









目录
一、基础要求
1. Linux
2. Python = 3.8.0
3. conda
不会安装环境就参考我的UMI中基础环境部分
二、安装流程
1. 创建基础环境
创建环境
conda create -n robomimic python=3.8.0
激活环境
conda activate robomimic![]()
2. 安装pytorch
conda install pytorch==2.0.0 torchvision==0.15.1 -c pytorch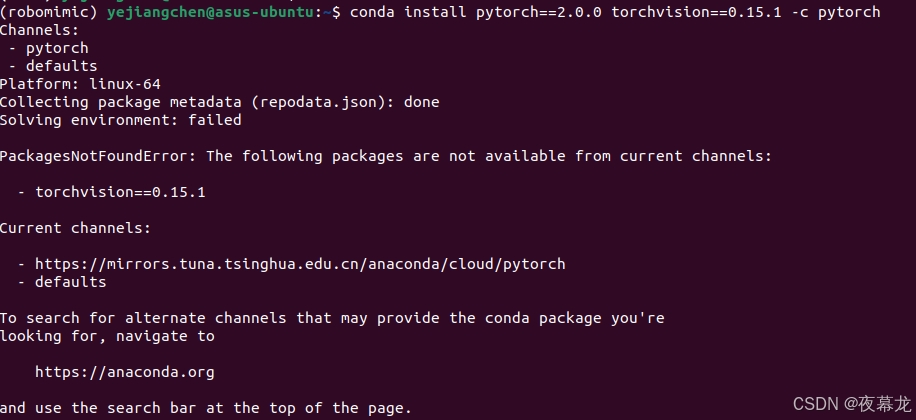
如果报错:PackagesNotfoundError: The following packages are not available from current channels,则更改指令更换源下载
conda install pytorch==2.0.0 torchvision==0.15.1 torchaudio==2.0.0 -c pytorch -c conda-forge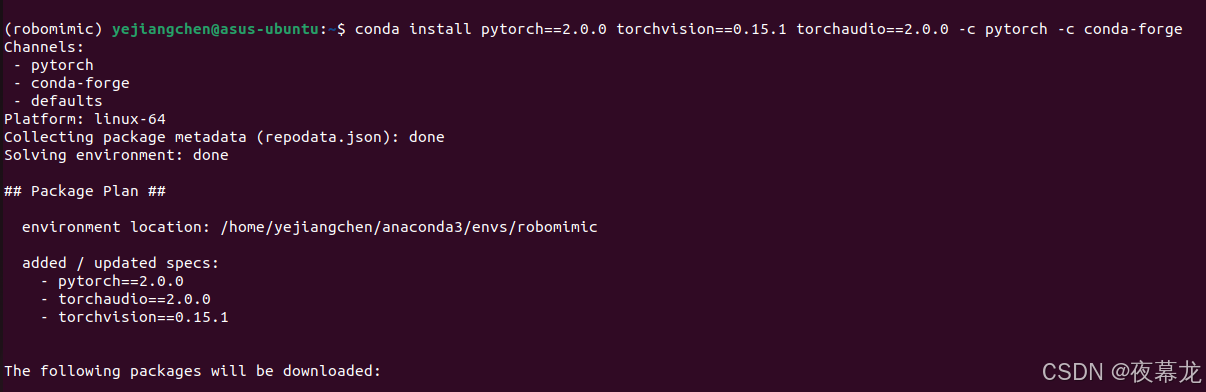
3. 安装robomimic(推荐使用源码安装)
在github上下载源码,在robomimic-master文件夹中打开终端并安装
pip install -e .
三、程序测试
1. 安装simulators
可以选择robosuite或者D4RL,推荐源码安装
建议安装目前的最新版本robosuite v1.4.1,更多细节参考robosuite专题内容
在github上下载源码,在robosuite-master文件夹中打开终端并安装
pip install -r requirements.txt
2. 测试安装
在robosuite-master文件夹中打开终端
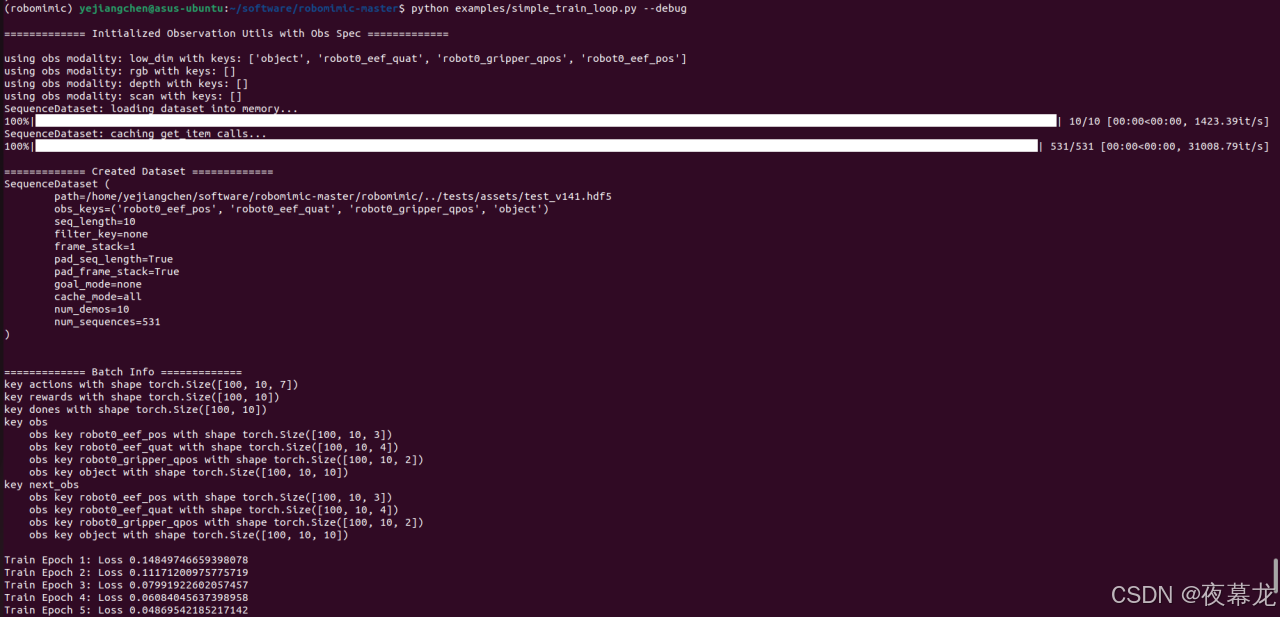
运行一个快速调试(虚拟)训练循环,测试robomimic是否正确安装:
python examples/train_bc_rnn.py --debug发现开始训练
可以进行进一步测试,进入tests文件夹运行:

bash test.sh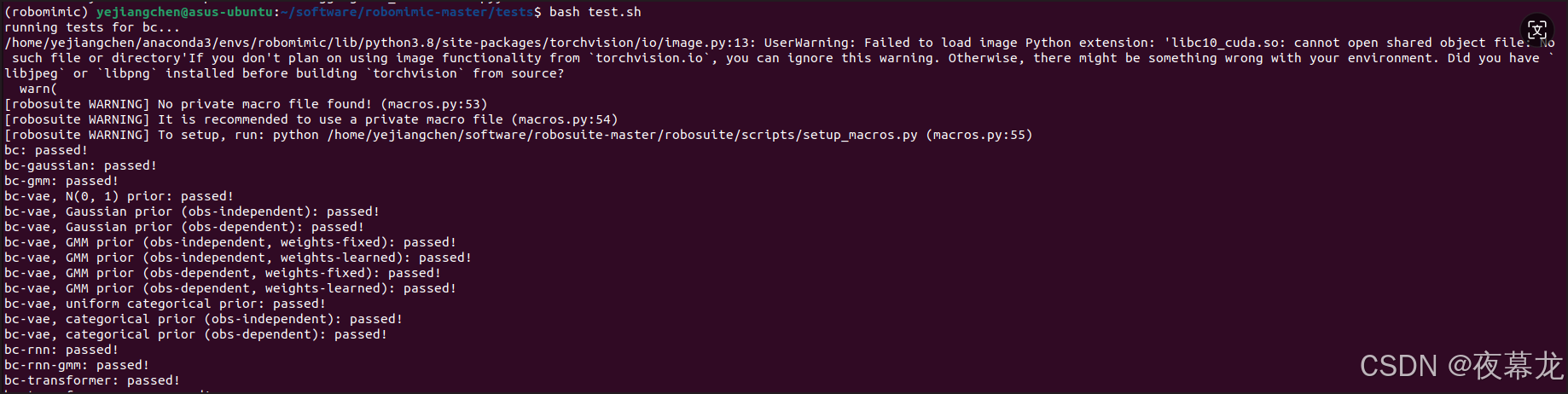
四、运行问题解决办法
在测试examples中其他程序时,比如train_bc_rnn.py
python examples/train_bc_rnn.py --debug会报错:
Exception ignored in: <function EGLGLContext.__del__ at 0x713f6df7e160>
Traceback (most recent call last):
File "/home/yejiangchen/software/robosuite-master/robosuite/renderers/context/egl_context.py", line 155, in __del__
self.free()
File "/home/yejiangchen/software/robosuite-master/robosuite/renderers/context/egl_context.py", line 149, in free
EGL.eglMakeCurrent(EGL_DISPLAY, EGL.EGL_NO_SURFACE, EGL.EGL_NO_SURFACE, EGL.EGL_NO_CONTEXT)
File "src/errorchecker.pyx", line 58, in OpenGL_accelerate.errorchecker._ErrorChecker.glCheckError
OpenGL.raw.EGL._errors.EGLError: EGLError(
err = EGL_NOT_INITIALIZED,
baseOperation = eglMakeCurrent,
cArguments = (
<OpenGL._opaque.EGLDisplay_pointer object at 0x713f54bb0740>,
<OpenGL._opaque.EGLSurface_pointer object at 0x713f7f2fba40>,
<OpenGL._opaque.EGLSurface_pointer object at 0x713f7f2fba40>,
<OpenGL._opaque.EGLContext_pointer object at 0x713f7f2fbdc0>,
),
result = 0
)
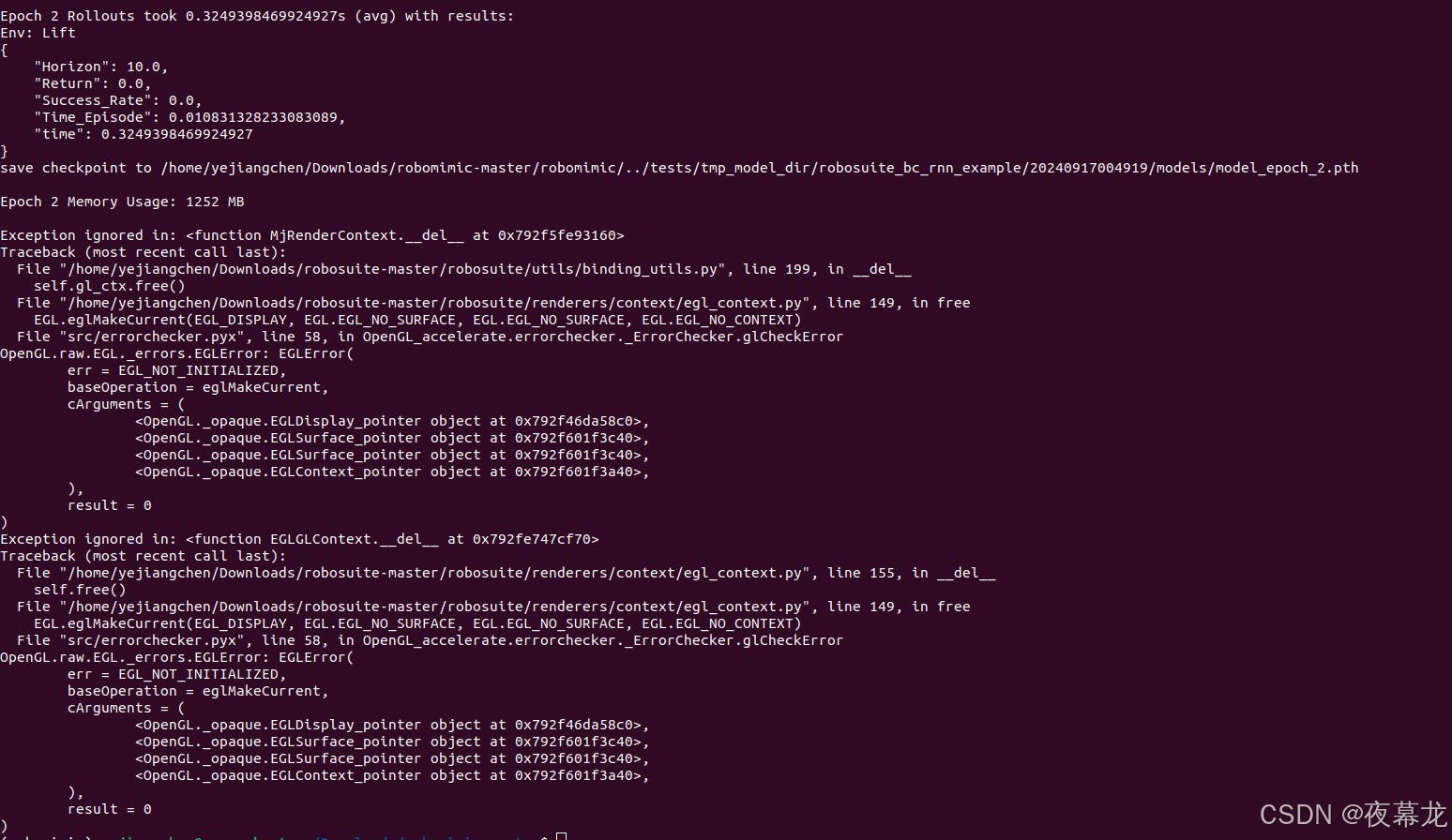
这是因为mujoco版本兼容问题!安装老版本即可解决,不安装也不会影响后续使用,所以自便。


















 4899
4899

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









