




一、电机死区
下图是六步换相的开关顺序图:S1、S3、S5 我们称为上管,S2、S4、S6 为下管。
可见,在无刷电机驱动中,不能出现 S1 和 S2、S3 和 S4、S5 和 S6 两两同时导通的情况,因为这样会使电流在上下管之间形成回路,这样并不能驱动电机,还会直接烧毁 MOS。
我们如果要对这六颗 MOS 进行 PWM 驱动,并不需要单独控制六颗,我们只需要配置三个 PWM 输出,然后再由 MCU 生成与之相反的互补的 PWM 即可,其中互补的 PWM 波形保证不会出现上下管同时导通的情况。以S1 和 和 S2 波形距离,应该如下图这样:
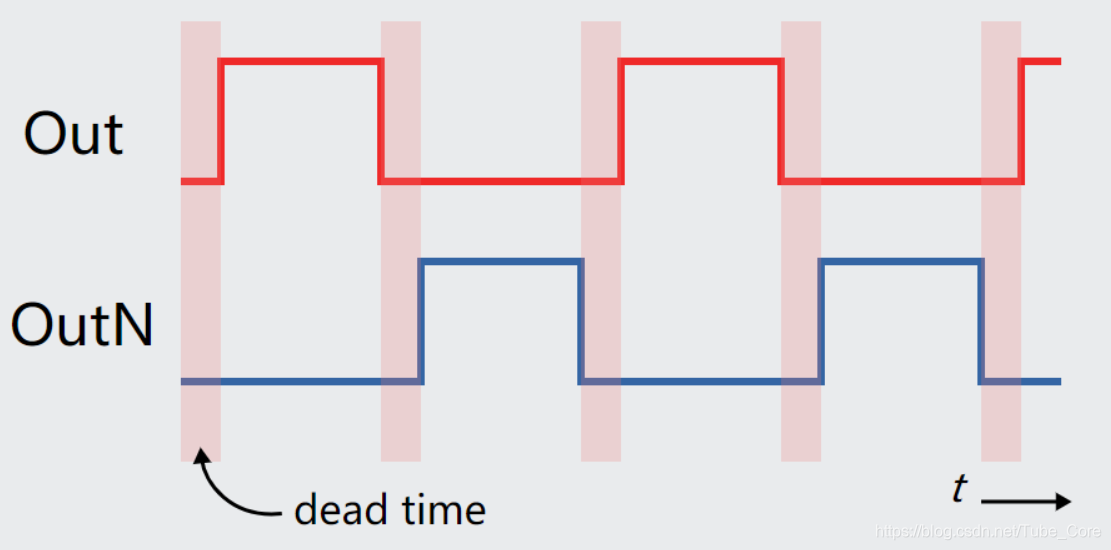
为了确保上下管不会导通,我们往往会再互补波形中设置一个死区时间 (dead time) 留出一些余量。
至此,我们仅需要设置三个 PWM 的周期,占空比,并且配置为互补模式和互补的死区时间,即可完成 MCU 对一个无刷电机的 PWM 外设驱动配置。
二、死区设置后电流波动存在原因
2.1 补偿前后波形对比
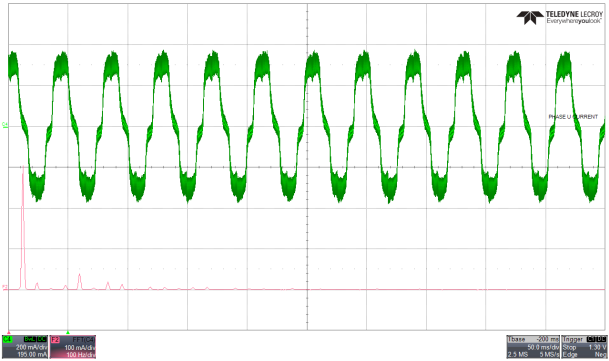
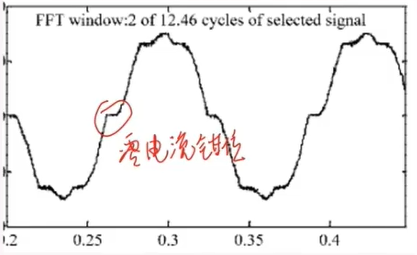
在这里截取 TI 的应用笔记截图 (ZHCABA0),以下是没有死区补偿的相电流,可见在过零点的时候产生了一个类似于台阶的电流波动。
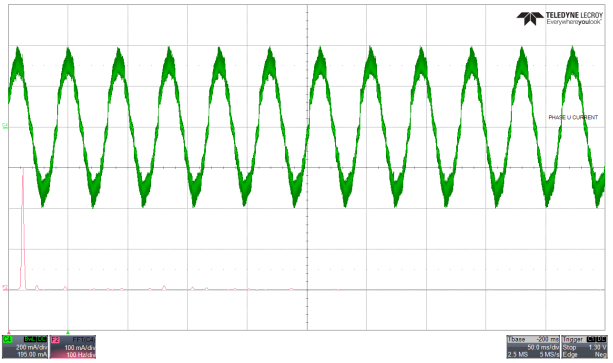
下图则是开启死区补偿时的相电流波形图:
2.2 死区的影响
PWM 插入死区时间,防止上下开关器件同时导通损坏器件,也会引起波动畸变和转矩脉冲,降低系统性能。
影响原因如下:
- 死区时间越长,逆变器输出基波电压损失越大,电压波形畸变程度越大,堵在基波下降最多,电流波形畸变越严重。
- 死区时间固定,如果负载功率因数变小,会使一边去输出基波电压幅度增加,电压谐波畸变较小,基波电流幅值减小,电流波形影响率会变大。
- 当输出电压较低时,空间电压矢量幅值很小,开关器件相对导通时间变短,死区时间影响变大。
- 死区不仅影响输出电压幅值,还影响相位,使 PWM 波形不再对称于中心,周期空间电压矢量幅值产生偏差,相位也发生变化。
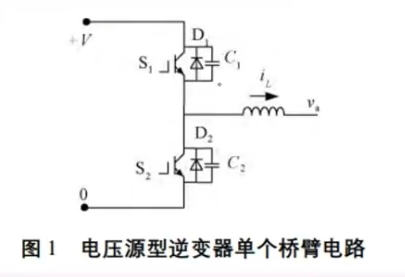
2.3 零电流钳位
在死区时间内,电流由二极管续流,不管电流是什么方向,电流的幅值向零方向减少。如果在死区开始时电流幅值接近于零,则当电流下降到零以后,由于二极管承受不了反电压,阻止了电流的反向流动,在剩余死区时间内,电流将保持位零。
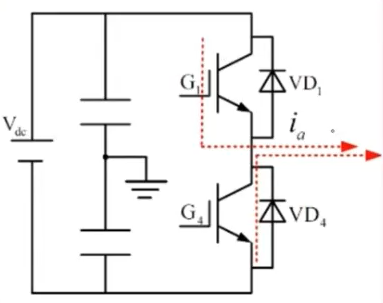
如下图所示,

大电流时 (远离零点)
电流方向明确,不管死区多长,电流都会坚定地走某一边的二极管 → 桥臂电压只产生一个恒定的偏移 (可以通过补偿修正)。
小电流时 (零点附近)
电流方向不稳定,可能随时正负切换,甚至瞬间为零。在死区的空档期,控制器想让上管导通,但电流可能还没换向过来 → 结果二极管继续钳住电压。如果电流方向正好要反向,而桥臂两边的二极管都不情愿导通,就会出现短暂的悬空或错误钳位。
三、死区补偿方法
3.1 平均电压补偿法
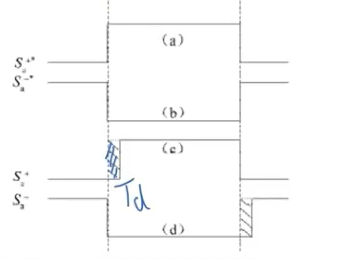
上图是虚线部分是电机死区时间,由此可得出一个周期内的平均死区导致的误差电压为:
= 因为死区导致的误差电压
= 死区时间 (Dead-time)
= 周期时间
= 母线电压
如果我们把 mos 的开关管时间也计算进去后可得误差电压:
= 开管所需的时间
= 关管所需的时间
= 调制后的电压
我们将 带入到三项当中,得到
,再将其带入到三相补偿公式中。
最终我们的三项补偿电压公式可得:
= 死区时间
= 补偿电压
其中 函数定义如下:
在上面公式当中:
这一部分是为了确定补偿电流方向,其中电流方向示意如下图:
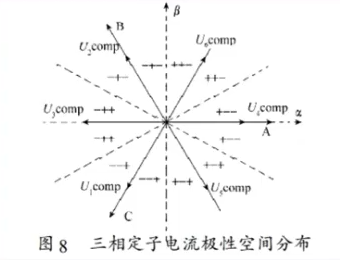
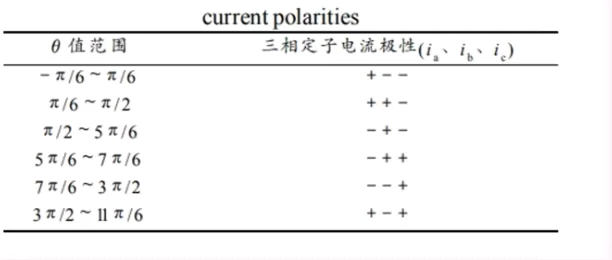
死区使得逆变器输出电压平均值偏小/偏大。偏差的正负取决于电流方向 (由 决定)。所以,补偿就是:按照电流方向,把一个与死区成比例的电压加到参考电压上,从而抵消误差。
也就是:
-
> 0 → 电流从逆变器流向电机 → 上管导通为主。
-
代码演示:
#include <math.h>
// 输入参数
float Udc; // 母线电压 (V)
float Ts; // PWM周期 (s)
float Td; // 死区时间 (s)
float Ia, Ib, Ic; // 三相电流 (A)
float Ualpha_ref, Ubeta_ref; // 原始调制电压 (αβ坐标)
// 输出参数
float Ualpha_cmd, Ubeta_cmd; // 补偿后的调制电压 (αβ坐标)
// 符号函数
static inline float sign(float x)
{
if (x > 0.0f) return 1.0f;
if (x < 0.0f) return -1.0f;
return 0.0f;
}
void DeadTime_AvgVoltComp(void)
{
// ==========================
// 1. 计算电压补偿量 (abc)
// ==========================
float Uerr_a = (Td / Ts) * Udc * sign(Ia);
float Uerr_b = (Td / Ts) * Udc * sign(Ib);
float Uerr_c = (Td / Ts) * Udc * sign(Ic);
// ==========================
// 2. Clarke变换到 αβ坐标
// ==========================
float Uerr_alpha = (2.0f/3.0f) * (Uerr_a - 0.5f*Uerr_b - 0.5f*Uerr_c);
float Uerr_beta = (2.0f/3.0f) * ((sqrtf(3.0f)/2.0f) * (Uerr_b - Uerr_c));
// ==========================
// 3. 在 αβ 坐标上补偿
// ==========================
Ualpha_cmd = Ualpha_ref + Uerr_alpha;
Ubeta_cmd = Ubeta_ref + Uerr_beta;
}
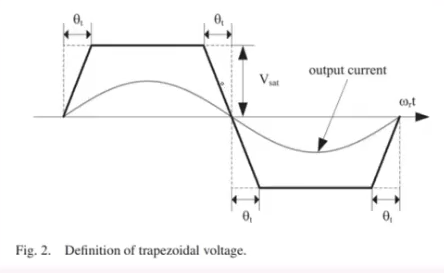
3.2 线性补偿法
平均电压补偿法的补偿波形实际上是方波,因为补偿量受到 影响。以上计算方式仅考虑了
和
反向二极管,然而在实际情况下我们也需要考虑到
和
电容充放过程,所以我们抛弃平均补偿法这种方波补偿,从而使用梯形电压补偿即可解决。
其与平均电压补偿法的区别就是,不再使用 函数,而是使用:
-
-
= 死区补偿增益(标定参数)
-
= 相电流
-
= 电流缩放系数
线性补偿的波形如下:
代码如下:
#include <math.h>
// ===================== 参数定义 =====================
#define VDC 24.0f // 母线电压 (V)
#define Ts 1e-4f // PWM周期 (s)
#define Td 2e-6f // 死区时间 (s)
#define Kdead (VDC * Td / Ts) // 死区补偿基准系数
// ===================== 输入量 =====================
// 三相电流 (A),来自ADC采样
float ia, ib, ic;
// αβ电压 (控制器计算得到的期望值)
float Ualpha_ref, Ubeta_ref;
// ===================== 输出量 =====================
float Ualpha_cmd, Ubeta_cmd; // 补偿后的电压指令
// ===================== 死区补偿函数 =====================
static inline float deadtime_comp(float i_phase)
{
// 线性补偿:电流越大,补偿越大
// 正负方向决定补偿符号
return Kdead * (i_phase / 10.0f);
// 分母 10.0f 只是一个缩放,避免补偿过大,需要标定
}
void DeadTime_Comp_Linear(void)
{
// 计算三相补偿电压
float Ua_comp = deadtime_comp(ia);
float Ub_comp = deadtime_comp(ib);
float Uc_comp = deadtime_comp(ic);
// Clarke 变换,把补偿量投到 αβ 坐标系
float Ualpha_comp = (2.0f/3.0f) * (Ua_comp - 0.5f*Ub_comp - 0.5f*Uc_comp);
float Ubeta_comp = (2.0f/3.0f) * ((sqrtf(3)/2.0f) * (Ub_comp - Uc_comp));
// 补偿到电压指令
Ualpha_cmd = Ualpha_ref + Ualpha_comp;
Ubeta_cmd = Ubeta_ref + Ubeta_comp;
}


















 2万+
2万+


 到【灌水乐园】发言
到【灌水乐园】发言








