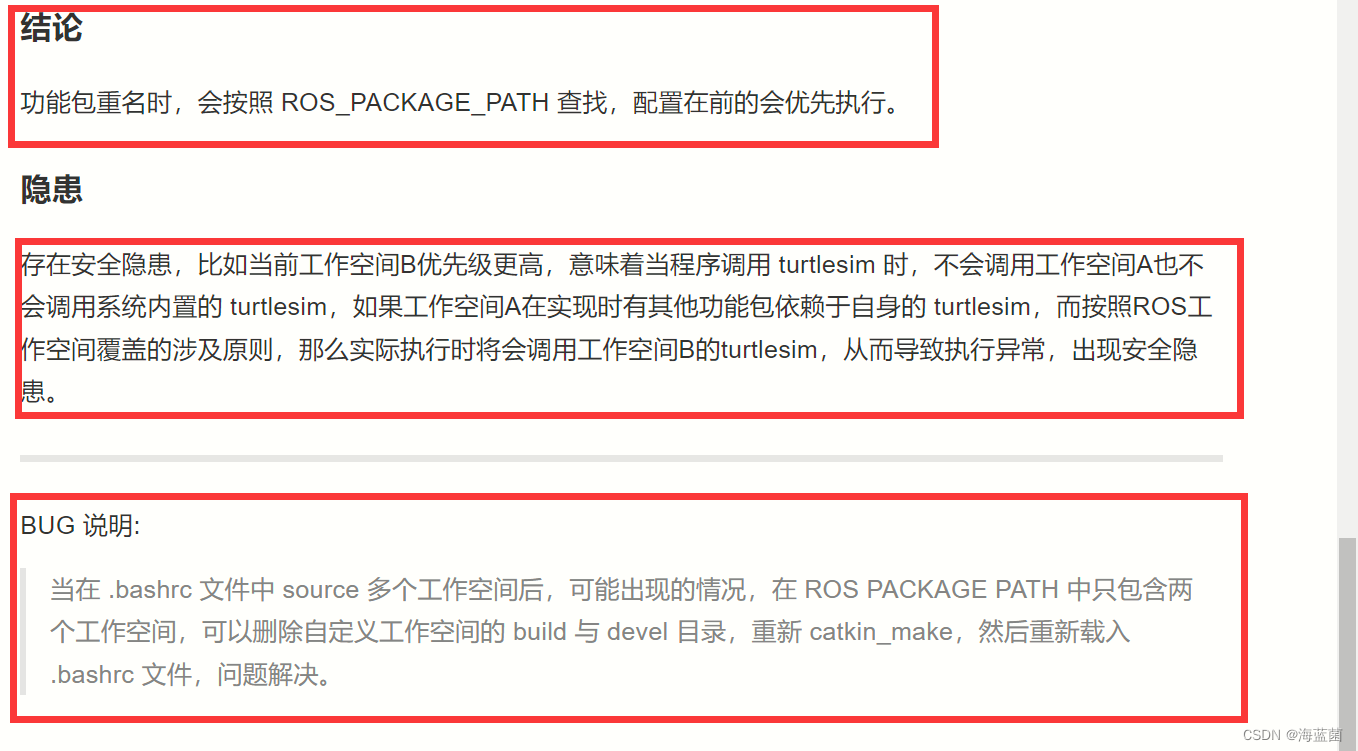
4.3 ROS工作空间覆盖(功能包的重名——P156)
有安全隐患 要尽量避免这种情况
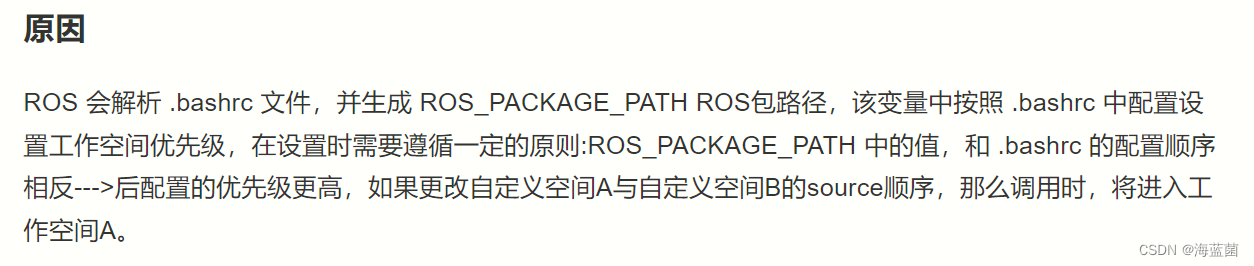
最后刷新环境变量的 优先级最高
解决重名问题
联系现实生活中一个班级重名的问题解决方法,解决这类问题主要有两种方法:(对节点 话题 参数均适用)
1.起别名
2.加前缀(这里叫做命名空间 namespace)
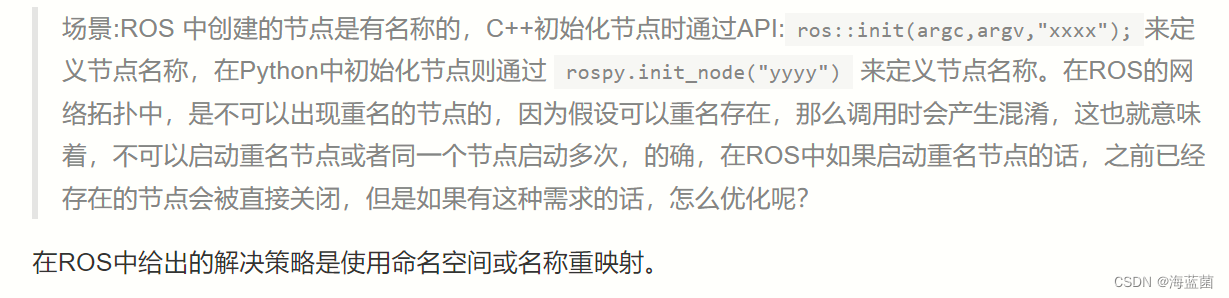
4.4 ROS节点名称重名
联系现实生活中一个班级重名的问题解决方法,解决这类问题主要有两种方法:
1.起别名
2.加前缀(这里叫做命名空间 namespace)
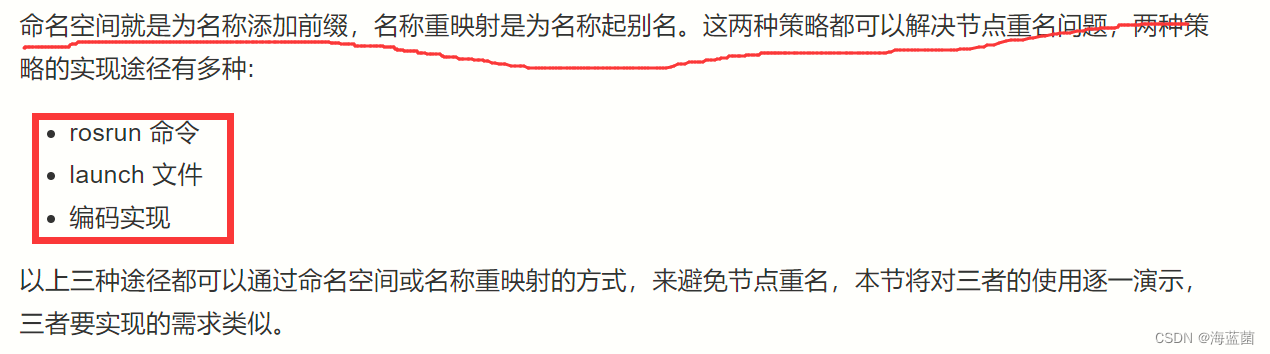
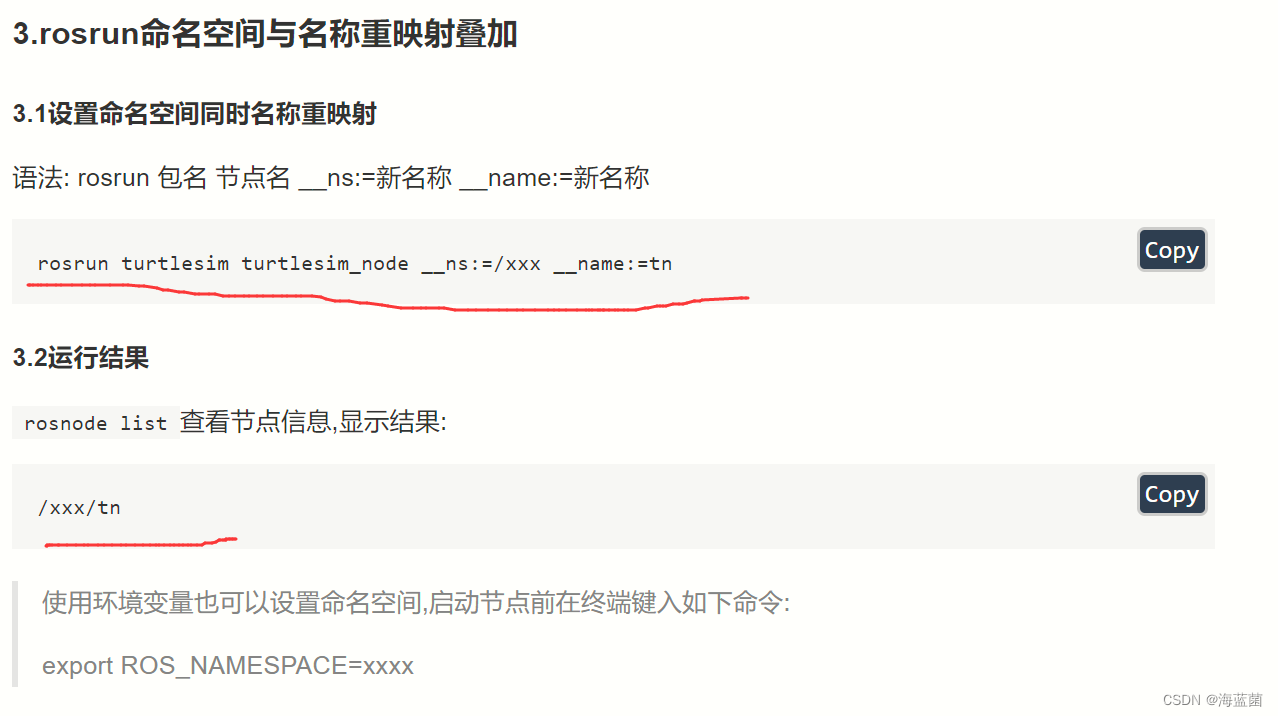
4.4.1 rosrun设置命名空间与重映射


rosrun turtlesim turtlesim_node __name:=t1
rosrun turtlesim turtlesim_node __name:=t2
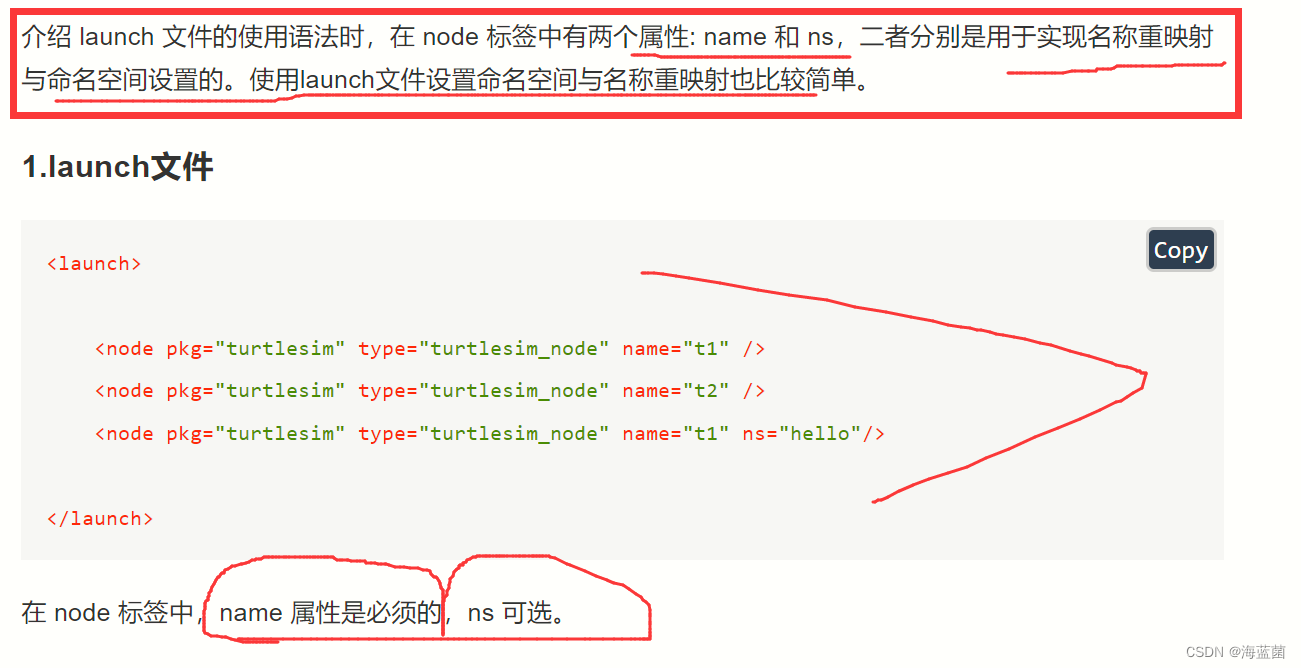
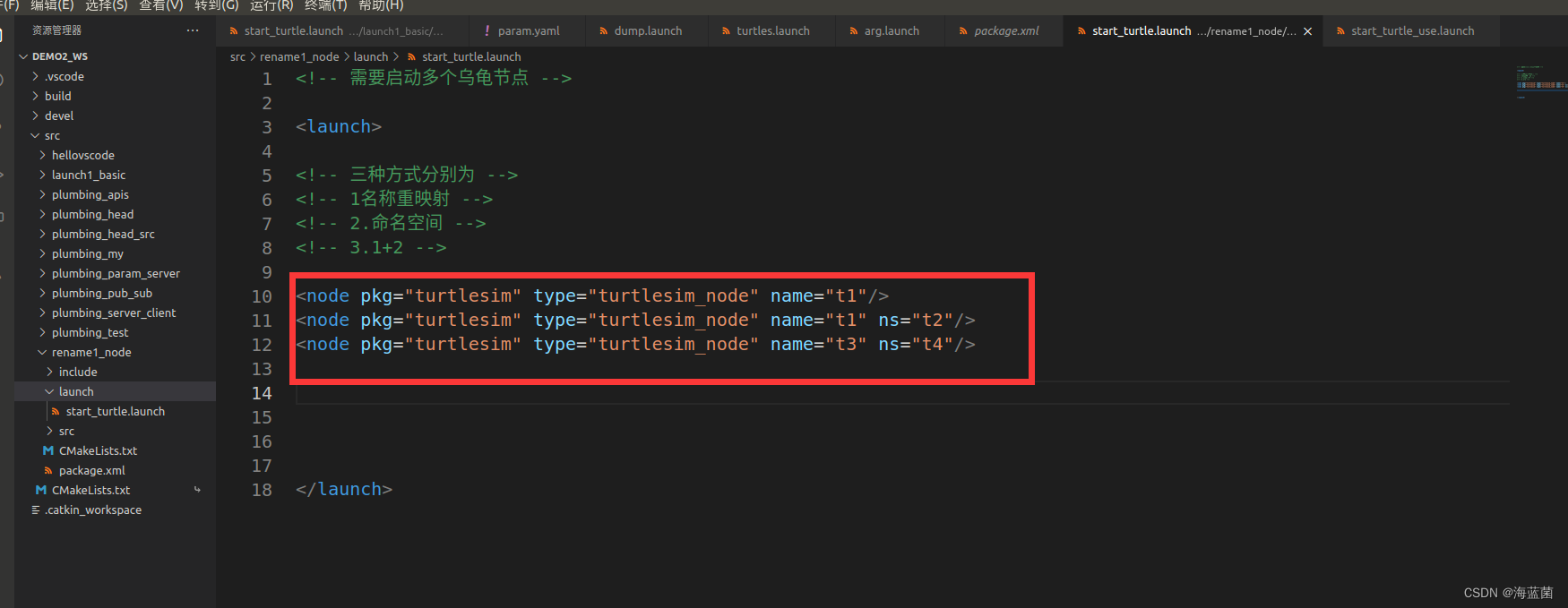
4.4.2 launch文件设置命名空间与重映射
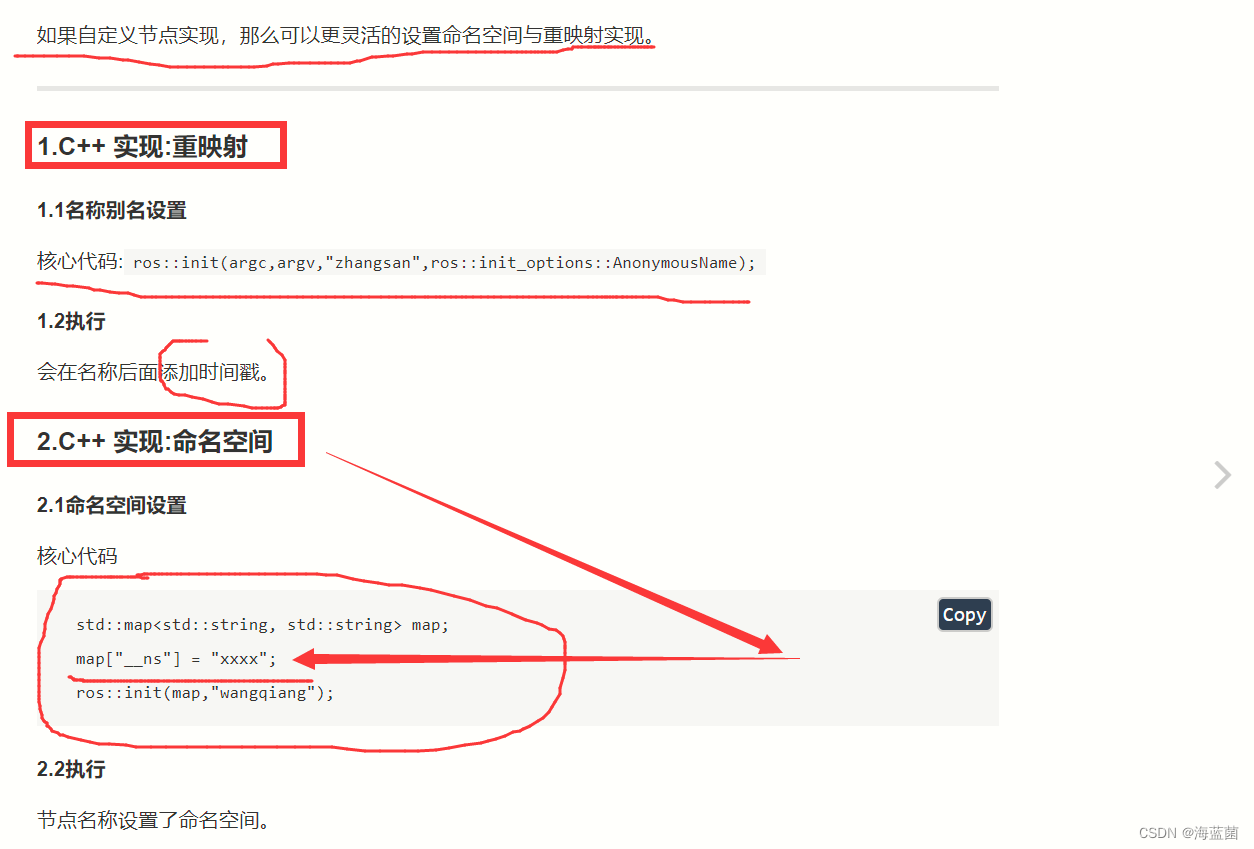
4.4.3 编码设置命名空间与重映射
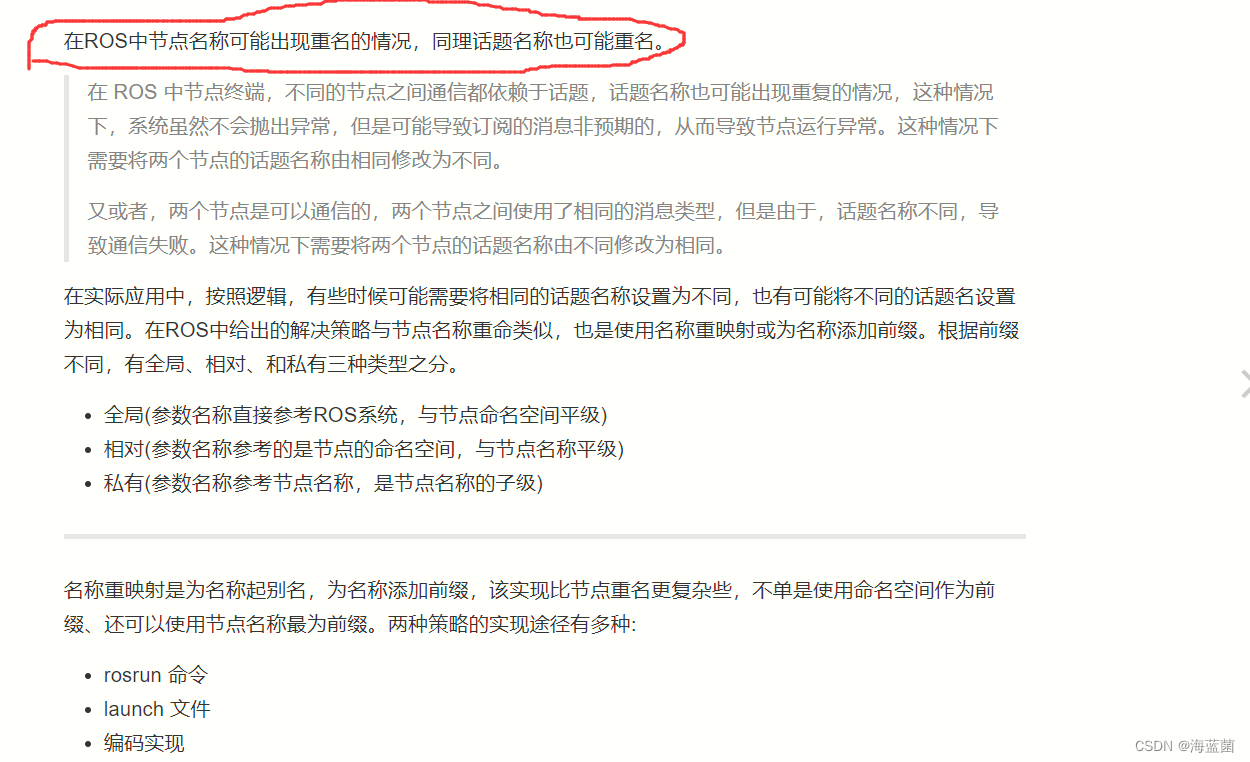
4.5 ROS话题名称设置
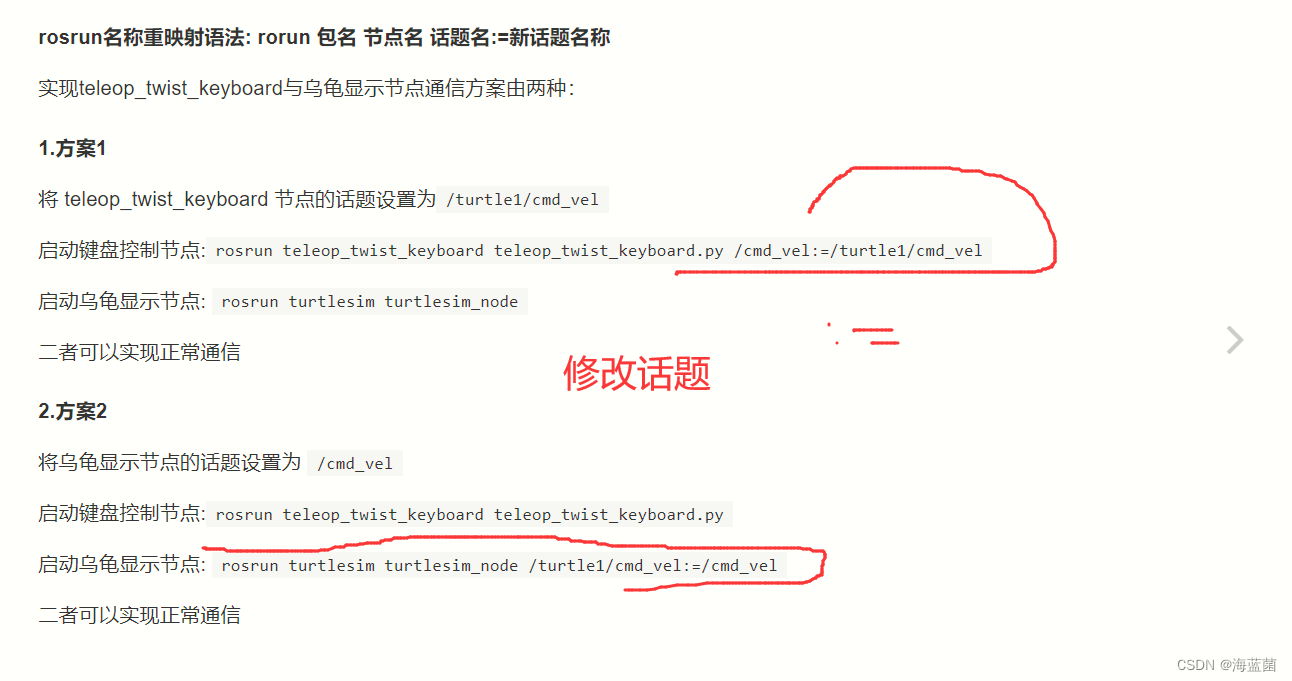
4.5.1 rosrun设置话题重映射
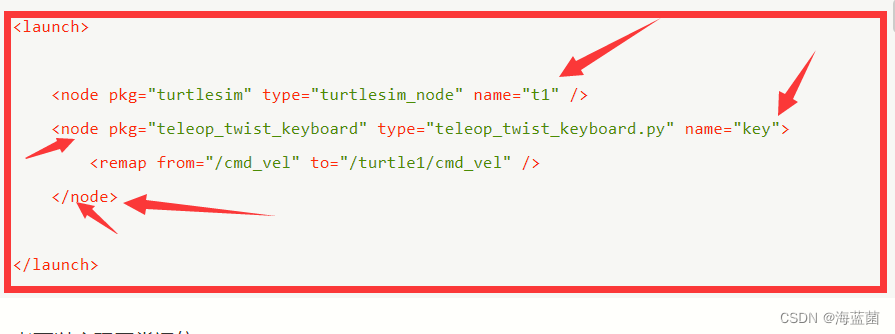
4.5.2 launch文件设置话题重映射

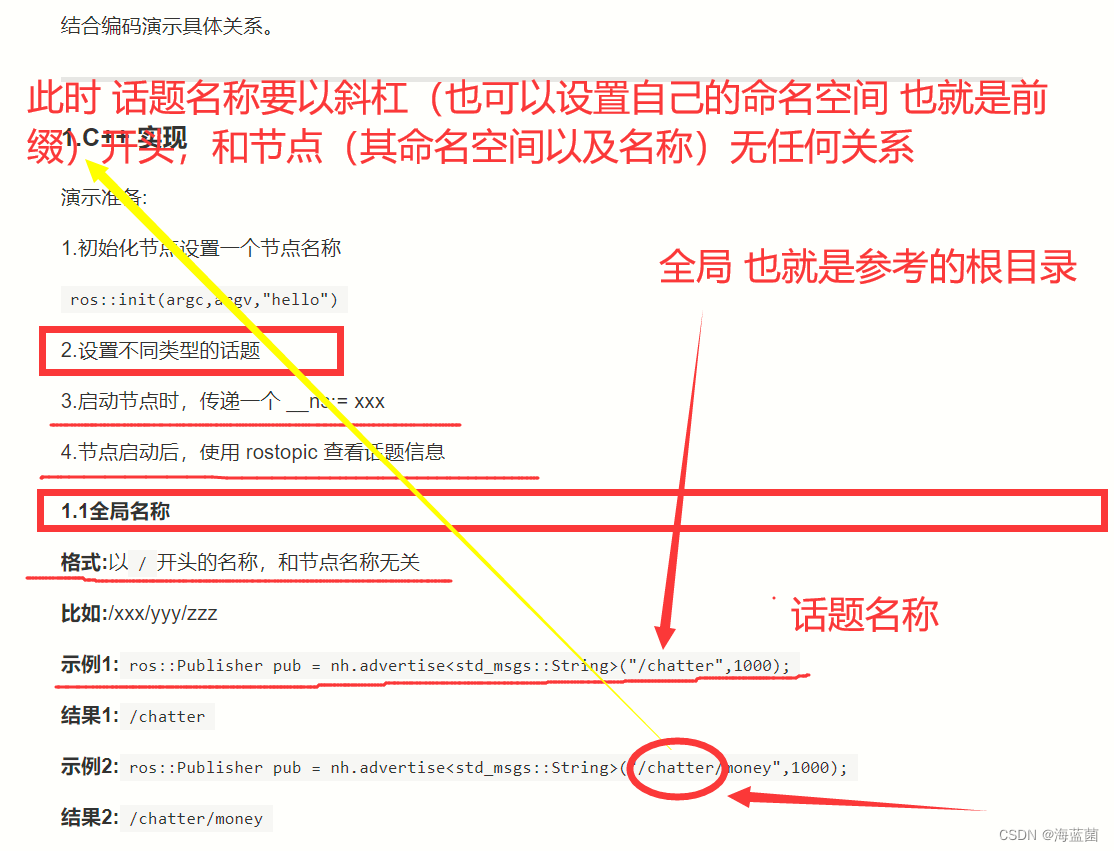
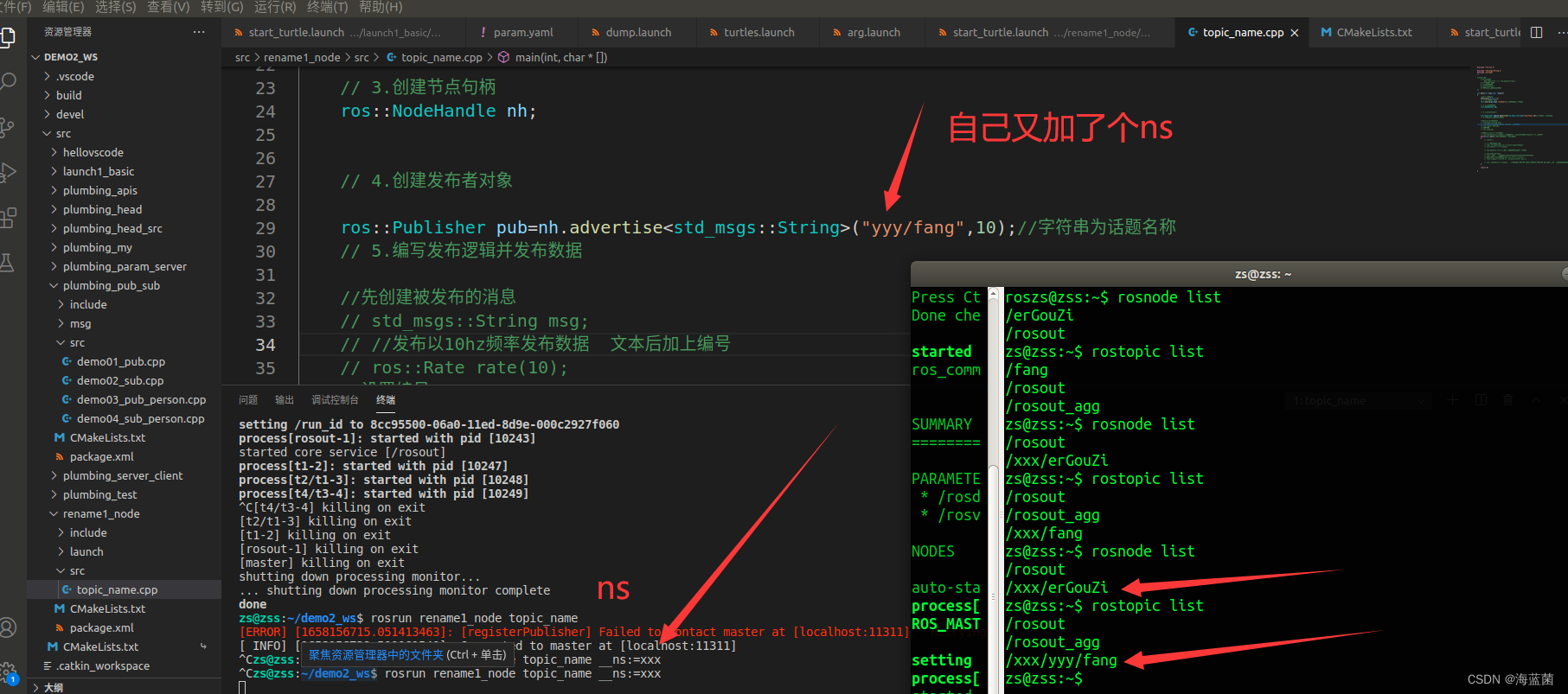
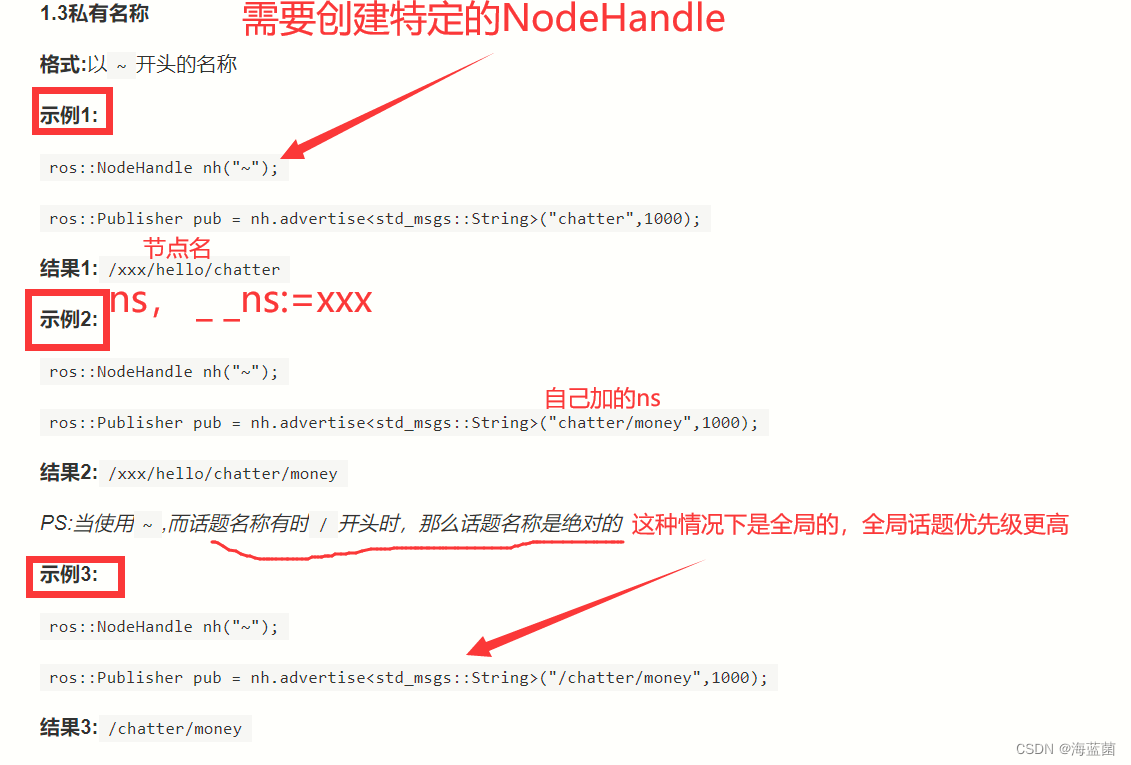
4.5.3 编码设置话题名称
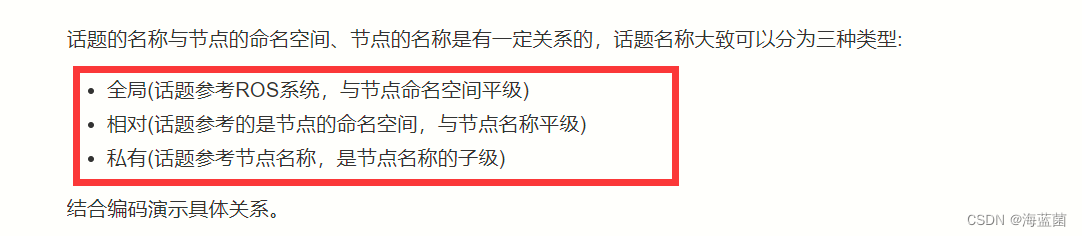
三种类型的话题
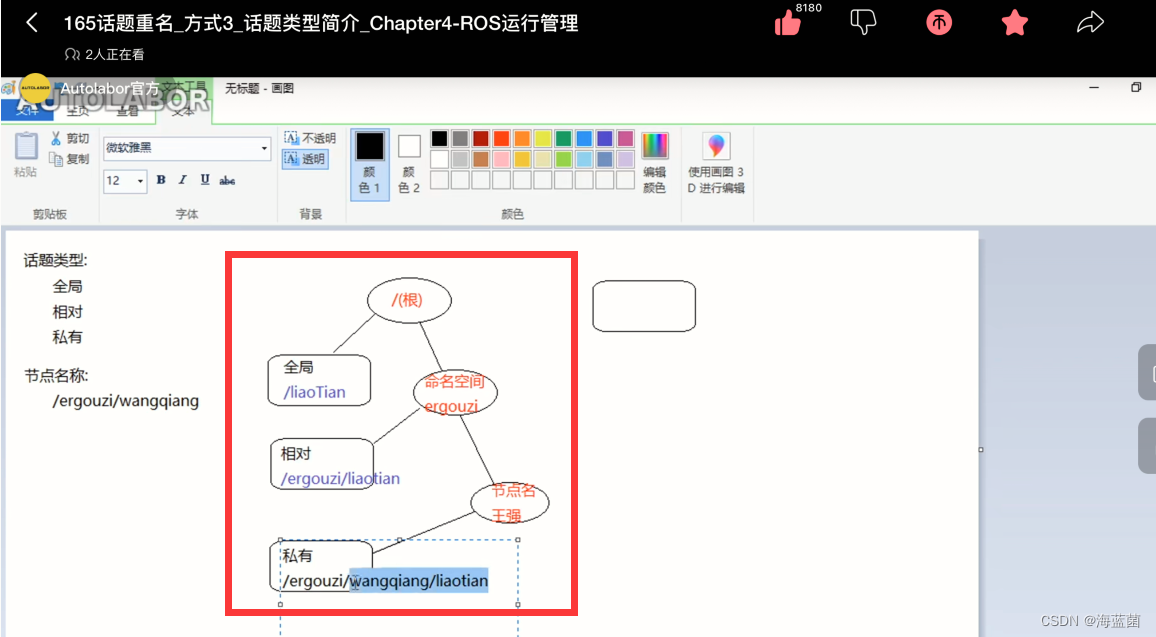
全局话题
相对话题

私有话题
4.6 ROS参数名称设置
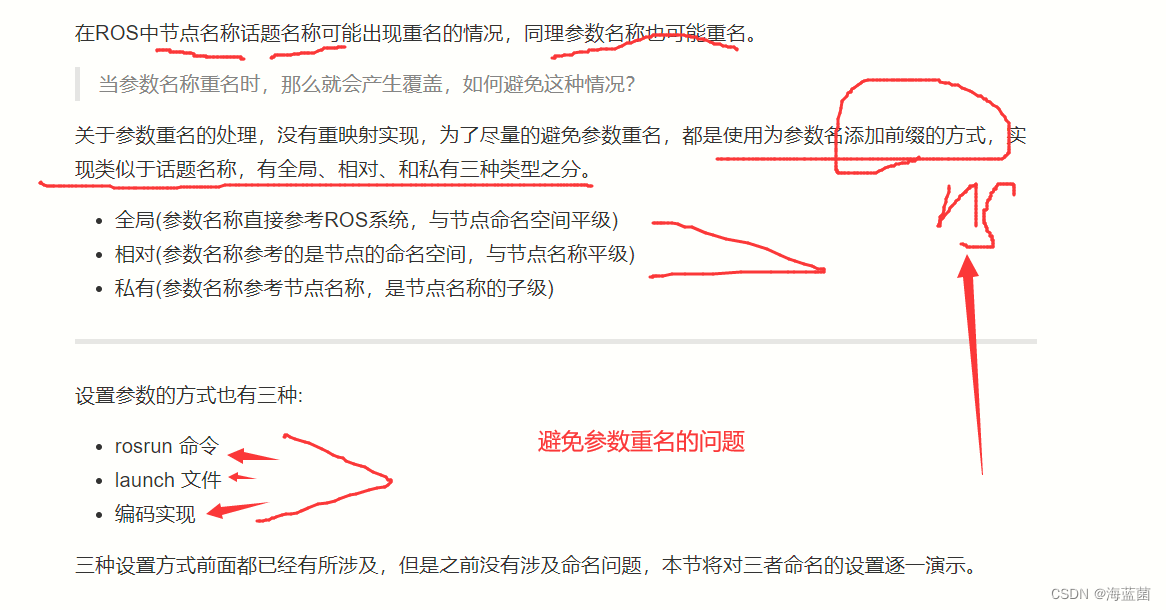
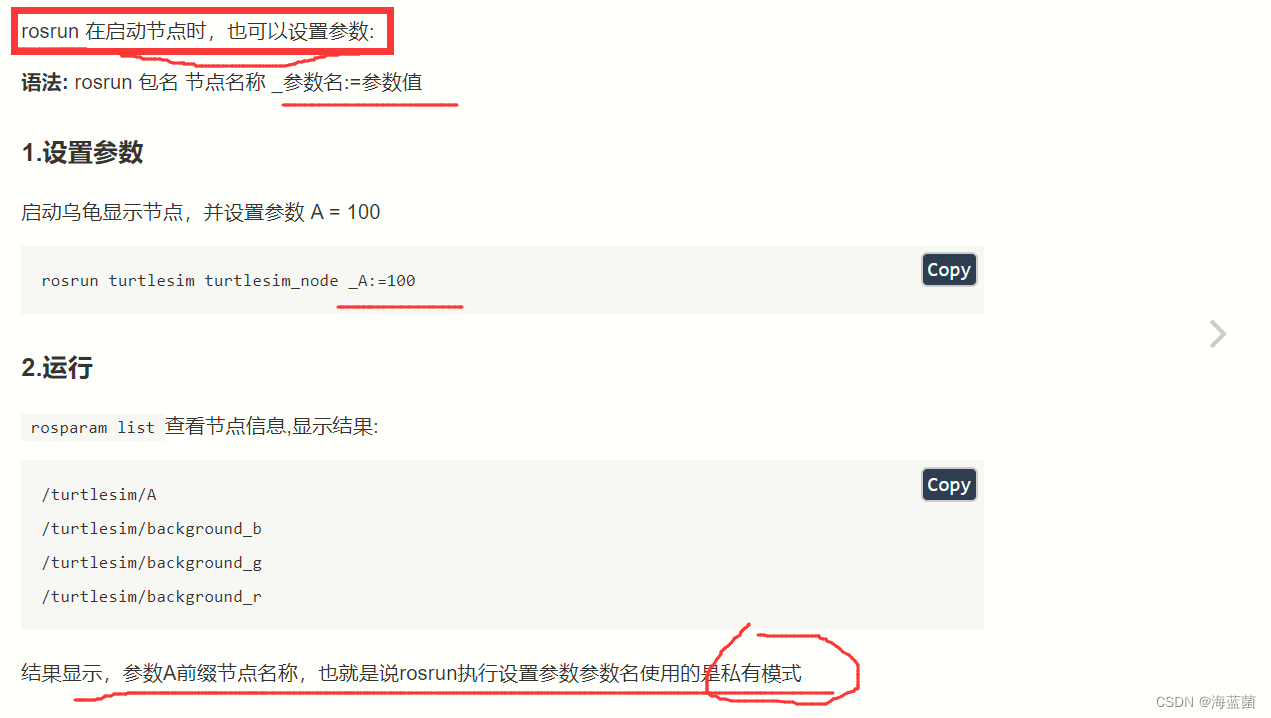
4.6.1 rosrun设置参数
默认情况下是一种私有的方式设置参数名
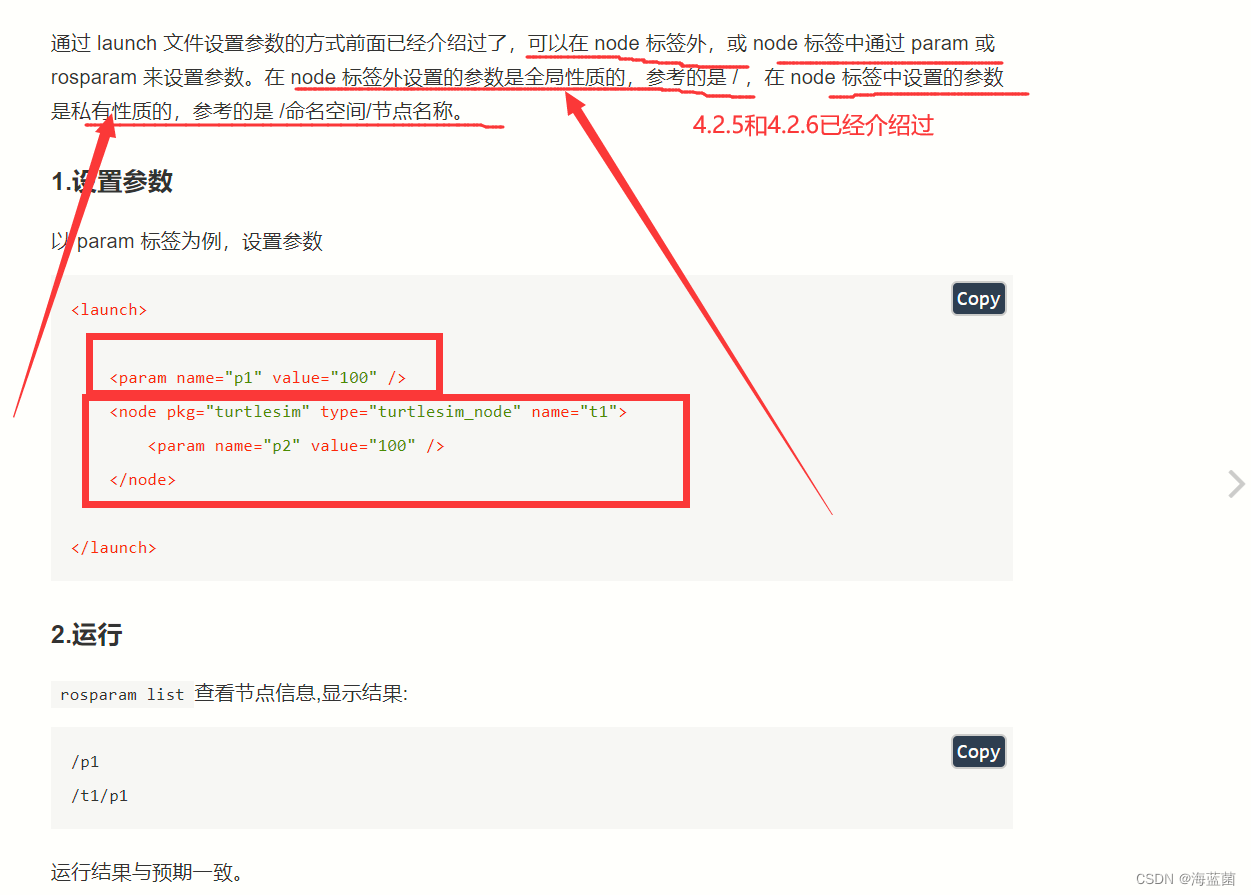
4.6.2 launch文件设置参数
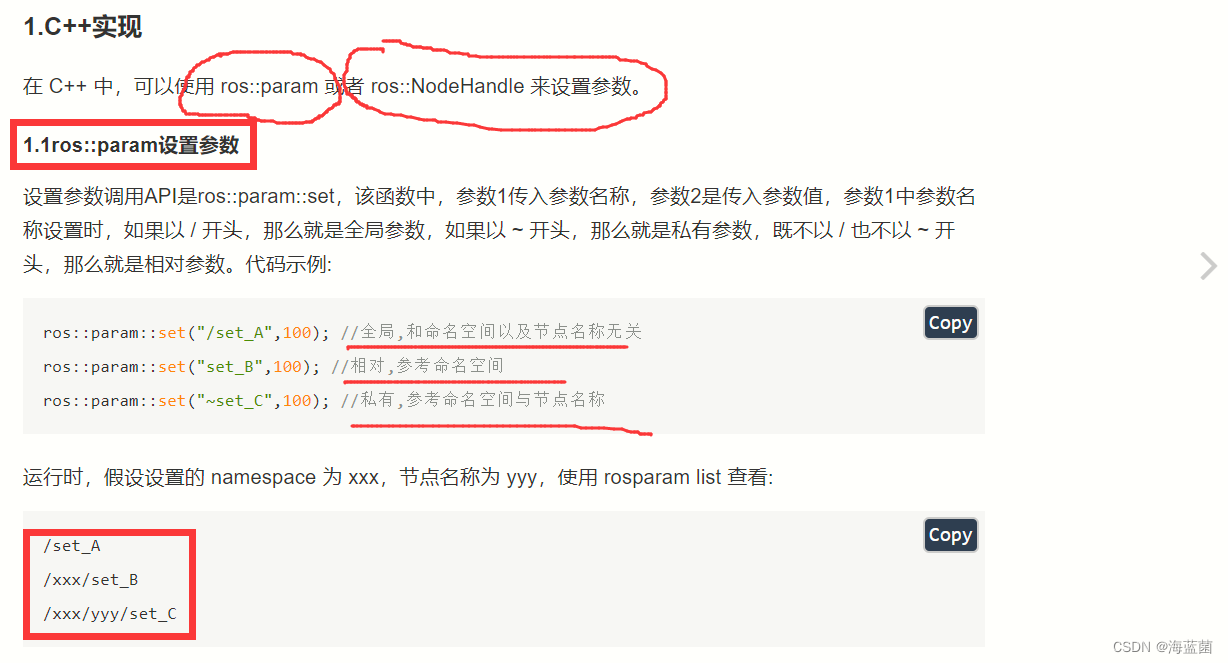
4.6.3 编码设置参数
编码的方式可以更方便的设置:全局、相对与私有参数。
ros 功能包名 可执行文件 __ns:=命名空间

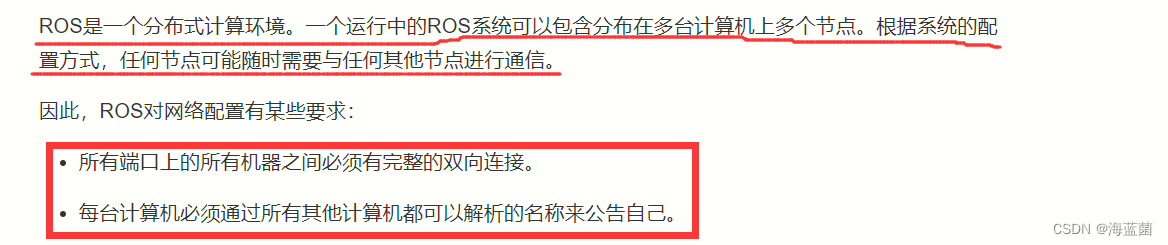
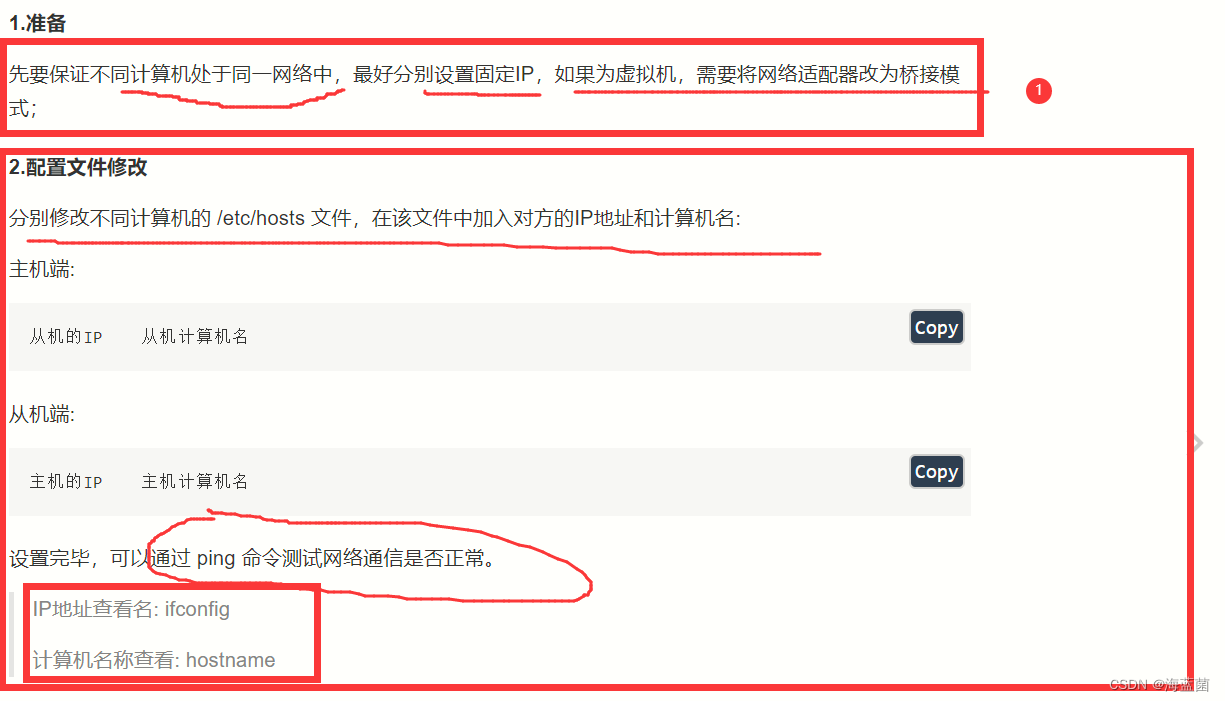
ROS 分布式通信

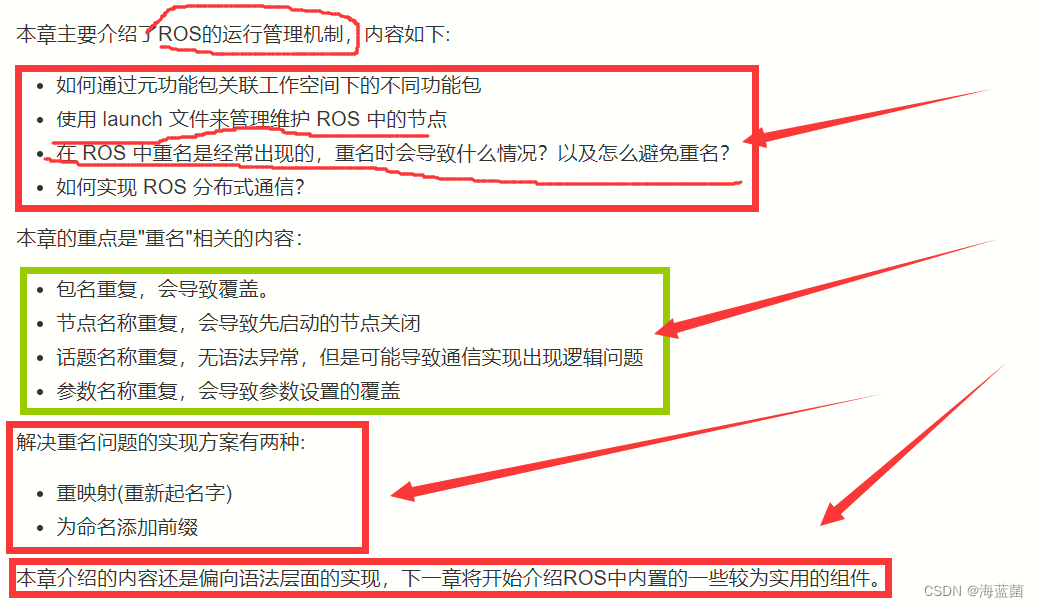
4.8 本章小结

















 2707
2707

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









