




一、滑模控制
1.1 滑模控制器概述
滑模控制是一种非线性控制方法。它的核心思想是:在状态空间中设计一个滑模面 (sliding surface),比如:
= 状态的某种组合 (比如速度误差、电流误差)
如果 是速度误差函数,所谓滑模面也就是速度误差等于 0 的情况。通过控制律让系统快速到达这个面,以速度误差举例,就是让其误差快速到达 0。一旦到达滑模面,系统就沿着这个面移动,最终达到收敛状态。
换种通俗的例子:给系统设计一条轨道 (滑模面),不管它一开始在哪,控制器都会强行把它推到轨道上,并且保证它沿轨道滑到终点。
1.2 滑模控制举例
1.2.1 滑模控制调速案例引入
我们考虑一个直流电机调速的场景,用滑模控制给直流电机调速。
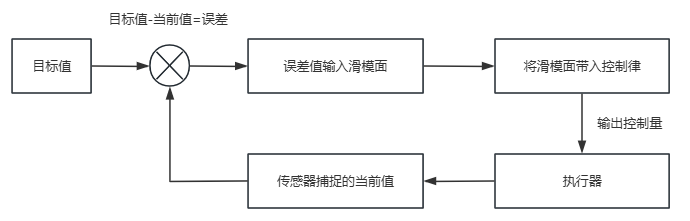
其流程是
- 定义误差 (目标速度减去当前速度)
- 将误差输入滑模面 (将误差求积分,但是滑模函数的目标值 = 0)
- 滑模面输入控制律,控制律输出调速电压。
- 捕捉当前速度,计算误差。
1.2.2 定义误差
= 目标速度
= 实际速度
1.2.3 设计滑模面函数
= 积分权重
其滑模函数 = 0,也就是相当于我们的理想情况下应该是 0 误差的。
1.2.4 控制律
实际施加到系统上的控制输入 (在这里是电压)
= 等效控制电压 (在这里可以是通过电机的 KV 计算的电压)
= 滑模增益系数
= 符号函数,内的 s 就是我们的滑模面函数
其中 函数定义如下:
其中这个等效控制电压 相当于是在理想情况,无外部干扰的对应关系。比如使用电机的 KV 值直接算出来的速度。但是通常来说电机不仅会带载,还会发热,这些都会影响到 KV 值的参数。其控制律就是利用这个值和误差累加做差得到的。我们的等效控制值越准,整个系统的性能就越好。
1.2.5 离散化后代码演示
下面代码是滑模控制器控制电机速度的代码:
// 参数
float lambda = 50.0f; // λ 系数
float Ts = 0.001f; // 采样周期 (1 kHz)
float K = 2.0f; // 切换增益
float Kv = 1000.0f; // 电机常数 [rpm/V],需要根据电机实际参数修改
// 变量
float e; // 误差
float e_int = 0.0f; // 误差积分
float s; // 滑模面
float u; // 控制输入(电压命令)
// 滑模控制函数
float sliding_mode_control(float ref_speed, float meas_speed)
{
// 计算误差
e = ref_speed - meas_speed;
// 误差积分 (离散积分)
e_int += e * Ts;
// 滑模面公式 s = e + λ ∫ e dt
s = e + lambda * e_int;
// 等效控制:补偿反电动势 (简单模型)
// Kv [rpm/V] -> 转速除以 Kv 得到所需电压
float u_eq = meas_speed / Kv;
// 切换控制项
float u_sw = -K * (s > 0 ? 1.0f : -1.0f);
// 总控制律
u = u_eq + u_sw;
return u; // 输出电机电压命令
}
1.3 滑模切换面和滑模运动过程图解
1.3.1 滑模切换面
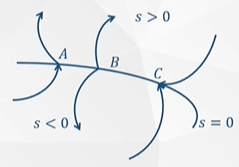
这张图是滑模控制 (Sliding Mode Control,SMC) 里面常见的切换面 (Switching Surface) 上三种典型点的特性示意图。
含义如下:
- 横线 (s = 0):表示切换面 (switching surface)。
- s>0、s<0:表示系统状态在切换面两侧的区域。
- A、B、C 三个点:表示系统轨迹与切换面相交或接触时可能的三种情况。
A 点 (穿越点):
-
系统状态从 s<0 一侧穿到 s>0 一侧。说明滑模控制律设计得不好,轨迹没有被吸引到切换面,而是直接穿过去。不会形成滑模运动。
B 点 (驻留点 / 临界点):
-
系统状态到达切换面时,切换面的法向速度分量为 0。表示轨迹在切换面上既不进入也不离开,可能停在边界上。稍微扰动就会跑到一边去,不稳定。
C 点 (到达点 / 吸引点):
-
系统状态到达切换面,并被两侧的控制力推向切换面。说明系统设计合理,轨迹最终会被“吸附”在切换面上,形成稳定的滑模运动 (Sliding motion)。这是滑模控制希望达到的状态。
1.3.2 滑模运动过程
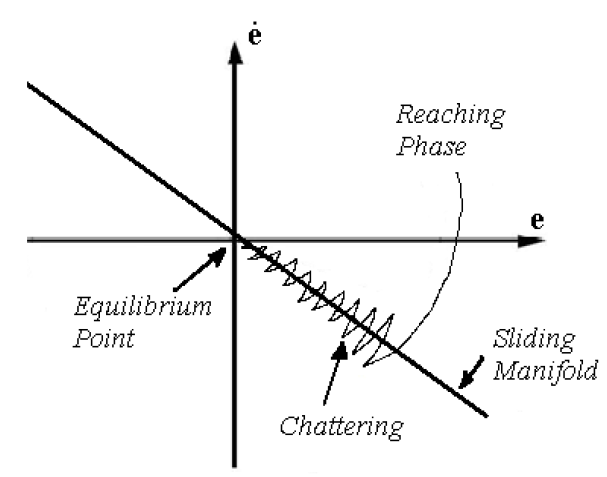
这个图也是 滑模控制(Sliding Mode Control, SMC) 的典型示意图,展示的是系统状态轨迹在切换面上的运动情况。
滑模面的横纵分别是误差和和归零的导数,也就是误差和误差变化率。误差越大,变化率就越大,在滑模面这种理想情况下是呈线性关系的,但是我们控制的线回归零点却是曲线,一定要梳理好这张图的关系!!!
坐标轴:
- 横轴 (位置/误差)
- 纵轴 (速度/误差导数)
直线 :
- 切换面,也叫滑模面。它是设计出来的,使得当轨迹被吸引到这条线上后,系统误差可以稳定收敛。
曲折的轨迹:
- 系统状态
由初始点开始,受控制律作用逐渐靠近并贴合在切换面
上。
箭头方向:
- 表示在切换面上系统状态沿着轨迹向原点 (平衡点) 运动。
Reaching Phase(到达阶段)
- 系统状态最开始不在滑模面上。控制律会驱动它逐渐靠近滑模面。
Sliding Mode(滑动阶段)
- 状态一旦进入滑模面(黑线)附近,就被“粘住”,沿着黑线往原点移动。这就是滑模。
Chattering(抖振)
- 由于控制输入的开关特性,系统不会严格落在黑线上,而是会在黑线附近高频抖动。这就是图上画的锯齿波。
Equilibrium Point(平衡点)
- 当状态最终滑到原点时,意味着误差
。这就是目标状态 (比如速度完全跟随指令)。
1.4 与 PID 控制的区别
我们可见,PID 控制和非常相似,都有累加积分误差然后输出。
其最大的区别是滑模控制是非线性控制,而 PID 线性控制。其次的区别是,滑模控制的控制律依赖等效控制这个变量,而 PID 在任何地方也不依赖等效控制。
1.4.1 线性控制与非线性控制
对于 PID 和滑模控制来说,线性和非线性的区别是对于输出的区别:
其中比例项、积分项、微分项均有线性依赖关系。
我们再看滑模控制的控制律:
其在 函数的作用下产生跳变:当
输出
,当
输出
所以这里的
是典型非线性函数。
二、滑模观测器基本概念
2.1 什么是观测器
观测器观测的是传感器无法测量的变量。顾名思义是为了观测某个变量,但是这个变量我又没有传感器可以直接测量,比如经典的一个例子:
火箭发动机的温度,温度非常高,不可能有传感器直接测量的,那么这时候就要用观测器,我虽然不能直接测火箭发动机温度,但是我可以测量火箭表面温度,然后通过热传导公式计算出发动机温度。
假设火箭温度关系满足下列公式:
= 火箭表面温度
= 燃料量
= 不定系数
= 不定系数
= 发动机温度
其中 是燃料量,
、
是不确定系数。
实际测得的表面温度 与模型计算得到的温度
一般不相等。为此,我们设计一个状态观测器,使
逐渐逼近
,并在这个过程中动态修正系数
、
从而实时估计发动机温度。
2.2 滑膜观测器基本概念
滑模观测器 (Sliding Mode Observer,SMO)是一种用于系统状态估计的非线性观测器,尤其常用于电机控制 (如无传感器控制的永磁同步电机 PMSM) 来估计难以直接测量的量,比如转子位置、速度或反电动势。
滑模观测器是一类基于滑模控制思想的观测器,滑模观测器也包括滑模控制最核心的滑模面和控制律思想。
三、应用观测电机角度的滑模观测器
3.1 反电动势与角度的关系
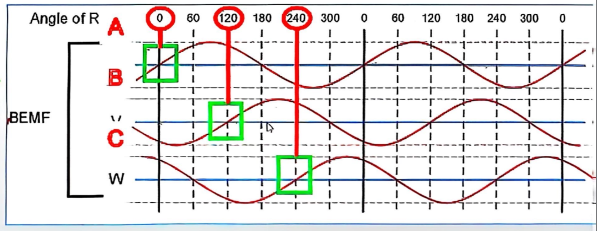
由于电机三相角度相差为 120° ,A 相的反电动势,相位差为0°;B 相则是120°;C 相是240°
也就是三项反电动势公式为:
下图则是三项反电动势和角度的关系。可见,我们只要能准确的获得当前电机的反电动势,即可计算器的当前角度。
3.2 静态电压方程
3.2.1 A、B、C 三相电压方程
这是一个三相无刷电机(或者同步电机)的 等效电路模型,是相电路(单相绕组)建模之后,再按三相星形(Y 形)连接表示出来的。
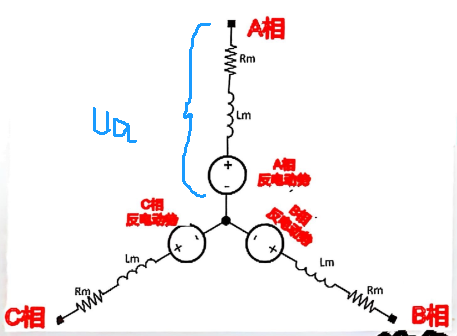
我们将 A 相单独列出来,如下图:
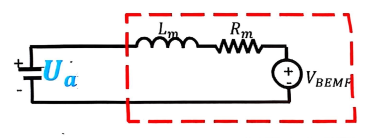
可见,对电压有阻碍作用的有:
= 相电阻(绕组电阻)
= 相电感(绕组电感)
:反电动势源,用来表示转子旋转时感应出来的电压。
整理公式可得:
= 三相绕组的端电压 (A、B、C)。这是逆变器通过 PWM 作用在定子绕组上的电压
= 三相绕组的电流 (A、B、C)
= 三相电流对时间的导数,对应绕组电感电压降。
= 三相反电动势 (Back-EMF),由转子磁场切割定子绕组磁链产生。它们与转速、转子位置及磁链相关。
3.2.1 α、β 轴电压方程
在 α、β 轴的电压方程和三项电压方程一样:
= 三相绕组的端电压 (α、β)。这是逆变器通过 PWM 作用在定子绕组上的电压
= 三相绕组的电流 (α、β)
= 三相电流对时间的导数,对应绕组电感电压降。
= 三相反电动势 (Back-EMF),由转子磁场切割定子绕组磁链产生。它们与转速、转子位置及磁链相关。
将其变形的可得:

= 定子在
静止坐标系下的电压分量
= 定子在
= 定子电流在
旋转坐标系下的分量 (d 轴、q 轴)
=
= 定子电阻
= 由永磁体产生的磁链 (主磁链)
= 转子电角度 (电角位置,dq 坐标旋转角度)
= 电角速度
我们来一步一步分析这个公式:
定子电阻压降:
电感和交叉耦合项:
加号前是电感的压降;加号后是由于电机是转子坐标变化,d、q 轴电感不相等时 (凸极电机),会出现耦合效应:
如果是 d、q 相等的表贴式电机则只有加号前的部分:
转子磁链相关项:
由永磁体产生的反电动势导致的压降,这个我们在下面的公式直接写成
= α、β 轴的反电动势
3.2.2 α、β 轴电压方程改成写电流微分形式
3.3 反电动势的滑模观测器
反电动势的滑模观测器核心思想是,根据电流和预估电流的误差预估一个反电动势 ,然后带入电流微分公式,得到预估电流。循环这个过程,我们便得到了 α、β 轴的反电动势。
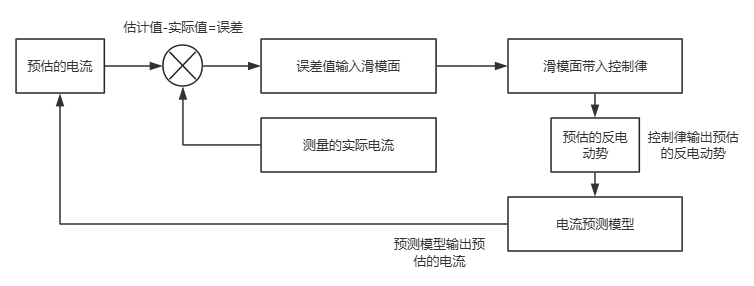
3.3.1 构造反电动势的滑模观测面
= 电流估计误差
= 电流估计值
此时,在 意味着我们观测的反电动势是正确的。
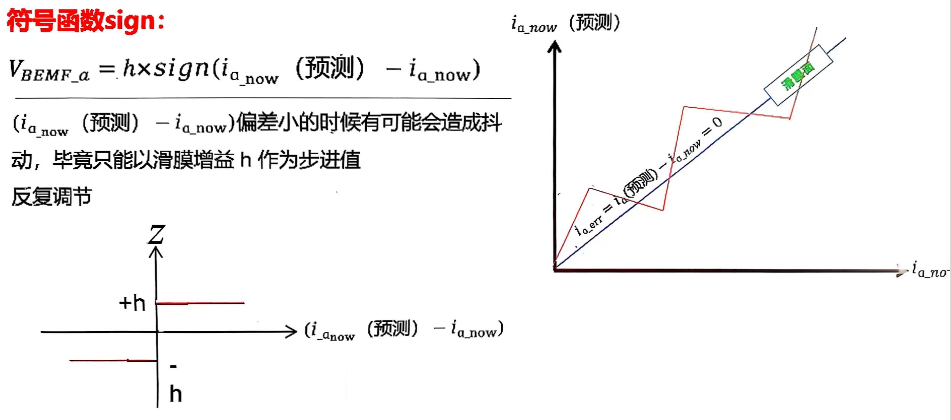
3.3.2 构造反电动势的控制律
其中 函数定义如下:
此时我们便得到了预估的 α 和 β 轴的反电动势。
其效果是这样的,那条 45° 直线是滑模面。横轴是误差,纵轴是误差的导数。
在理想的情况下,也就是滑模面,也就是误差和误差回正导数正线性比例。
3.3.3 电流微分公式 (电流预估模型)
= 估计的反电动势
3.3.3 代码演示
void SMO_position_estimate(void) {
// Clarke 变换:三相电流 -> αβ
float Ialpha = CS_M0.current_a;
float Ibeta = _1_SQRT3 * CS_M0.current_a + _2_SQRT3 * CS_M0.current_b;
// 根据电流微分方程构造电流预测模型
// 核心思想是输入预估的反电动势反推出来电流
//其中 SMO_Ualpha 和 SMO_Ubeta 是逆变器控制的电压 Ealpha 和 Ebeta 是滑模观测器估计的反电动势
Est_Ialpha = a_coeff * Est_Ialpha + b_coeff * (SMO_Ualpha - Ealpha);
Est_Ibeta = a_coeff * Est_Ibeta + b_coeff * (SMO_Ubeta - Ebeta);
// 电流误差 观测误差与实际误差 也就是滑模面函数
float Ialpha_Err = Est_Ialpha - Ialpha;
float Ibeta_Err = Est_Ibeta - Ibeta;
// 构造控制律
Ealpha = h * sat(Ialpha_Err, 0.5f);
Ebeta = h * sat(Ibeta_Err, 0.5f);
// 低通滤波
Ealpha_flt = 0.1f * Ealpha_flt + 0.9f * Ealpha;
Ebeta_flt = 0.1f * Ebeta_flt + 0.9f * Ebeta;
// 反电动势求角度 使用 atan2 函数计算电角度
SMO_Est_theta = -atan2f(Ealpha_flt, Ebeta_flt);
}
set 函数定义:
float sat(float err, float limits) {
if (err > limits) return 1;
else if (err < -limits) return -1;
else
return err / limits;
}
3.4 通过 α 和 β 轴反电动势计算角度
因为 α 轴和 β 轴呈 90°,所以使用反正切角度即可推算出电角度。
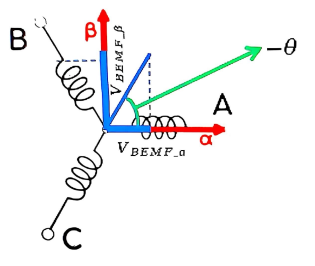
也就是:
对应上面代码的:
// 反电动势求角度 使用 atan2 函数计算电角度
SMO_Est_theta = -atan2f(Ealpha_flt, Ebeta_flt);


















 856
856

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









