









视频教程1
视频:
一口气看完《PCL点云处理》教程_哔哩哔哩_bilibili
PCL(Point Cloud Library)点云处理学习入门指南&代码实践(最新版)_哔哩哔哩_bilibili
文档:
PCL(Point Cloud Library)学习指南&资料推荐 · 语雀
视频教程2
视频:
代码:
视频教程3
00-PCL教程-Basic Usage-Using PCL in your own project_哔哩哔哩_bilibili官方PCL点云库学习心得,如果大家比较欣赏,会持续更新PCL官网教程:http://pointclouds.org/documentation/, 视频播放量 27845、弹幕量 37、点赞数 396、投硬币枚数 312、收藏人数 1105、转发人数 53, 视频作者 边缘疯狂试探, 作者简介 关注自动驾驶人工智能的科研职业搬砖师,相关视频:02_PCL教程_Getting Started - keypoints, registration和kdtree,16-PCL教程-基础应用-在win10下安装PCL,05-PCL教程-基础应用-在兼容POSIX的(如Ubuntu)系统中编译PCL源码并安装卸载,03-PCL教程-Getting Started - octree, segmentation和sample_consensus,首个L3级自动驾驶城市落地,以后再不怕车企推卸责任!#自动驾驶 #智能驾驶 #驾驶辅助,华为L3级自动驾驶上路测试!真字眼智驾品牌慌了?到底谁在裸泳,惊呆了,他怎么敢的呀?特斯拉fsd全自动压实线弯道超大货车!我与人间全无敌!,17-PCL教程-基础应用-在win10下安装PCL 2-永久配置Visual Studio的PCL相关环境,特斯拉遇逆行老头乐,车主打开扩音器外放“叮咚鸡”,用魔法打败魔法,结局很舒适……,Ubuntu vs Debian:激烈的争论(用户为何会争论不休) https://www.bilibili.com/video/BV1GC4y1x7pv/?spm_id_from=333.1387.collection.video_card.click&vd_source=aade28408008fe0ffee5016cb40b8051
https://www.bilibili.com/video/BV1GC4y1x7pv/?spm_id_from=333.1387.collection.video_card.click&vd_source=aade28408008fe0ffee5016cb40b8051
官网地址:
Introduction — Point Cloud Library 0.0 documentation
PCL架构图:
如图PCL架构图所示,对于3D点云处理来说,PCL完全是一个的模块化的现代C++模板库。其基于以下第三方库:Boost、Eigen、FLANN、VTK、CUDA、OpenNI、Qhull,实现点云相关的获取、滤波、分割、配准、检索、特征提取、识别、追踪、曲面重建、可视化等。
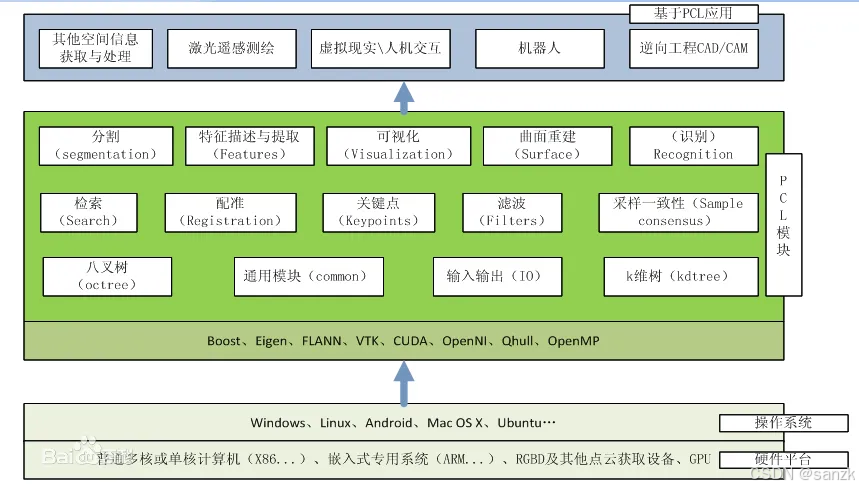
模块:
- 01common
- 02kdtree k维tree
- 03octree 八叉树
- 04search
- 05sample consensus 抽样一致性模块
- 06range-images深度图像
- 07tracking (此模块,没有官方示例代码)
- 08 io 输入输出
- 09 filters 滤波
- 10 features 特征
- 11 surface表面
- 12 segmentation分割
- 13 recognition识别(下图中没有)
- 14 registration配准
- 15 visualization可视化
- 16 keypoints关键点
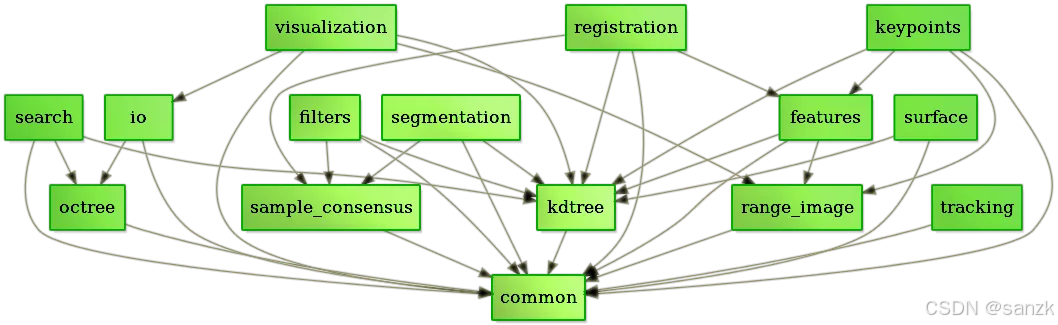
模块间依赖关系:
ubuntu18.0安装pcl
Ubuntu18.04编译安装PCL点云库(稳定可靠)_ubuntu18.04 pcl库编译-优快云博客

















 1958
1958

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









