



10 面向身体残障人士的智能医疗疾病检测传感
1 引言
所提出的系统旨在帮助肢体残疾人士检测医学疾病,并通过启用系统以提供进一步的援助或帮助。
该系统使用具有感知参数能力的智能可穿戴传感器,能够将参数数据转换为所需形式,并与附近的网关或服务器通信。
如今常见的设备——智能手机,被用于实现边缘计算功能。该设备的 GPS 功能用于确定位置,RTC 用于记录时间。消息和通话功能则用于及时关注。
该系统的一个关键特性是使用多个传感器,这些传感器可以感知多个通常相互依赖的参数。这可用于区分医学疾病与攻击或传感器故障。此功能提高了系统的性能,并降低了误接受率(FAR)。
提出该系统的动机是协助处于恐慌状态的身体障碍人士,通过不同的生理属性进行识别。该系统通过多值传感器信息进行验证,以推断不同年龄下的身体状态。整个系统设计采用三种传感器来测量参数,即脉搏率、皮肤电导和呼吸。本系统使用的智能传感器具备通过蓝牙、低功耗蓝牙、Zigbee 等短距离协议(如 IEEE 802.15.4 标准)进行通信的能力。
网关是物理系统与信息系统的主接口,负责将短距离协议数据包转换为传输控制协议/互联网协议数据包,并将其发送至服务器或云平台进行存储和进一步处理。所提出的网关具有多个通道,以支持数据传输机制。根据采集的参数值,数据需要进行轮询、流式传输,或必要时进行传输。
以连续形式传输。在网关中,为所需数据的传输提供了独立的通道。该多通道多协议网关用于减小尺寸和成本,以提升系统性能。
该系统需要大容量且灵活的存储空间来保存采集的数据,并需要强大的计算能力以在决策解决方案中实现复杂的算法。在传感器网络中,通过逻辑比较多个属性来确定身体的状态。由于云计算平台具有高可用性,因此它是此类系统的最佳适用环境。
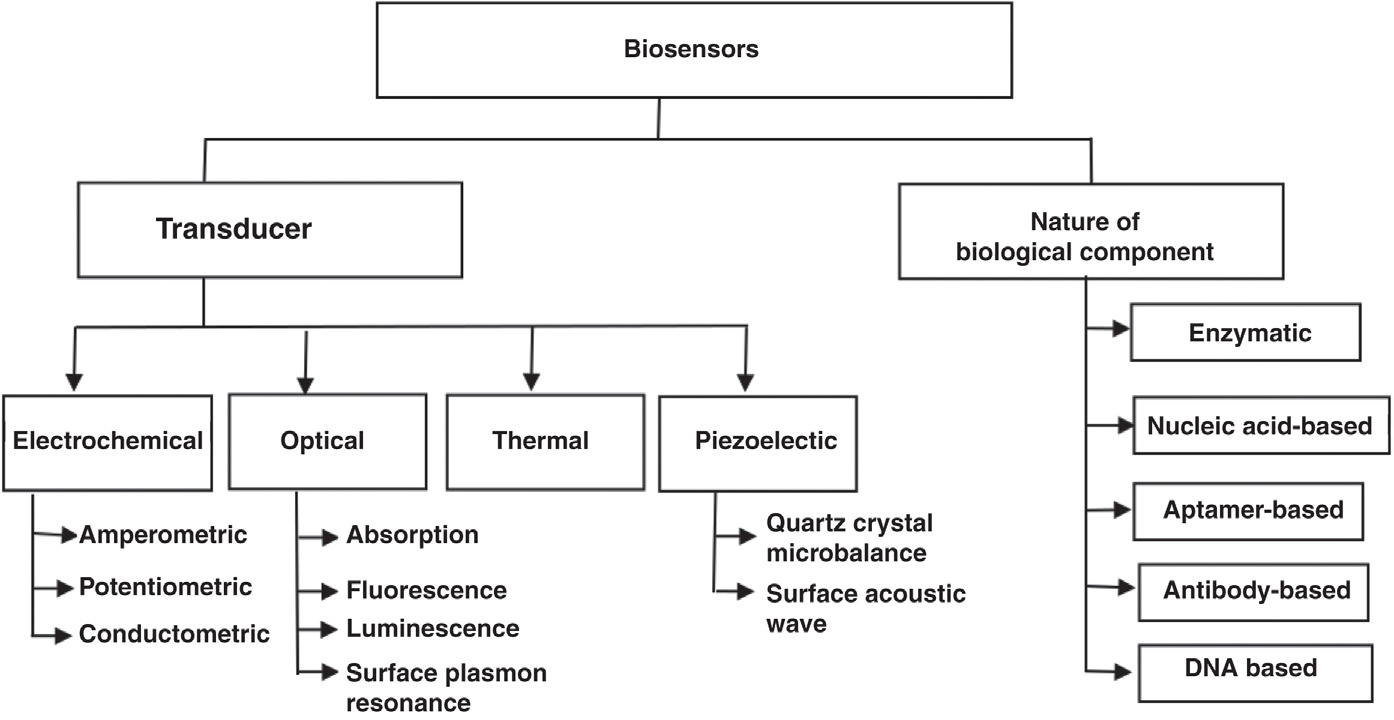
生物传感器根据换能器类型和生物组分的性质进行分类。这些可以大致如图 10.1 所示进行分类。
2 文献综述
为了安排实验设置和执行方法,对特定领域的相关工作进行了文献调研。研究了类似的系统,以了解体感传感器网络中的算法、数据传输和数据分析,以及传感器网络的质量参数,如通信范围、响应时间、灵敏度等。体感传感器网络中的通信是链路传输的关键方面[1]。多参数传感器网络中的能耗问题被讨论,以提高传输的耐久性。针对传感器网络中随机化的能量模型被提出,并设定了乐观的通信范围[2]。建议在健康监测系统中采用抢先式行为分析建模,以增强个人医疗保健系统中计算模型的应用范围[3]。通过实验研究腕骨处动脉的心跳脉冲,以实现生物压力的无线通信[4]。
讨论了具有传感器互操作性的异构系统,以推荐健康监测系统中的低功耗网络[5]。通过生物膜中的血流进行情况监控,为体感传感器网络提供了可实施的方案[6]。推荐采用多值确定性系统,将心率(HR)、皮肤电导率(SC)和面部表情相关联,以实现可靠且乐观的情绪检测[7,8]。针对医疗危机以及对肢体残疾人士身体内病因的早期检测,数据传输的算法实现需要安全平台来支持通信和存储[9]。
各种开源工具可用于基于移动设备的交互系统中的眼动追踪,以检测嗜睡情况[10,11]。基于云计算的安全与隐私保护框架在移动医疗领域中应运而生。针对不同年龄组在各类身体活动中的心率监控与健康状态监测,以最低功耗实现,在医疗领域中尤为突出[12,13]。通过可植入式生物传感器结合安全通信协议,解决了生物医学系统中的挑战[14,15]。利用身体内的伽凡尼反应,定义了用于体内通信的南卡罗来纳州及其中的挑战[16,17]。提出体域电路中的协同体内网络,以实现平滑数据传输以及有效的节点布置,支持重要的基于位置的通信[18]。
在多跳环境中,无线介质容易导致吞吐量较低,而采用协作路由机制适用于体感传感器网络。这可以规范化网络开销,并显著提高数据包投递率[19,20]。基于云的智能家居系统结合物联网系统,通过网关通信来协调网络。实现了一种自供电物联网系统,以在紧急情况下提供医疗援助[21]。系统地讨论了医疗应用,以推动基于物联网的架构在患者健康监测系统中的应用[22]。针对网络服务质量中的路由机制进行了比较研究,并探讨了数据传输和应用中的实时问题[23,24]。
数据依赖性是主要问题,通过传感器内部网络的内部路由来解决生物传感器网络所提供的服务质量问题[25]。IEEE 通信协议 802.15.6 被用作介质,以确保链路到链路传输的准确性和可靠性[26,27]。传感器之间的信号通信通过数据链路层协议进行处理,以便进行有效分析,从而在物理通信中应用特定场景的协议[27]。许多短距离无线协议被讨论,例如蓝牙、低功耗蓝牙、Zigbee、6LowPAN,并与 802.15.4 标准集成[27]。建议对传感器内部网络的数据包进行动态调度,以实现可靠通信[28]。使用移动设备和耳机监测心血管活动[29]。通过健康监测系统观察皮肤在各种应激行为下的出汗率,以推导出日常生活中活动模式[30]。
表 10.1 给出了基于工作原理、可测量的有用参数、系统集成及其优缺点的生物传感器比较综述[31]。
| 传感器类型 | 原理 | 可测量的 | 灵敏度 | 集成度 |
|---|---|---|---|---|
| 电位型 | 电阻变化 | 电压势/电流 | Less 敏感的 | 场效应管酶 |
| 安培法 | 电流大小作为时间的函数通过使用氧化和还原 | 电的电导 | High 敏感 | 生物的酸元酶识,素,别 和核酸,免疫传感器 |
| 电导法 | 能力的一个电解质以管理电流在电极之间 | 表面等离子体共振 | 相对地 low | 场效应管酶 |
| 光学 | 内反射,光学原理测量方法如荧光、光学光纤以及生物识别分子 | 压力变化加压速力度, | High 灵敏度 | 酶,抗体, 核酸, 动物细胞 |
| 压电 | 声振动, 石英晶体在特定频率下的振荡频率 | High 灵敏度 | 抗体, 酶 |
表 10.2 给出了生物传感器的优缺点。
| 优点 | 缺点 |
|---|---|
|
便携、体积小、成本低
适用范围广 响应时间短 高度敏感且稳定 |
高度依赖样品的化学性质
受温度和湿度影响 测量中的关键性 需要领域专业知识来分析样本 |
3 系统设计考虑
尽管已有足够的文献描述了各种生物传感器,但该系统需要在仪器仪表、通信及其控制方面实现适当的集成度。鉴于此,本节概述了所需的技术方面。
3.1 数据收集
在智能体感传感器网络(SBSN)中,来自用户身体部位的不同传感器的数据被流式传输。为了重新获得准确的推断,需要关联来自多个传感器的数据以监测用户的行为。所有生物传感器在网络中相互连接,以反映用户的生理表现。通过心率(HR)、体温和汗液传感器测量数据,以了解用户的行为表现。
然而,在数据收集过程中,主要问题集中在数据冗余以及同一传感器随时间产生的重放问题。由于传感器网络中存在的多种生理因素,网关处收集的数据无法直接使用。
网络的物理特性受位置、运动和环境的影响很大。网络在向量化有效数据以进行处理时会消耗更多的能量和时间,从而降低 SBSN 网络的寿命。考虑到这些因素,来自各种传感器的数据可能会受到安全干扰,进而需要进一步的预处理。在 SBSN 中,由于移动、手势、位置和连接性的变化,接收信号会出现失真。在实验系统时,必须谨慎处理这些因素。
收集到的数据被转换以进行计算,从而用变化、均方根、时域或频域、波形等方法对信息进行统计上的分类。为了从原始数据中提取特征向量,可以构建一个数学模型来执行该计算。根据用户的感知、位置和姿态,数据流可能会为用户产生失真值。
在 SBSN 的开发过程中,智能手机可用于在不同时间间隔收集传感器的数据。这引发了数据安全方面的另一个挑战性问题。为了应对可能的威胁,可在网关处收集的多级数据通过传输至公共云来确保安全。这有助于针对用户查询对获取的数据或处理后的信息进行隔离。然而,节点链路接口仍有可能遭受蠕虫洞、灰洞或汇点等攻击,从而损害网络。
3.2 数据聚合
由于高密度,会产生冗余数据包;数据聚合是体感传感器网络中的一个关键方面。汇聚节点收集的数据会导致性能降低和高能耗,最终缩短系统的寿命。
在任何传感器网络中,通信链路是使用传输协议传输数据的关键媒介,如图 10.2 所示。链路通信通常遵循通过性能标准来提高系统的效率。在专用系统中,可以通过传输层协议实现真实的数据通信。在无线传感器网络中,重复的数据传输、安全性和一致性是主要因素。

如图 10.3 所示,网络传输效率(NTE)、延迟、网络活动时间(NAT)、数据一致性、多租户、灵活性和响应时间(RT)是衡量网络性能以最大化系统准确性的属性[35]。

3.2.1 传输效率
它被定义为成功传输的数据与消耗的总能量之比。该属性反映了数据传输中能量的实时使用情况[23]。
$$ \text{Transmission efficiency} = \frac{\sum_{i=1}^{n} \text{Amount of data transferred}}{\text{Energy consumed in transmission}} $$
其中 n 是体感传感器网络中的节点数量。
3.2.2 网络活动时间
NAT 可以定义为节点完成数据聚合所需的时间,直到任一节点的能量耗尽为止[23]。
$$ \text{NAT} = \min(\text{NAT}_i) $$
当第一个节点耗尽能量时,NAT 结束。
NAT_i 是指第 i 个节点的网络活动时间,其中 i € I。
I 是体感传感器网络中除汇聚节点外的一组节点。
3.2.3 数据一致性
数据一致性是传输的绝对数据量与发送的总数据量之比的成功率。
$$ \text{Data consistency} = \frac{\text{Data delivered successfully}}{\text{Link data transmitted}} $$
3.2.4 延迟
La 传感器网络中的时延是数据连续传输所产生的延迟。
$$ \text{Latency} = \sum_{i=1}^{n} \text{Data reception-propagation delay} $$
3.2.5 可视化
数据可视化是一种将数据存储中的查询数据以不同格式表示的技术[25]。
3.2.6 多租户
多租户是一种操作模式,指的是用户在同一存储平台上共享独立实例[25]。
3.2.7 快速响应
快速响应是基于云的高计算身体网络中为服务用户查询或可视化数据所需的最小延迟。
在网内,汇聚节点处的数据聚合采用求和、均值、加权求和或极值函数(最小值、最大值)。这些技术将在数据存储与可视化中实现[26]。
3.3 数据存储
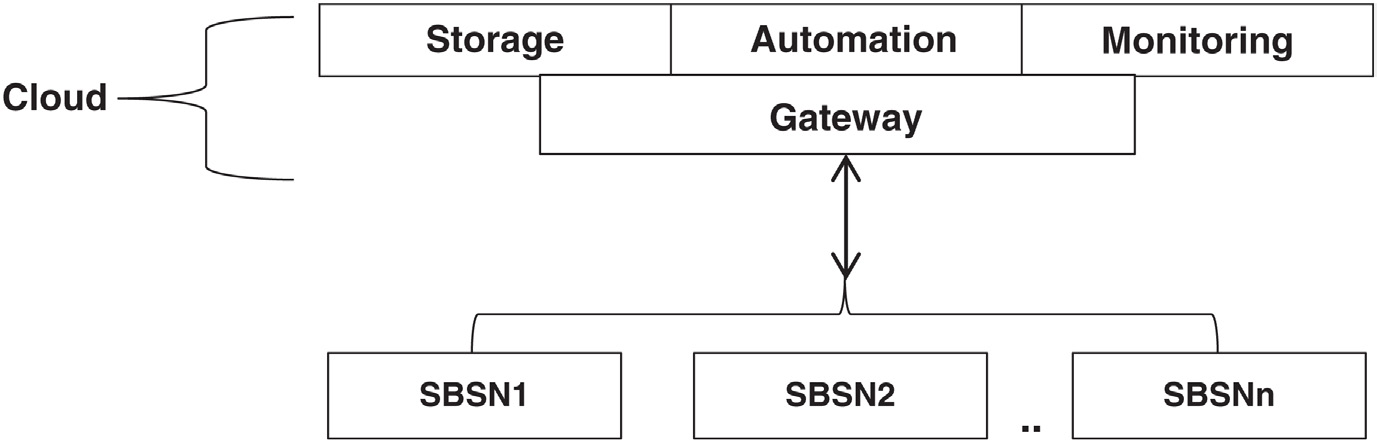
体感传感器网络接收各种时间序列的数据。分析这些数据会带来诸多挑战,因为每个传感器都有不同的感知模式。来自节点的流式数据无法在无线传感器网络内部由这些节点进行处理或管理。云服务提供了巨大的存储容量和处理平台,可以与体感传感器网络相连(图 10.4)。由于网关处的数据存储网络方式受限,云平台允许数据流在应用视角下得到容纳[26]。
没有云的系统可能会因运动、位置和环境变化而受到影响,缺乏多样性。因此,通过云“随行”,患者可以随系统移动而不会遇到任何性能障碍。此类系统具有高度可扩展性,并提供成本效益解决方案。
使用云存储可完成以下任务。
3.3.1 数据分析
云存储在可扩展的资源上累积用于处理和分析的各种时间序列的海量数据流。通过与网络中传感器兼容的一致平台,数据存储可以轻松获取。
3.3.2 可扩展性
具有云集成度的传感器网络允许大量节点转发数据,并适应特定模式。随着节点数量和用户的增加,云上的存储可以相应扩展。
3.3.3 协作
云存储可用于多个体域传感器网络的共享,且不受地理位置限制。在多租户环境中,多个用户可通过同一服务器进行访问,从而在云端实现隔离与隐私保护下的协作支持。
3.4 自动化
数据轮询和存储任务通过云以所需的布局实现自动化。这一举措减少了在目标服务器实例上手动整理数据的工作量。这些工具在云上的实例中自动配置,用于分类用户的特定数据。
3.5 监控
可穿戴体感传感器网络需要被监控,以向用户提供可靠的医疗辅助。无论用户身处何地,都需要持续监测其用户活动,而这一点可以通过云平台实现。
多个租户可通过虚拟环境进行有效管理,以支持平台即服务(PAAS)。
4 拟议的系统架构
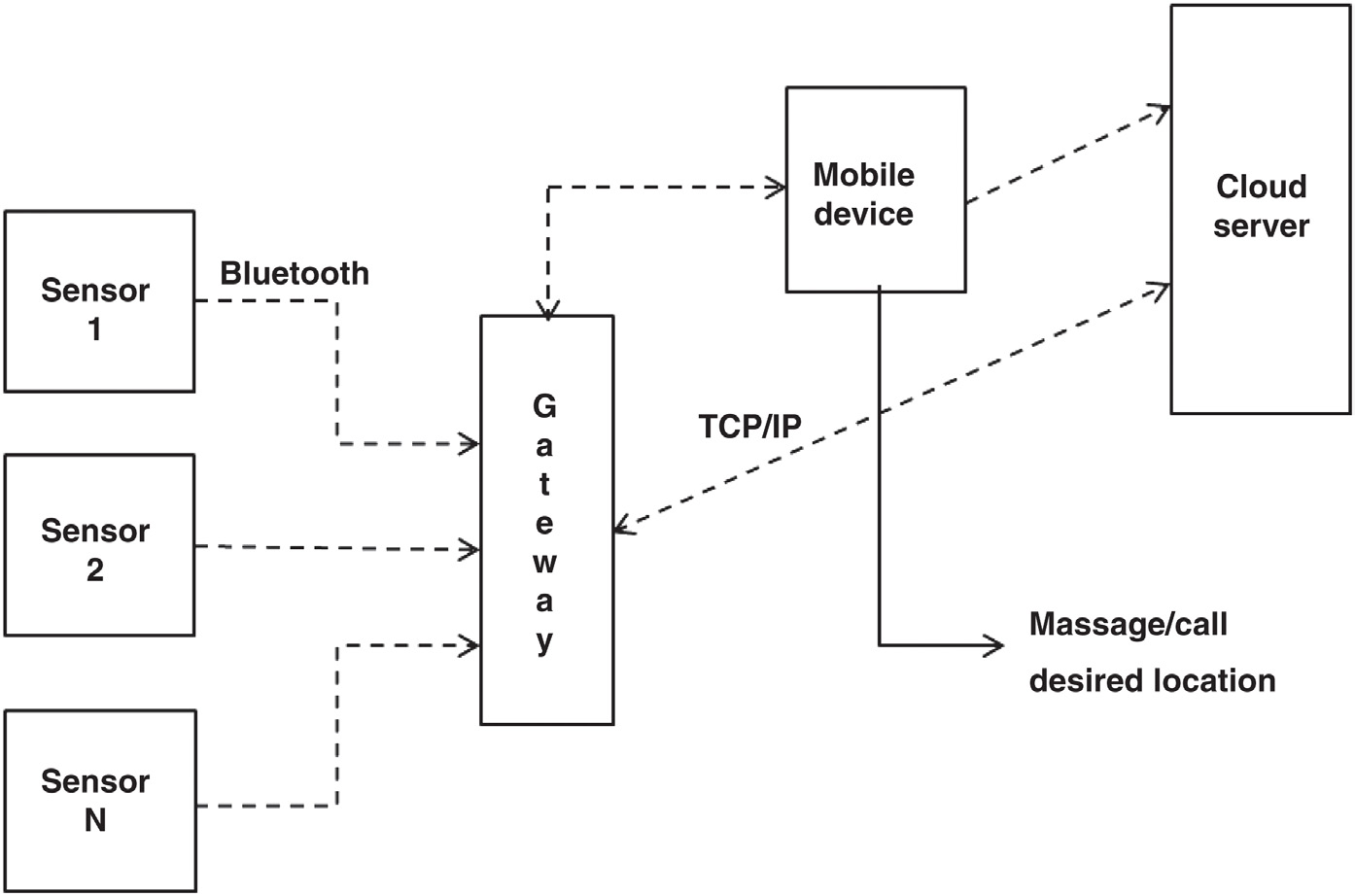
根据讨论,提出了一种系统,包括主要组件[36],如图 10.5 所示。
4.1 感知系统
多值参数需要在非稳态条件下进行测量,以检测异常。应在最小值和最大值范围内收集时间序列值作为实时数据。信号模式会根据生理因素而变化。因此,系统设计应考虑信号的容差值,同时不降低准确性[3]。
4.2 通信
在给定的时间间隔内,存储在云服务器上的传感器数据可以被监控和处理。
需要考虑短距离路由协议,以避免在目标服务器上出现传播延迟和数据兼容性问题。这些短距离协议可以来自有线或无线介质的接入方式,例如 Modbus、Zigbee、蓝牙等。
在这样的系统中,总往返时间和绝对数据都非常小;通信协议的选择应尽量减少链路上的控制包,增加数据包。
多参数值系统的实时数据需要从内网传输到云服务器。在这样的通信系统中,采用短距离 TCP/IP 的存储与处理网关是主要关注点。同样,这些设备应能够根据应用需求提高数据包投递率。数据可以是连续(实时)的、轮询的或流式传输的,这需要多功能多通道网关设备来完成任务。这显著减少了重传和扩散延迟。
4.3 皮肤电导传感器
通常,皮肤电阻会随着汗腺活动的变化而变化。这种皮肤的电学特性是判断用户特定健康状况的重要指标。
$$ \text{Conductance} = \frac{1}{\text{Resistance}} $$
皮肤电导可以通过电极电流来测量。
5 无线传感器网络中的攻击
由于无线网络依赖于通信介质,因此更容易受到攻击。攻击被恶意引入网络中,以降低网络性能。在体感传感器网络中,常见的攻击包括黑洞、汇点、重放和女巫攻击。
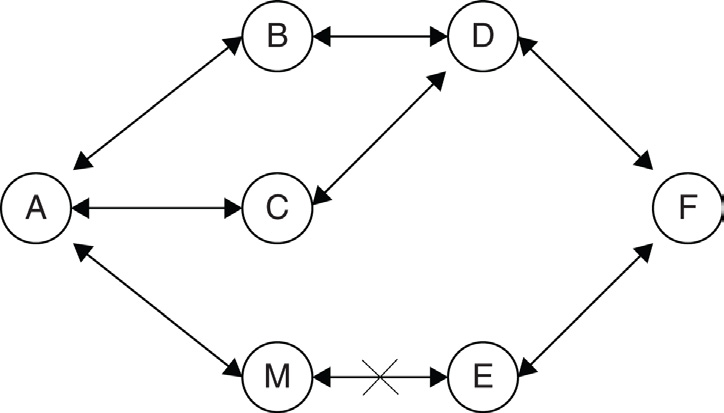
如图 10.6 所示,节点 A 向节点 B、节点 C 和节点 M 发送路由请求。节点 M 以高容量向节点 A 确认路由发现。在后续尝试中,节点 A 选择节点 M 进行进一步的数据传输。不幸的是,节点 M 是一个汇聚节点,会吸引其他节点转发数据。
这会导致网络中的恶意节点泄露数据机密性[4]。
除了汇点攻击外,体域传感器网络中的其他威胁也同样严重。由于此类网络中的节点数量非常有限,任何数据的丢失或篡改都会对健康预测和护理系统造成危害。通过在嵌入式系统中使用安全网关通道,可以将此威胁降至最小值。
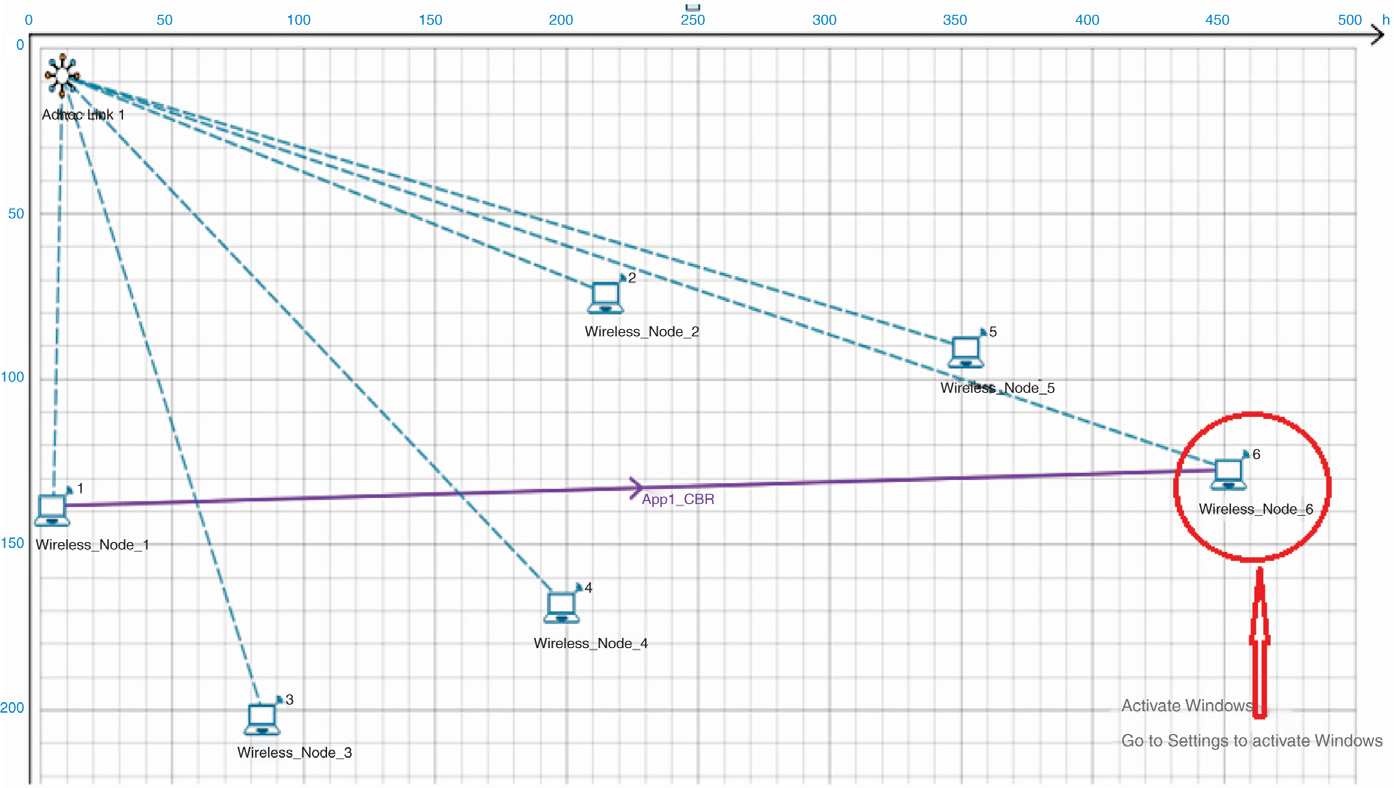
作为一项实验,在 Netsim 研究 v11.0 中实现了无线传感器网络场景中的汇点攻击,用于分析目的。表 10.3 列出了所使用的仿真参数,图 10.7 给出了仿真画布。
被圈出的恶意节点(节点 6)旨在路由发现过程中吸引其他节点。该攻击可通过目标节点的接收数据包数量来识别。
在图 10.8 中,目的节点接收到的数据包为零。这明显表明从源节点到目的节点的路由中断。
| 参数 | 值 |
|---|---|
| 仿真区域 | 500 × 500 m |
| 仿真时间 | 3600 秒 |
| 介质 | 无线 802.11.4 |
| 节点数量 | 06 |
| 应用 | CBR |
| 传输范围 | 30 m |
| 路由协议 | DSR |
| 能量模型 | 通用 |
| 消息大小 | 36 字节 |

6 建议的设置
所提出的设置是生物传感器网络中的基本要求,旨在延长用户寿命。该系统适用于平均年龄组。体感传感器包括呼吸传感器、脉搏监测传感器和南卡罗来纳州(SC)。传感器网络用于持续了解用户在时间和位置上的状态。集成系统为盲人设计的传感器拐杖,该拐杖配备超声波传感器以及身体上的可穿戴体感传感器。
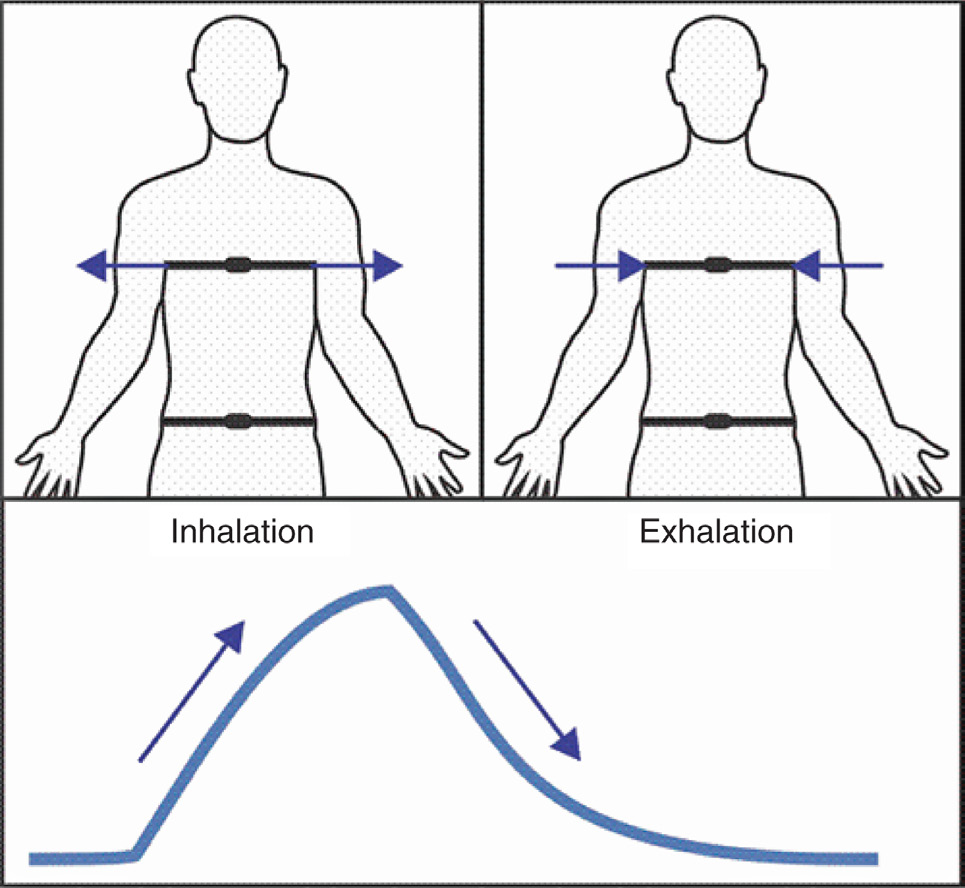
6.1 呼吸传感器
吸气和呼气是呼吸判断记录的功能参数。图 10.9 展示了一些样本活动和相关观察,这些可以在时间间隔内进行解释,以测量腹部尺寸的振幅上升(通常以毫米为单位)。
6.1.1 传感器原理
基于拉伸,传感器带通过腹部区域的上升和下降或扩张与收缩产生信号模式。
在选定的时间段内观察该信号模式,以了解在可区分的情况下的呼吸及所做的功。
6.1.2 传感器放置
传感器带通常放置在腹部,或可选择放置在胸部。可以将传感器同时放置在这两个位置,以从腹部和胸部的升降模式中获得更高的准确性。
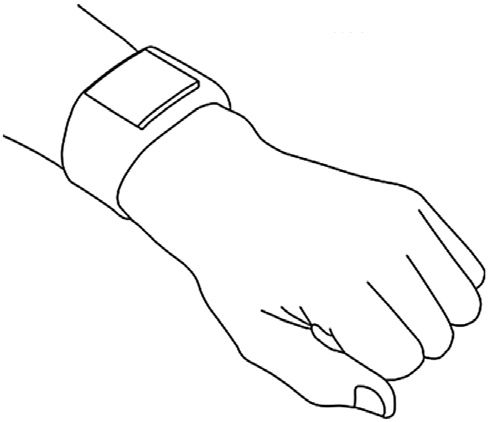
6.2 心率传感器
可以使用传感器测量心率,以了解身体在极值(最小/最大)振幅下的生理状态(图 10.10)。
6.2.1 工作原理
心率传感器检测给定样本中的最高振幅。通过在一定持续时间内获取大量样本,可以提高心率的精度。
6.2.2 传感器放置
带绑带的传感器应紧贴腕骨放置,如图 10.10 所示,与身体或皮肤接触。在剧烈活动时,传感器绑带应明显收紧;在静止状态时,则应足够放松,以测量准确心率[37]。
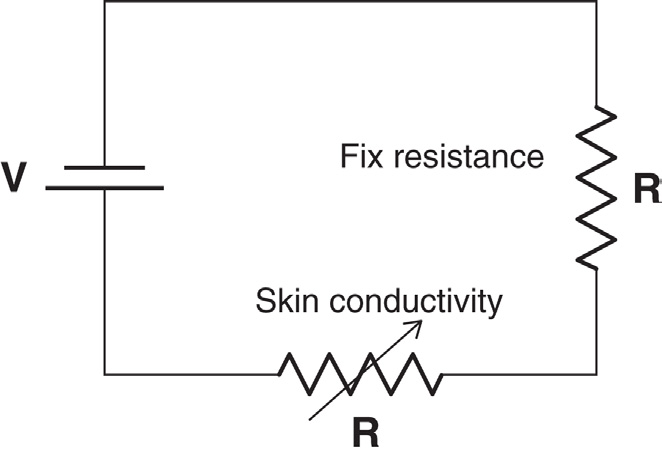
6.3 皮肤电导率
南卡罗来纳州是衡量一个人的压力、工作负荷或活动的指标。导电性越高,人身体所承受的压力就越大。
6.3.1 工作原理
由于皮肤具有导电性,需在手掌上施加微小电势。这有助于形成电路,使电荷从一个点传输到另一个点。根据紧张程度,人在压力下的行为会被系统检测到。
6.3.2 传感器放置
南卡罗来纳州传感器可根据用户的方便程度放置在手指(图 10.11)、脚趾或手掌处。通过将电路放置在手掌上以获得最大手掌表面积,可确保测量的准确性。
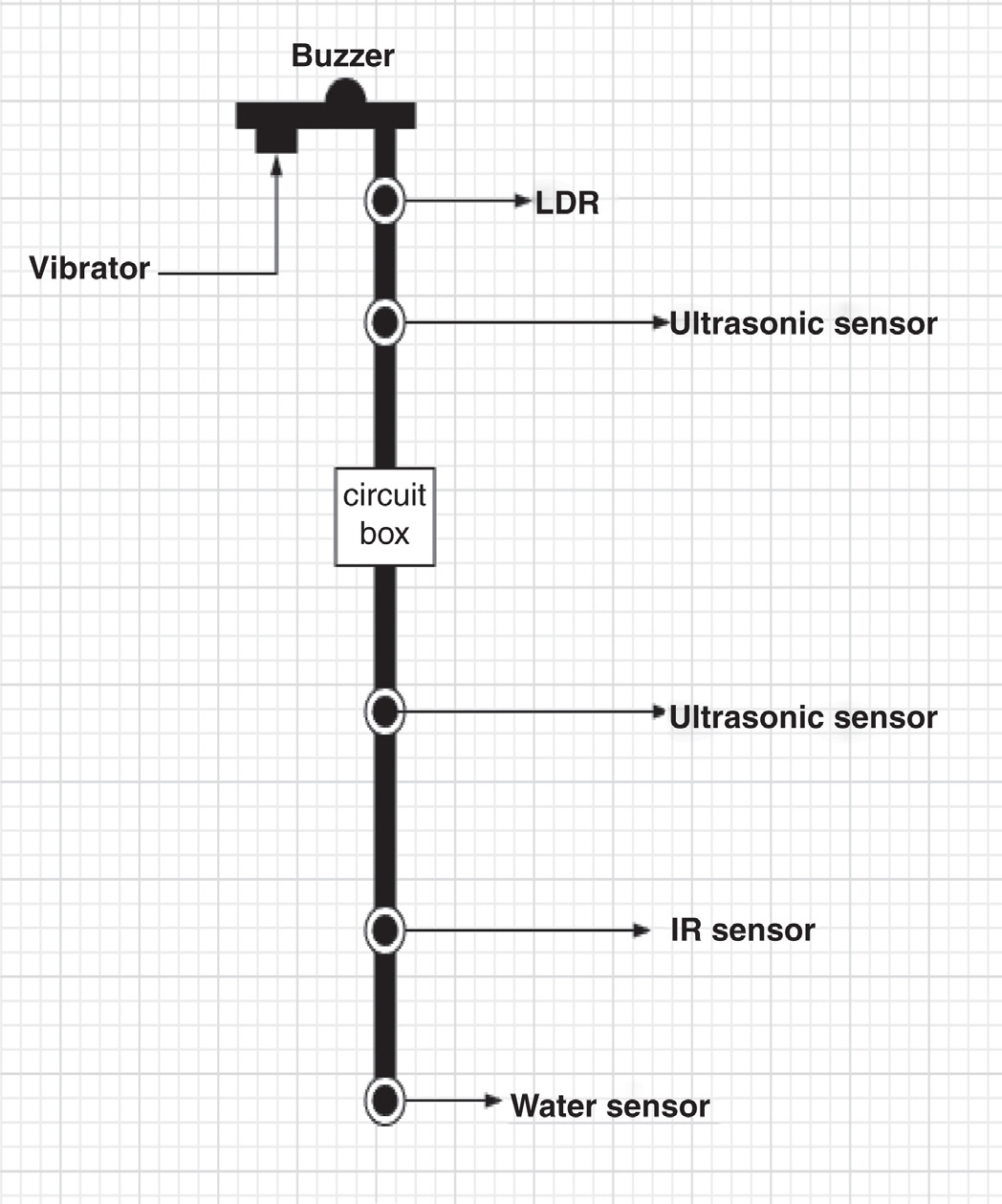
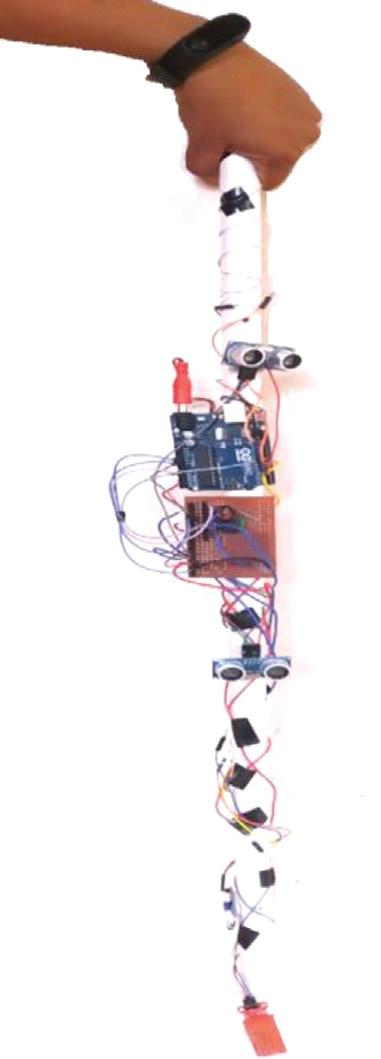
6.4 盲人智能拐杖
一种以拐杖形式设计的辅助设备,专为盲人使用者而设计。该设备基于人体的呼吸传感器、脉搏监测传感器和南卡罗来纳州(SC),利用这些信号来监测身体的生理状态。图 10.12 展示了这一理念。图 10.13 是在实验室中实际构建的拐杖。尽管目前传感器安装并展示在拐杖外部,但在商业产品中可将其容纳于拐杖内部。
智能拐杖可用于探测路径中的远近障碍物。通过传感器自动测量障碍物距离,以避免盲人在行进路径中发生碰撞。该辅助设备还集成了身体传感器网络,用于判断人的恐慌阶段。感知参数的值取决于性别和年龄,并用于初始校准。
配备其他传感器的智能拐杖有助于盲人顺畅移动。水传感器可帮助识别路面是否有积水或湿滑情况,并在步行时提醒用户改变路径或采取相应措施。
红外和超声波传感器用于检测行进路径中的障碍物,传感器的布置方式使其能够指示出行进路径中障碍物的大小和位置,即使障碍物悬挂在离地面几英尺的高度也能检测到。通过振动或声音提示的警报可区分这些不同情况。
LDR 传感器的作用仅仅是向用户告知周围光线条件,因为这些光线条件可能会影响传感器的工作。这可以帮助盲人采取额外预防措施,而不是完全依赖光传感器。
如表 10.4 所示,针对年龄大于 10 岁的用户,列出了传感器参数的下限和上限阈值。
这些传感器之间的依赖关系是线性的,可显著提高判断用户状态的可靠性[7,8]。
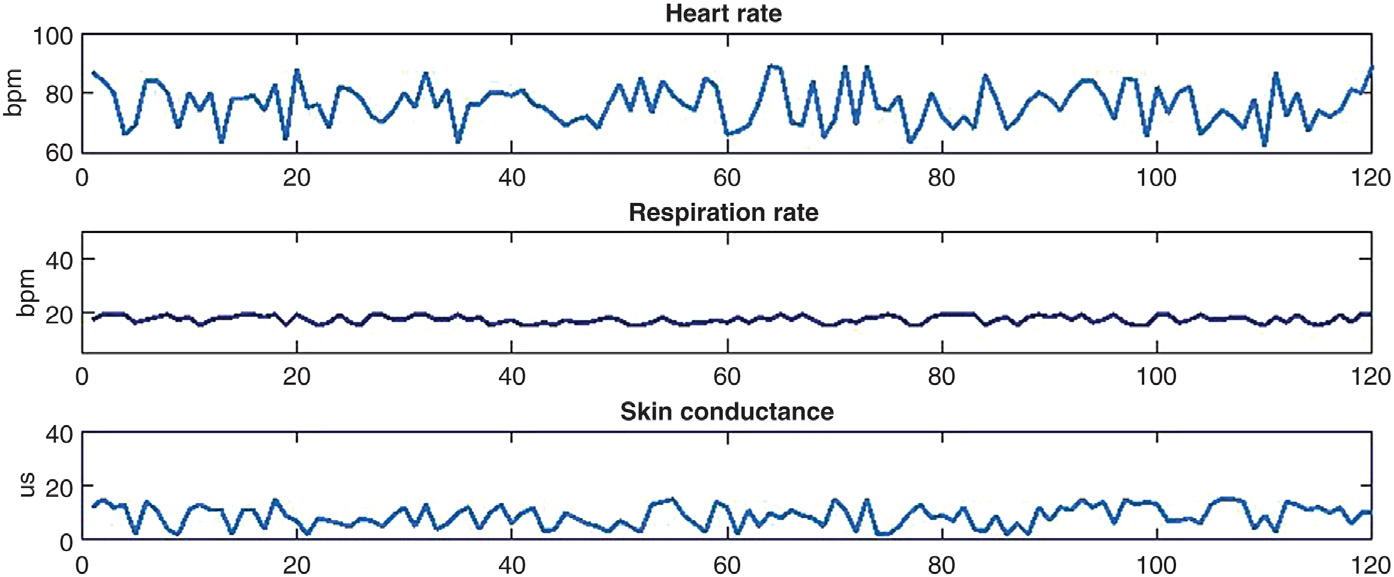
选择这三个参数是因为它们在参数值上的关系以及存在适合设计的可穿戴传感器。心脏通常每分钟跳动 60–90 次,呼吸频率约为其五分之一。皮肤电导取决于这两个参数,因为心率(HR)增加会导致出汗,从而影响皮肤电导值。这种关系被用于识别传感器的异常行为以及由医学疾病引起的实际参数变化。
7 结果与分析
结果显示了三个参数模式。参数值的变化用于识别传感器异常和实际医学疾病。图 10.14 显示正常信号模式。
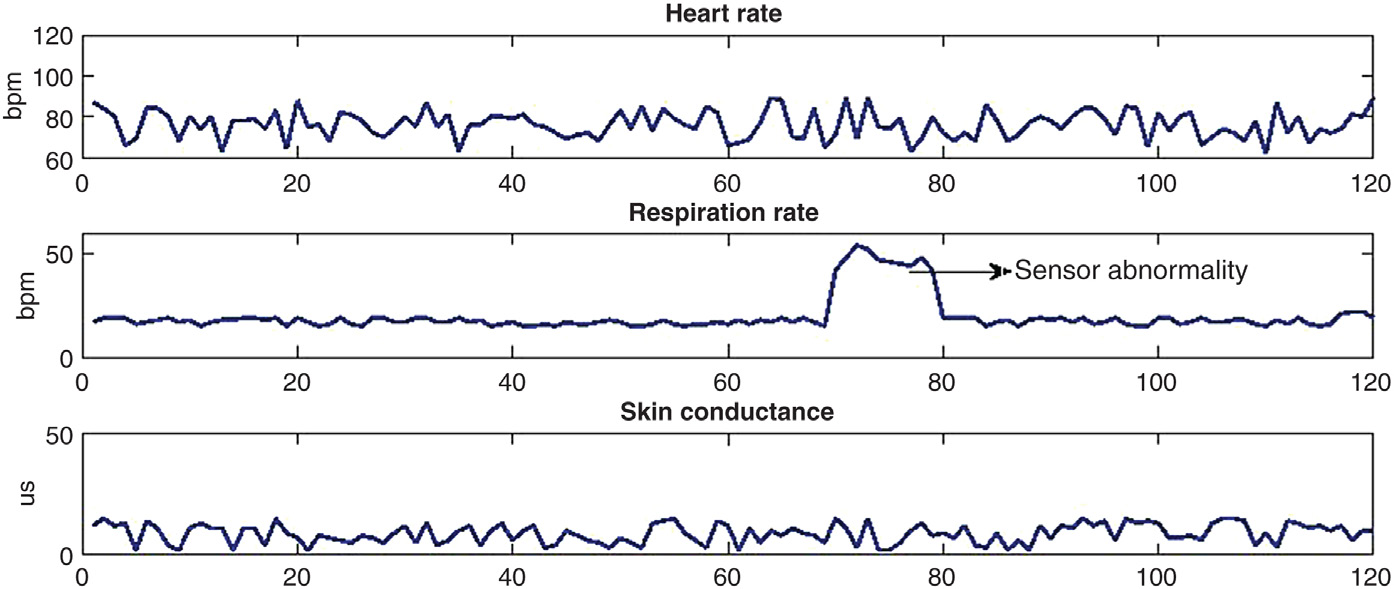
图 10.15 显示了来自单个传感器的值,这些值正在急剧变化,并表明传感器出现异常。
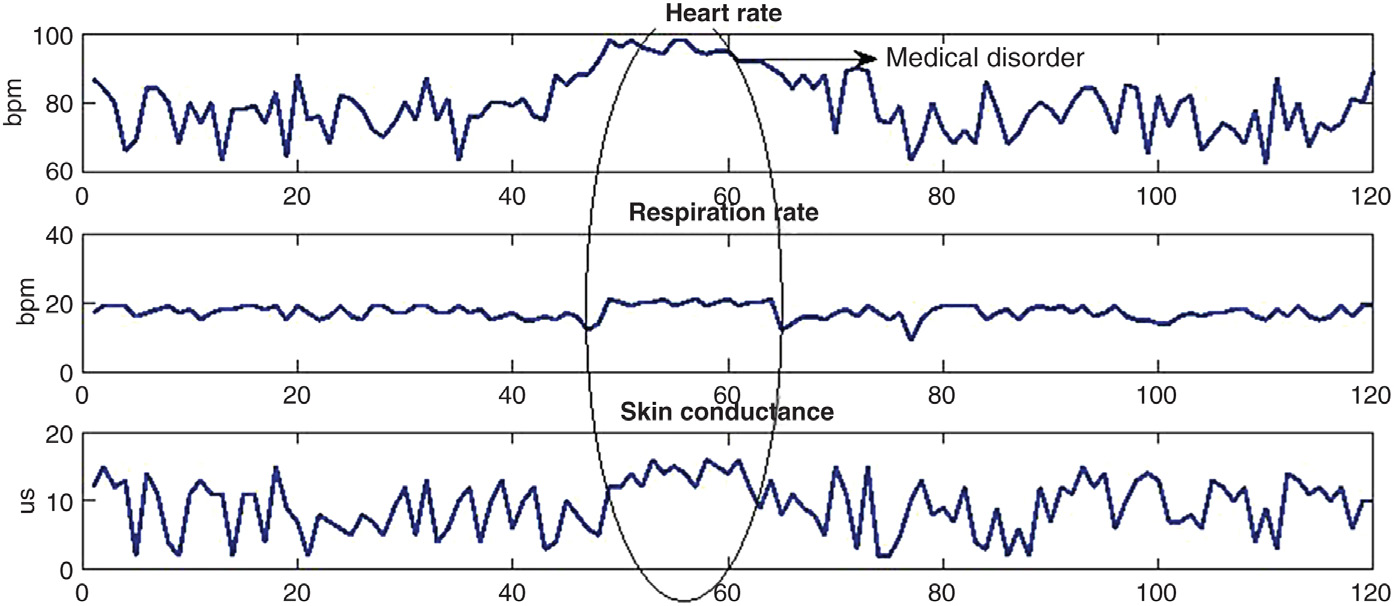
在图 10.16 中,参数值的变化反映在所有三个传感器值中,从而正确检测出医学疾病。
这些参数值取决于人在休息、步行或运动时的情况,通过在一段时间内根据设定的阈值测量这些参数,并基于均值和偏差进行计算,从而用于进一步的控制。
该算法用于信号预处理和决策支持。
算法
%% 预处理流输入信号 i=1 到 n RRi, HRi, SCi 在时间 t 上;
对信号进行预处理,使用低通滤波器 LPF (RRi, HRi, SCi);
LPF,低通滤波器 → 降采样 → 峰值提取 → 高通滤波器 HPF (降采样);
HPF,高通滤波器 → 分类 → 历史数据分析 RRi, HRi, SCi;
数据模式分析 RRi, HRi, SCi;
%% 决策判断
如果 (RRi && HRi && SCi == 1) 健康状态;
否则 恐慌状态;
在云中收集的数据采用之前所述的算法进行处理。对接收信号进行低通滤波器操作,以衰减该模式并使其平滑用于数据分析的信号。从高通滤波器中提取信号的峰值,以确保获得最大的振幅。通过在云上进行历史数据分析,对数据进行分类,以了解用户在特定情况下的行为模式。对接收的一段时间内的呼吸率 (RR)、心率 (HR) 和皮肤电导 (SC) 数据进行逻辑检查,判断其是否达到真正的阈值,从而确定用户的健康状态或恐慌状态。
所设计的系统在中年人身上进行了测试。测量了正常状态和恐慌状态下的呼吸频率、心率和南卡罗来纳州。设置 10 分钟的时间段以在云上记录流式传输的数据。
7.1 正常状态
呼吸频率、心率和南卡罗来纳州传感器的位置如图 10.9–10.11 所示,分别为对一个人进行测量。通过对该人三个属性的观测,同时验证多值依赖统计。
如表 10.5 所示,用户在低噪声环境中接受监测。盲人在行程中的传感器记录被上传至云进行处理。通过移动 GPS 记录该人的位置,以便在紧急情况下进行联系。对每个传感器的最小值和最大值进行处理,以检查参数值之间的依赖关系。所有记录的数据值均根据云上表 10.4 所示的标准指标相互验证。
7.2 恐慌状态
表 10.6 表示通过传感器之间的逻辑依赖关系来检测紧急情况。传感器参数彼此呈线性变化。用户的位置将发送至自动拨号号码,以便采取进一步必要的预防措施。
自动拨号号码被激活,以向用户的看护人显示恐慌阶段的响应。
7.3 异常状态
如表 10.7 所示,呼吸率值从最小到最大变化,显示出异常传感器行为。该情况在算法中被描述为传感器故障,而非用户的健康问题。
这些是用于验证系统响应的测试用例,旨在通过体感传感器网络和存储平台实现高可靠性的端到端服务提供。
|
表 10.4 身体参数范围
|
|------------------------|-------------|-------------|
|
阈传感器
|
下限阈值
|
上限阈值
|
| 呼吸频率 | 12 次/分钟 | 20 次/分钟 |
| 心率 | 60 次/分钟 | 100 次/分钟 |
| 皮肤电导率 | 2 µs | 20 微西 |
|
表 10.5 正常状态下的身体参数范围
|
|-----------|------------|------|------|--------|--------------|
|
参数
|
时间段
|
Min
|
Max
|
活动
|
位置
|
| RR | 10 分钟 | 12 | 17 | 步行 | 当前 GPS 点 |
| HR | 10 分钟 | 98 | 101 | 步行 | 当前 GPS 点 |
| SC | 10 分钟 | 3 | 9 | 步行 | 当前 GPS 点 |
|
表 10.6 恐慌状态的身体参数范围
|
|-----------|------------|------|------|--------|--------------|
|
参数
|
时间段
|
Min
|
Max
|
活动
|
位置
|
| RR | 10 分钟 | 6 | 8 | 步行 | 当前 GPS 点 |
| HR | 10 分钟 | 62 | 72 | 步行 | 当前 GPS 点 |
| SC | 10 分钟 | 18 | 24 | 步行 | 当前 GPS 点 |
|
表 10.7 传感器异常的身体参数范围
|
|-----------|------------|------|------|--------|--------------|
|
参数
|
时间段
|
Min
|
Max
|
活动
|
位置
|
| RR | 10 分钟 | 6 | 8 | 步行 | 当前 GPS 点 |
| HR | 10 分钟 | 79 | 95 | 步行 | 当前 GPS 点 |
| SC | 10 分钟 | 4 | 6 | 步行 | 当前 GPS 点 |
8 备注
本章节比较了各种生物传感器,重点讨论了这些传感器如何在系统中与可穿戴体感传感器结合使用。通过使用多传感器,可以明确区分实际医学疾病与传感器故障或异常。采集的数据需要进行预处理并存储于云中,以实现安全访问。该应用针对配备可穿戴传感器和智能拐杖的盲人设计,利用现有的智能手机设备监测身体状况及相关参数之间的关系,以识别盲人是否处于异常或紧急情况。同时有助于确定盲人的位置。因此,系统可采取立即行动,确保提供及时医疗援助。
9 未来展望
在本章节中,RR、HR 和 SC 是用于判断身体残障人士生理状态的指标观测。
提出的工作主要针对盲人,但可扩展至其他疾病领域并考虑年龄因素。紧急情况下的医疗援助可以添加到现有医疗系统中。目前,该系统已在单个网络上进行了测试,未来可扩展至分布式网络中的云端多个租户。

















 762
762

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









