



利用动作捕捉技术辅助偏瘫患者下肢康复的绳索驱动外骨骼
摘要
本文的目的是设计一种下肢外骨骼,以增强偏瘫患者的肌力,并在长期训练后帮助患侧恢复正常步态。
设计/方法/途径 – 提出了一种结合刚性支架和柔性驱动方法的钢丝绳驱动外骨骼,用于辅助患者进行康复步行训练。通过使用三个非接触式相机,捕捉患者的步态并分析患侧的目标轨迹。同时,开发了一种模仿健侧步态的患侧控制策略,以帮助不同程度偏瘫步态的偏瘫患者获得个性化的步行康复训练。
研究结果 – 结果表明,外骨骼可防止髋关节过度外展和尖足畸形的偏瘫步态。穿戴外骨骼后,双侧下肢的运动轨迹基本一致。基于控制策略,该外骨骼能够矫正异常步态,并在行走过程中为患者提供辅助。该外骨骼对偏瘫患者的行走康复训练具有显著益处。
原创性/价值 – 本研究提高了患者在室内进行个性化训练的效率。所提出的外骨骼为偏瘫患者的步行康复训练提供了显著益处。
关键词
外骨骼,运动
论文类型
研究型论文
1. 引言
偏瘫已成为近年来影响人们’正常生活的全球性严重问题(Go等,2015)。通常,偏瘫由中风和脑血管疾病引起,表现为患者身体一侧从头部到脚部失去控制,无法进行正常的体力活动(Demeurisse等,1980)。偏瘫患者的运动特征与正常人显著不同,且由于生理差异,每位患者具有特定的步态模式。对正常人而言,行走是一种周期性活动,下肢两侧在矢状面内的摆动是对称的。完成一个完整的行走周期,每侧下肢需分别经历一次摆动相和支撑相。而对于偏瘫患者,其行走特征则有所不同:当健侧下肢摆动时,时间缩短,步幅减小,但整体行走特征仍接近正常行走。健侧下肢具有足够的力量进行屈曲并离开地面。它经历一个完整的摆动过程,各阶段的时间比例与正常情况相似,无明显的髋关节外展和尖足畸形。当患侧处于摆动相时,下肢伸直,通过髋关节过度外展和尖足畸形来代偿关节屈曲;然后,下肢以半圆形轨迹向前移动(Liang et al., 2014)。尽管轻度偏瘫患者能够站立和行走,但患侧肌肉并未得到有效训练,而是被其他错误动作所替代。因此,有必要为偏瘫患者设计一种康复行走装置,以纠正患者的异常步态并辅助其行走。
近年来,人们提出了许多行走训练设备,也称为外骨骼。外骨骼分为两类:基于跑步机的外骨骼和地面行走外骨骼。由于基于跑步机的外骨骼具有体重支撑功能,适用于下肢过于虚弱而无法站立的患者,并可使患者在跑步机上行走。MINDWALKER(Wang等,2015)为每条下肢提供了五个自由度。髋关节在矢状面和冠状面通过来自大脑的激发信号进行驱动,从而使患者即使不使用拐杖也能提高行走稳定性。洛科马特(Colombo等,2000)、洛佩斯(Veneman等,2007)和ALEX II(Lenzi等,2013)均为电机驱动的基于跑步机的外骨骼,它们均采集正常下肢数据作为参考轨迹,以帮助患者从损伤中恢复。全球一些实验室和医院已逐步推广使用这些外骨骼(Chen等,2013)。
地面外骨骼要求患者在地面上行走,从而增加独立步态训练。由于患者不受限于固定区域,外骨骼的移动性能得到了显著提升,但设备重量、身体平衡和能量供应的设计应被仔细考虑。Lee 等(2017)提出了一种可隐蔽地穿在衣服下的可穿戴步行辅助装置。该装置紧密贴合用户的下肢,并向髋/膝关节传递辅助扭矩。WWH(Nakamura 等,2006)和WPAL(Tanabe 等,2013)均采用基于人体动力学模型的控制策略来计算用户的运动,并在不测量生物信号的情况下提供辅助。ReWalk(Esquenazi 等,2012)和Ekso [由 eLEGs(斯特劳瑟,2011)发展而来] ,是商业化推广的地面外骨骼,用于治疗严重脊髓损伤患者;它们被设计用于驱动患者独立站立、坐下、爬楼梯和行走。
此外,一些研究人员发表的论文致力于柔性外骨骼服的研究,与刚性外骨骼相比,柔性外骨骼服因重量轻和便携性,在日常康复应用中可能更具优势。这些设备使用织物与身体连接,并通过包登电缆将辅助力传递至关节。哈佛大学的一个团队推出了可穿戴的柔性外骨骼服以辅助行走。从开始,这些外骨骼服就被用于辅助关节,并降低正常人行走时的能量消耗(Asbeck等,2014)。此后,这些外骨骼服进一步被开发用于研究其对中风患者实现更正常行走的促进作用(Awad等,2017)。这些外骨骼服易于实现对齐和可调节性。然而,由于缺乏刚性支撑框架,这些外骨骼服无法为患者提供支撑和保护。
柔性外骨骼服可实现与患者的舒适交互,但其主要作用是提供辅助,而多关节外骨骼则能够进一步矫正异常步态。然而,多关节外骨骼辅助步行康复训练仍存在一些不足之处。首先,这些外骨骼主要用于缺乏运动能力的患者,直接驱动下肢前进。对于偏瘫患者而言,其肌肉无法得到有效锻炼,可能容易导致残疾。其次,在帮助患者调整步行姿势的过程中,一些控制策略从健康人获取角度数据以规划运动轨迹,这种方法耗时且无法针对具有不同程度偏瘫步态的个体患者实现个性化。事实上,可以参考下肢健侧的运动情况。因此,结合刚性支架和柔性驱动方法的多关节外骨骼将是更适合患者的解决方案。此外,由于使用摄像头进行非接触式测量的方法已得到显著改进,采用摄像头而非传统的惯性传感器来获取下肢健侧关节的角度数据,并指导患者行走。Gao等 (2015)使用Kinect直接识别上肢关节用于康复训练。同时,在镜像疗法中使用虚拟环境,指导患者同步移动双臂。
本文提出了一种绳索驱动下肢外骨骼,用于辅助患者进行康复步行训练。该外骨骼针对下肢患侧具有以下四个自由度:髋关节屈伸和膝关节屈曲/伸展两个主动自由度,以及髋关节内外旋和踝关节背屈/跖屈两个被动自由度。两个电机安装在腰部,通过两根钢丝绳驱动髋关节和膝关节在矢状面内旋转。同时,在三个位置布置三个摄像头以完成步态识别,解决了因手臂与外骨骼遮挡导致的关节位置难以识别的问题。每一步健侧的步态数据被记录下来,并直接用于下一步患侧的行走。通过模仿健侧的步态,外骨骼驱动患侧下肢运动。从而,该外骨骼能够纠正不同程度偏瘫患者的异常步态,避免了使用大量数据匹配最佳个体行走轨迹的过程,从而提高了患者在室内进行个性化训练的效率。
2. 运动特征识别
下肢运动特征可以通过相机(RMONCAM,深圳,1080p,30帧每秒)进行识别和辨识。相机能够获取下肢在某一平面内的二维位置。通过使用卡尔曼滤波方法,进行最优估计以减少计算量。同时,可消除系统激励误差和观测误差。上位机能够在相机读取两幅相邻帧图像的时间内完成数据处理,延迟时间仅体现在相机读取图像的时间上(<30 ms)。
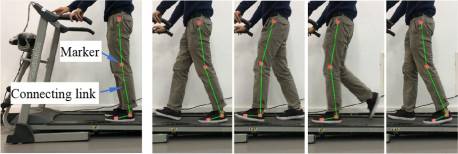
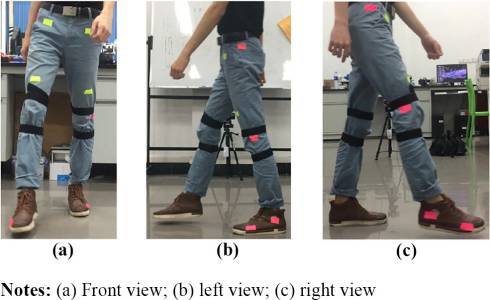
图像识别和数据处理的方法如下:一侧的下肢可简化为三个连杆,包括大腿、小腿和脚部。在单侧下肢的四个特定位置放置红色标记点,摄像装置分别识别各标记点的位置。通过连接标记点得到连杆,并可确定关节运动角度。
获取四个标记点位置的原理相同,包括卡尔曼滤波的初始值设置、预测、匹配和更新四个步骤。首先,应初始化卡尔曼滤波器的参数。当相机获取第一帧图像时,将识别出四个红色标记点,计算机进行阈值分割,使背景与目标区域分离。考虑到光照及标记点自身对相机的影响,会对图像进行膨胀处理,以填充目标区域内部并消除区域内的孔洞。此时,可获得白色区域的边缘。然后,

根据标记点的中心及其在图像坐标系中的坐标确定结果,依据卡尔曼滤波在图像中应用的原理,可初始化卡尔曼滤波器的参数,并预测第二幅图像中标记点的位置。对估计值邻域内的图像进行分割和膨胀处理,可在第二帧图像中计算出目标标记的边缘和中心。由于相机获取的观测值与计算的目标值并非精确的标记点,因此对这两类数值进行滤波,得到最优目标点以最小化均方差。通过采用相同原理处理下一帧图像,直至完成全部下肢运动的处理,从而测量测试者持续行走一段时间的步态。
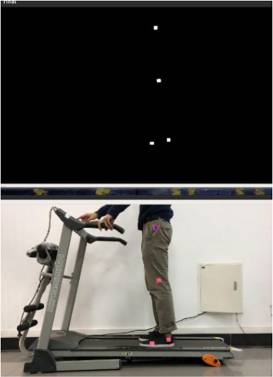
矢状面下肢二值图像如图1所示,由原始图像经阈值分割后得到。下肢运动识别效果如图2所示。可以看出,标记点被成功识别,并确定了连接关系。需要指出的是,带标记的服装不应过于宽松,以免导致关节位置跟踪不准确。可通过在关节周围使用绑带收紧衣物,以减少测量误差。
3. 偏瘫患者的步态
进行了一项实验,以捕捉患者在额状面和矢状面的运动特征。由于相机识别到了标记点的二维位置,总共使用三个摄像头在时间同步的情况下获取偏瘫患者的步态:其中两个摄像头分别测量下肢在矢状面内的摆动,另一个摄像头捕捉下肢在额状面内的运动。在矢状面内,可以观察到三个关节的屈/伸运动;在额状面内,则捕捉髋关节外展/内收运动。三个摄像头拍摄的图像如图3所示,对应的二值图像如图4所示。
十名偏瘫患者和正常人的关节角度如表I所示,以均值(标准差)表示。结果显示,髋关节和膝关节屈曲不足导致了髋关节过度外展。当患侧下肢即将离地(脚尖离地)时,脚部缺乏足够的力量完成正常的踢腿动作,从而导致尖足畸形。相比之下,下肢健侧与正常人之间的角度差异不显著。
患者的步态周期中行走时间比正常人更长。且偏瘫程度越严重,行走速度越慢。这表现为每走一步后为维持平衡而延长下肢支撑时间。由此可见,应通过机械装置限制髋关节过度外展。同时,应对患侧下肢进行辅助离地并向前移动。需要矫正的目标轨迹应首先与健侧保持一致。当患侧肌力增强时,支撑能力也随之增强,随后健侧行走将更加稳定。最终目标是恢复受损下肢的正常功能,使双侧行走达到与正常人一样平衡的状态。基于上述要求,可设计一种外骨骼,实现康复步行训练的目标。
| 关节运动 | 患侧 | 健侧 | 正常人 |
|---|---|---|---|
| 髋关节角度(°) | |||
| 峰值屈曲 | 10.4 (9.7) | 14.8 (6.9) | 17.8 (5.3) |
| 峰值外展 | 9.7 (10.3) | 4.3 (8.3) | 3.8 (7.8) |
| 膝关节角度(°) | |||
| 峰值屈曲 | 34.6 (9.6) | 58.3 (9.3) | 64.3 (6.4) |
| 踝关节角度(°) | |||
| 脚尖离地时的背屈 | 2.8 (8.4) | 5.4 (7.8) | 3.6 (6.9) |
表I 偏瘫患者与正常人的关节角度
4. 结构设计与控制策略
4.1 机械设计
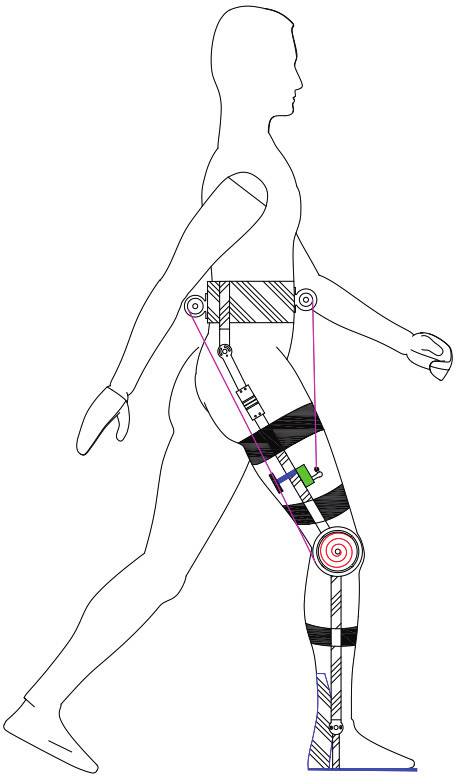
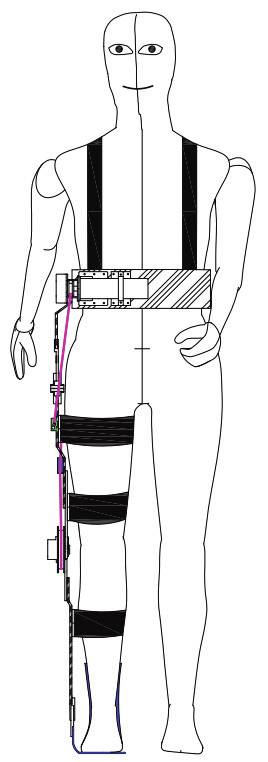
绳索驱动下肢外骨骼旨在帮助偏瘫患者行走。该外骨骼的机械设计包括连接模块、驱动模块和限位模块。外骨骼的示意图如图5所示。外骨骼的每根连杆通过魔术贴安装在人体的大腿、小腿和脚部。两条绑带连接到腰部的环形板,并固定在人体肩部。该环形板安装有两个直流伺服电机,这两个电机对称地布置在额状面的前后位置:其中一个电机驱动安装在大腿上的大腿杆,另一个电机驱动转台,可为小腿提供辅助。
患侧髋关节和膝关节的屈/伸运动分别由两根钢丝绳驱动。在考虑步态周期中下肢关节的角度变化后,我们在患侧设置了四个自由度:髋关节屈/伸和膝关节屈/伸两个主动自由度;髋关节内旋/外旋以及踝关节背屈/跖屈两个被动自由度。为了矫正异常步态并确保行走过程的安全,运动范围
通过设计限位结构来限制所有自由度。每个自由度的活动范围如表II所示。
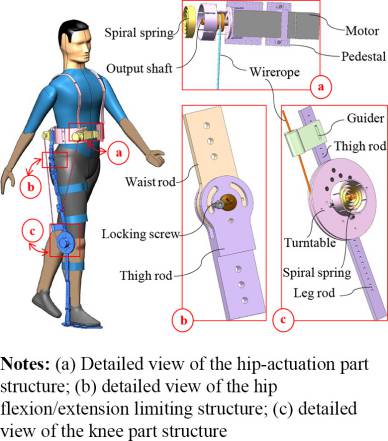
图6(a) 展示了髋关节驱动部分结构的详细视图。底座安装在环形板上。钢丝绳的一端连接到腰部前方电机的输出轴,另一端固定在大腿杆上。螺旋弹簧的内环嵌入输出轴的末端。螺旋弹簧起到缓冲作用,减少设备运动时的振动。在髋部摆动期间,钢丝绳驱动髋关节屈曲运动,同时螺旋弹簧储存能量。随后,人体髋关节依靠自身肌肉伸展,螺旋弹簧释放弹性势能,使电机反向旋转以间接辅助髋关节伸展。在螺旋弹簧和电机的共同作用下,人体髋关节完成一个步态周期。
图6(b) 展示了髋关节屈伸限位结构的详细视图。腰部杆和大腿杆可在矢状面内旋转。锁紧螺钉与固定于
| 关节 | 自由度 | 活动范围(°) |
|---|---|---|
| Hip | 屈曲/伸展 | -10/30 |
| 内旋/外旋 | -10/10 | |
| Knee | 屈曲/伸展 | -60/0 |
| 踝关节 | 背屈/跖屈 | -50/10 |
表II 各关节活动范围
大腿杆并沿腰部杆的凹槽在规定范围内移动。因此,两根杆的旋转范围被确定。其他限位结构具有类似原理。
图6(c) 展示了膝部结构的详细视图。大腿杆和小腿杆分别通过魔术贴固定在大腿和小腿上。转台固定在小腿杆上,并与膝关节同轴。为了避免行走过程中钢丝绳与人体发生干涉,钢丝绳一端连接到腰部后方的电机,另一端在穿过安装于大腿杆上的导向器后缠绕在转台上。传动轴一端固定在大腿杆上,螺旋弹簧的内环嵌入轴的另一端。螺旋弹簧储存能量并起到缓冲作用,其原理与前述类似。在膝关节摆动初期,利用钢丝绳为膝关节屈曲提供辅助。随后,转台上的螺旋弹簧驱动膝关节伸展运动。尽管腿部支撑地面时,下肢肌肉仍会进行轻微的膝关节摆动。
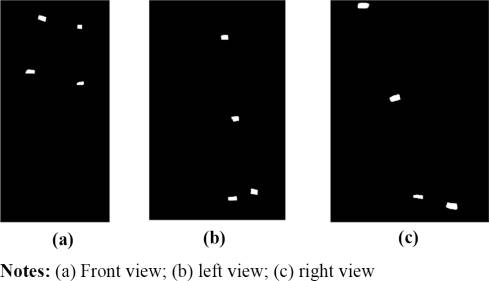
图7 显示了关节角度与电机角度之间的关系。表III 给出了计算参数的定义,以及相关关系如下:
$$
u_{m1} = \frac{\sqrt{s_2^2 + s_3^2 - 2s_2s_3\cos\left(\frac{\pi}{2} - \gamma\right)} - g_1}{b} \cdot s / R_1 \quad (1)
$$
$$
u_{m2} = u_k - r / R_2 \quad (2)
$$
4.2 控制系统
图8 显示了控制系统的框图,该系统在功能上可分为以下四个部分:上位机模块、下位机模块、传感器模块和人‐外骨骼交互模块。本系统通过上位机提供控制命令,然后由下位机执行指令,最终作用于人体。通过摄像头和电机编码器对位置的判断,可完成康复步行过程。具体过程如下:患者被置于直立站立时的初始位置。当患者准备向前行走时,下肢健侧首先移动。同时,摄像头采集下肢健侧的角度数据,并存储到上位机中。当下肢健侧触地并完成摆动相后,摄像头也结束了此期间关节角度的采集。随后,患者开始患侧下肢的摆动动作。摄像头按照相同原理持续记录患侧每一帧图像的关节角度。从第一组采集的数据开始,上位机计算当前记录数据与之前存储对应数据之间的角度差;然后将其转换为电机旋转角度以驱动电机。依照此规律持续进行,患者带动患侧下肢向前摆动。在判断完所有数据后,患侧下肢完成摆动相。
本次试验中的数据采集与处理均为在线进行,而行走时不穿戴外骨骼所测试的初步关节角度数据用作开关。一旦康复训练过程中关节角度超过阈值,开关关闭,电机将停止对患侧施加作用力,以确保患者安全。
5. 实验
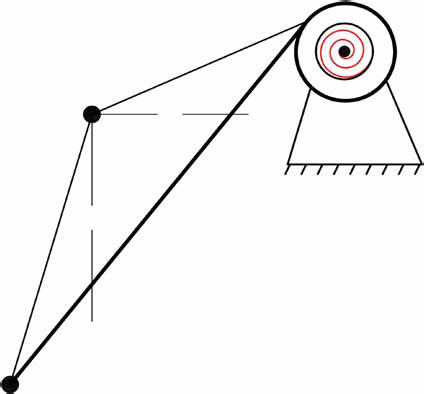
图9 展示了用于验证讨论的外骨骼原型装置。该原型装置组装后重4.55千克。在图10 中的实验装置用于测试该原型装置。
在图10中,测试对象身高为1.75米,其腿长为0.9米。跑步机可改变行走速度,并在实验中实现精确的行走速度控制。上位机通过CAN总线将电机电流传输至SMC600电机控制器(深圳雷赛SMC600),进而驱动两个电机(深圳拓达伺服 MT42)。角度数据由摄像头采集并发送至上位机。
十名从医院招募的偏瘫测试对象参与了实验(N = 10,年龄52±8岁,体重62±6.3千克,身高172.7±6.7厘米,均值±SD)。鉴于偏瘫患者的异常步态已被讨论,本实验中测试对象穿戴外骨骼进行行走,以验证其效果。由于跑步机可为测试对象提供一个固定区域,使摄像头能够对多个步态周期内的运动进行连续监测,因此实验要求测试对象在跑步机上以0.8和1.6千米/小时两种不同速度行走。每次测试后,测试对象至少休息20分钟,直至心率降至平稳状态。开始了下一次测试。我们为膝关节使用了一组刚度值为4 Nm/rad的螺旋弹簧缓冲器,为髋关节使用了刚度值为1.5 Nm/rad的螺旋弹簧缓冲器。在行走开始时,确定了受试者直立站立的初始位置,此时螺旋弹簧已安装在外骨骼上。同时,钢丝绳被预紧,以确保电机能够准确驱动下肢。
由于髋关节和膝关节由外骨骼驱动,记录了每个下肢在矢状面内的髋关节和膝关节角度,以直接观察下肢的运动情况,而踝关节的角度变化未用作评估指标。图11 和 12显示了一名测试对象在行走速度为0.8和1.6千米/小时时,下肢在矢状面内的角度变化。红色曲线和绿色曲线分别表示患者穿戴外骨骼后健侧和患侧的摆动情况。结果表明,双侧下肢均呈周期性运动。患者穿戴外骨骼后,在0.8千米/小时的速度下,髋关节的活动范围为 -18°到12°,膝关节的活动范围为0°到50°。当速度增加至1.6千米/小时时,髋关节的活动范围为 -22°到12°,膝关节的活动范围为0°到57°。外骨骼既未限制下肢的正常运动,也未超出安全范围。在相同速度下,健侧与患侧的角度幅值接近,并保持在稳定范围内,证明双侧下肢在矢状面内的步态相似。同时,由于机械限位结构的限制,行走过程中未出现明显的髋关节外展和尖足畸形,因此外骨骼在纠正异常步态方面发挥了作用。总体而言,该外骨骼为偏瘫患者的步行康复训练提供了显著益处。


6. 结论
总之,本文提出了一种绳索驱动下肢外骨骼,用于矫正偏瘫患者的异常步态,并在行走过程中为其提供辅助。通过使用三台非接触式相机,捕捉患者步态并分析患侧的目标轨迹。此外,开发了控制患侧的策略,该策略模仿健侧的步态,以帮助不同程度偏瘫步态的偏瘫患者在日常生活中获得个性化的步行康复训练。制造了所提出的外骨骼原型,以验证理论研究的结论。通过测量下肢角度数据,发现该外骨骼在步态矫正和外骨骼辅助行走方面的有效性。
需要进一步研究以针对不同肌力的患者开展个体化康复训练。下一代设备将集成力传感器和阻抗控制器。应考虑长期训练后肌力水平的评估方法。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









