



基于无人机的无线电力传输定位系统的实验分析
1 引言
无线传感器网络因其能够长期以高频率测量多种环境变量,被广泛应用于大规模陆地栖息地监测 [1] 到地下 [2] 和水下 [3] 系统。在时间段内,科学正在显著进步,然而尽管节能传感器网络和电池技术取得了进展,这些传感器网络的供电仍然是一个挑战。当前部署用于长时间运行的系统要么需要附加基础设施(例如电源线或太阳能板),要么需要定期维护以更换电池。我们开发了一种新颖的解决方案,即使用配备谐振磁无线电力传输系统的无人机为难以接近位置的传感器充电 [4]。该系统在近距离可传输超过10瓦特的功率,作用距离约为1米。该系统能够为嵌入材料中或难以接近位置的传感器充电,而在这些地方使用物理充电连接器是不切实际的。
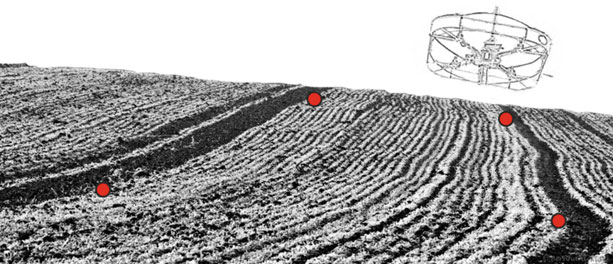
本文中,我们解决了如何使无人机接近地面传感器以实现充电的问题。为此,我们开发了一种基于感知无线能量传输系统产生的磁场以及光流相机的相对定位系统。我们采用基于磁场模型和相对位置实证测量估计的加权最小二乘法最小化方法。由于无人机导航所用全球定位系统的定位误差过大,无法支持高效充电,因此精确的相对定位至关重要。此外,我们希望避免在无人机上增加额外硬件,因为附加的有效载荷会减少飞行时间(例如添加激光扫描仪执行同步定位与地图构建)。我们开发的定位系统所需额外硬件极少,实验结果表明,该系统的平均定位误差为21厘米,可实现平均4.2瓦特的能量传输速率。此外,我们通过实验研究并证明了磁场感知不受泥土、木屑、石头和塑料等常见非磁性材料的影响。这意味着传感器可以被嵌入田地 中用于监测作物(如图1所示),仍可被定位和充电。
2 相关工作
有多种技术可用于无线传输能量,从定向微波能量 [5] 到射频能量收集 [6]。我们采用磁共振无线方式从无人机向负载传输功率。该技术与一百多年前特斯拉开发的系统相关 [7],最近的研究表明,可以在中等距离(几米)上传输数十瓦的功率。例如,库尔斯等人实现了在2米距离上传输60瓦功率,效率达到60%,用于点亮灯泡 [8]。杜ong和李 [9] 采用变耦合技术以提高不同距离下的电力传输效率,而萨姆普尔和迈耶 [10] 通过开发一种算法,在系统过耦合期间自动调节驱动频率,显著降低了无线电力传输中的效率损耗。
我们的研究重点并非提升谐振式无线电力传输系统的效率,而是获取携带能量传输系统的无人机与待充电传感器节点之间的精确定位。我们还研究了将所定位和充电的传感器嵌入不同材料时的影响。此前,徐等人研究了软木木材、混凝土砖和带绝缘的石膏板等建筑材料对无线能量传输的影响 [11]。我们在其基础上进一步研究了常见户外材料,并重点关注这些材料对我们的磁共振定位传感器的影响。
我们的工作受到穆尔和特德雷克的启发 [12],他们利用磁场使滑翔无人机定位并停靠在输电线上。他们使用标准磁力计来感知来自低频高电流输电线(40安培)的磁场。他们采用卡尔曼滤波器跟踪磁场,并消除磁场传感器中的位置模糊性。他们得出结论:他们的定位方法足以让小型无人机停靠在输电线上,但其系统并未实现基于传感器读数的完全闭环控制。我们的工作在多个方面与他们不同。首先,我们的系统工作在更高频率和更低电流下,因此标准磁力计无法工作。我们开发了一种传感器,通过测量小型谐振线圈中的电压来实现检测(见第4.2节)。其次,我们主要关注最终位置能够接近到足以实现功率传输,而对接近过程中的轨迹关注度较低,而轨迹对于实现停靠至关重要。因此,我们无需考虑飞行器动力学的细节,这使得我们的方法可以轻松适配新型飞行器。最后,我们验证了该系统并实现了完整的闭环控制。
与我们的工作相关的还有基于无线电传输的定位方法。例如,托凯卡尔等人使用方位角和信号强度来定位由机器人船 [13] 携带的无线电标记鱼。他们使用多个配备可旋转天线的无线传感器网络(WSN)节点来定位鱼。首先,他们通过真实值测量建立信号强度与距离之间的关系,并对该数据拟合一个线性回归模型。当信号强度达到最大值时,方位角和信号强度信息被发送到中央计算机。然后通过方位角构建一个封闭多边形,对鱼的位置进行三角测量。
最后,尽管我们是首批演示从空中机器人向地面传感器充电的团队之一,但早在1964年就已研究过反向问题,即如何为飞行器无线供电以驱动飞行中的直升机 [14],并在2011年实现了长达12小时、创纪录的四旋翼飞行 [15]。
3 电力传输设计考虑因素
在本节中,我们将介绍无线磁共振电力传输的背景信息,并讨论基于无人机的电力传输系统的设计考虑。感应式电力传输涉及至少两个近距离的线圈,它们共享交变磁场。发射线圈中的交流电(AC)产生磁场,进而在接收线圈中感应出交流电压,可用于为设备供电或充电。标准感应式电力传输仅在短距离内具有较高的效率,但通过使用强耦合磁共振可以克服这一限制。
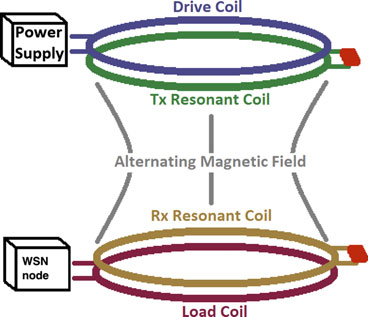
通过在驱动线圈和负载感应线圈之间加入两个耦合谐振线圈,中等距离的电力传输效率大大提高,如图2所示。在这种配置中,初级感应线圈(即驱动线圈)由交流电源驱动。由于驱动线圈与第一个谐振线圈(称为发射端谐振线圈)之间的近距离关系,产生振荡,能量被传输到Tx线圈。Tx线圈使Rx线圈以与其耦合成比例的能量发生振荡。Tx和Rx线圈上没有直接连接任何负载,以免干扰共振。这使得它们能够在比不使用谐振线圈时更大的距离上实现耦合和共振。最后一个线圈即负载线圈,以相同的方式从Rx线圈接收感应功率。
影响谐振式无线电力传输性能的两个主要因素是线圈的品质因数(Q)以及确保所有线圈在自然状态下以相近的频率谐振。品质因数表示谐振线圈在无热量损耗的情况下储存能量的能力,其定义为 [16]:
$$
Q = \frac{1}{R} \sqrt{\frac{L}{C}}
$$
其中 $ R $ 为线圈的电阻(Ω),$ L $ 为线圈的电感(H),$ C $ 为电容(F)。有关这些参数的计算方法详见 [17]。
直观上,品质因数可以理解为谐振系统所储存的能量与单个周期内损失能量的比值。然而,如前所述,在尽量减少线圈内部损耗时,虽然最大化品质因数很重要,但过高的Q值可能会产生不利影响。实际上,由于制造缺陷和元件公差,所有线圈的谐振频率会彼此略有不同。高Q值会导致谐振线圈的带宽降低,$ \Delta f $(单位为赫兹),其定义为:$ \Delta f = \frac{f_r}{Q} $。
如果一个线圈的谐振频率不在另一个线圈的带宽范围内,则它们的耦合效果会很差,如图3所示。该图表示两组谐振线圈。实线蓝色曲线代表谐振频率分别为 $ f_1 $ 和 $ f_2 $ 的线圈,且具有较高的Q值。在y轴上的曲线交点越高,电力传输功率越高。注意,高Q值意味着当两者对齐时峰值功率传输更高,但由于线圈固有谐振频率的差异(例如制造公差),它们仅能实现约一半的最佳性能。红色虚线曲线表示在相同频率 $ f_1 $ 和 $ f_2 $ 处谐振但Q值较低的线圈。如果它们精确对齐,整体传输效率会较低,但由于它们具有更高的带宽,因此在这种配置下更能容忍错位,从而实现更高的功率传输。虽然地面固定电力传输系统可以进行精确调谐,但对于基于无人机的系统或其他野外机器人应用来说,这可能较为困难。例如,为了减轻重量,我们的线圈在飞行过程中会发生显著弯曲,并且在粗暴着陆或碰撞后形状变形,导致其谐振频率发生变化。因此,尽管高Q值通常是理想的,但过高的Q值可能会降低许多机器人系统的性能。

在设计谐振式无线电力传输系统时,还有许多其他需要考虑的因素。对于低频系统,能量损耗主要由欧姆损耗主导,而高频损耗则主要由辐射损耗主导 [18]。我们这个相对低频系统的首要损耗是欧姆损耗,当大电流通过每个线圈中具有轻微电阻性的绕组时,会导致线圈发热。此外,我们的交流电源系统中还存在开关损耗。通过降低电阻,我们可以提高品质因数Q并减少前述损耗。然而,这可能会导致通过MOSFET的大电流增加,从而加剧开关损耗。此外,虽然使用更粗的导线是降低电阻和提高品质因数Q的一种简便方法,但也会增加无人机的重量。在调整系统中的电容和电感以试图最大化品质因数时,也必须做出类似的权衡。
在简要探讨了磁共振无线电力传输的理论并讨论了设计考虑之后,我们将继续研究基于无人机的无线能量传输系统和无线传感器网络节点的具体组件。
4 系统组成
本节描述了无人机无线能量传输系统的硬件。图4展示了无人机上无线能量传输系统的概览。该系统由无人机、无人机上的无线能量发射器以及接收无线传感器节点组成。
4.1 无人机电力传输系统
图4展示了无线能量传输系统的概览。在无人机上,发射驱动板将交流电流发送至驱动线圈,从而产生交变磁场,以激励邻近的发射端谐振线圈。发射端谐振线圈用于聚焦磁场,以便向接收谐振线圈进行电力传输,接收谐振线圈与负载线圈一同安装在无线传感器网络节点上。磁谐振(MR)传感器连接到接收谐振线圈,用于检测发射系统并实现定位。负载线圈连接至接收电路板,由其获取能量。
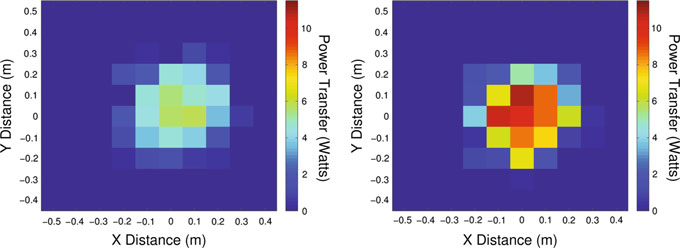
表1 无人机和无线传感器网络节点线圈的能量传输系统参数
| 描述 | 变量 | 值 |
|---|---|---|
| 线圈长度 | l | 1.47655 m |
| 线圈半径 | r | 0.235 m |
| 电阻 | R | 0.0143 Ω |
| 匝数 | N | 2 |
| 电感 | L | 5.20068 × 10⁻⁶ Ω |
| 电容 | C | 1.5 × 10⁻⁷ F |
| 频率 | f_r | 167 kHz |
| 束厚 | c | 0.004 米 |
| 品质因数 | Q | 411 |
来自接收谐振线圈。最后,负载线圈中的能量可以存储在无线传感器网络节点中。表1给出了我们在无线能量传输系统中所使用的线圈的具体参数概述。
发射驱动板的核心是AD9833可编程波形发生器,能够产生高达12.5兆赫的信号。该信号输入至H桥,从而产生大功率交流电流,并通过驱动线圈进行传输。通常我们使用9–24伏的输入电压范围,电流在1–4安培之间,尽管该电路板设计支持最高45伏和8安培,最大功率可达100瓦。此外,发射板配备有处理器,用于控制频率、启用或禁用电力传输、监测电压和电流,并通过Zigbee无线电与地面传感器和基站通信。
图5 显示了在输入电压为12V和24V时,连接至负载线圈的设备可接收到的功率大小。该图表明,在距离发射器约30厘米半径范围内,当输入电压为12V(即我们无人机的工作电压)时,电力传输功率可超过3W。随着发射器与接收器之间距离的增加,超过此半径后,传输的功率会显著下降。在第5节中,我们证明无人机能够持续将位置定位在距离传感器21厘米以内。对于我们的应用而言,在30厘米范围内实现3W的功率已足够,因为单次飞行即可为AAA电池充电,从而让无线传感器网络节点运行数周或数月。虽然我们并不特别关注优化电力传输系统,但值得注意的是,整体电力传输能力可以轻松提升。图5(右)显示,通过使输入电压翻倍,我们可以使传输功率翻倍,获得超过10W的功率。这可以通过在无人机上附加额外电池组或使用具有更高工作电压的无人机来实现。
4.2 无线功率接收传感器节点
无线传感器网络(WSN)中的一个节点由无线功率接收板、线圈、磁谐振传感器以及针对该节点应用的其他特定传感器组成,例如振动、温度、土壤湿度或压力传感器。本文省略了任何特定应用传感系统,而是专注于能量传输系统,并利用无线能量传输系统将无人机定位到无线传感器网络节点上。
一个无线传感器网络节点在峰值效率下可接收约6.1瓦特的功率。通过5分钟6.1瓦特的电力传输,几乎可以充满一节典型的镍镉可充电AAA电池,该电池可支持大多数类型的低功耗传感系统运行数周。与发射器类似,在负载线圈附近有一个接收谐振线圈。接收板从负载线圈中获取能量,既可以直接受电使用,也可以为电池或超级电容器充电。
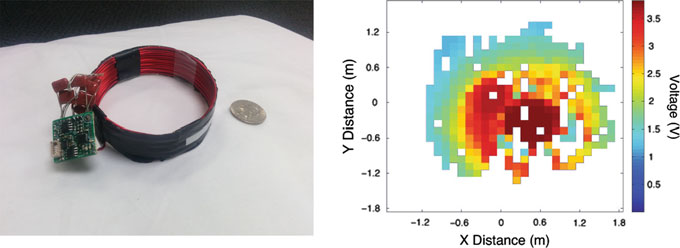
一种磁谐振(MR)传感器,如图6(左)所示,连接至接收谐振线圈,可检测无人机电力传输系统的存在。当发射系统靠近时,该谐振线圈中的电压显著增加,并且由MR传感器测量。使用MR传感器的优势在于,它能够从比接收端负载板远三倍的距离检测到能量传输系统,因此成为定位算法的主要输入。磁共振传感器电路包含两个运算放大器。第一个用于控制增益,第二个配置为精密整流器,将交流信号转换为直流值,然后由带有10位模数转换器(ADC)的微控制器读取。图6(右)展示了来自MR传感器的数据。当发射器接近MR传感器时,电压值趋近于约3.7V的最大值;当MR传感器与发射器之间的距离增加时,电压值趋近于约1伏的最小值。
4.3 通过不同材料的MR传感
我们设想由无人机为无线传感器网络节点充电时,这些节点可能嵌入在多种不同材料中,例如埋于地下以监测土壤特性。在无人机对传感器完成定位后,可以降落在节点上以最大化充电效率(消除悬停所需的能量)。在本节中,我们测试了常见户外材料对MR传感器的影响。
图7 比较了将谐振线圈嵌入塑料、木材、石头、土壤和钢中时的电压,与在空气中作为基准测量的结果。横坐标为水平距离,相对于MR传感器呈圆周对称。纵坐标上的电压用于定位,并且与无线传感器网络节点接收到的电力传输功率直接相关。x轴是水平距离,相对于MR传感器呈圆周对称。纵坐标上的电压用于定位,并且与y轴上的电压用于定位,并且与无线传感器网络节点接收到的电力传输功率直接相关。
在本实验中,无线传感器网络节点被放置在每种目标材料下方至少15厘米处(钢除外,其上仅覆盖一块1毫米板材)。无人机以恒定速度沿一条水平直线直接飞越无线传感器网络节点上方,高度为1米,并记录MR传感器的值。如图7所示,非铁磁性材料对接收没有影响,但钢会干扰接收,其他金属也是如此。这意味着传感器可以嵌入许多常见材料中以实现长期部署。
5 定位
在第4节中,我们探讨了附着在无人机和无线传感器网络节点上的磁共振电力传输系统的细节。我们证明了该系统能够传输足够的功率,为低功耗的无线传感器网络节点充电。在本节中,我们解决无人机如何接近无线传感器网络节点以实现电力传输的问题。全球定位系统可以在部署时记录无线传感器网络节点的位置,但其在95%置信区间内的误差可达7.8米 [19]。
由于无人机必须在30厘米范围内才能高效传输电力,因此在本章中,我们开发了一种定位算法,利用磁阻传感器感知的磁场信息来对无线传感器网络节点进行定位。需要注意的是,磁场强度信息由位于无线传感器网络节点处的MR传感器测量。当MR传感器首次检测到电力传输时,它会开启无线电,并通过短距离无线电向无人机广播距离信息,从而在无人机未给节点充电时消耗较少能量。除了使用MR传感器的信息外,我们还利用无人机上的光流传感器信息以提供更好的航位推算能力。使用光流相机实现无人机的位置与控制意味着需要在无人机上增加硬件,但无线传感器网络节点可以显著缩小体积。在本节所述实验中,我们通过使用带有0.2米/秒高斯噪声的动作捕捉系统来模拟光流相机,该噪声值即霍内格等人 [20] 所研发的光流系统的速度误差。
5.1 定位
为了估计无人机的位置,我们必须将MR传感器接收到的电压信息映射到空间中的一个位置。首先,我们可以根据无人机的位置,通过下式所示的方程得到磁场强度的估计值:[12]:
$$
\bar{B}
i = \frac{\mu_0 N I_i a}{4\pi \hat{r}_i^3} [2\cos(\theta
{\hat{i}})\hat{r}
i + \sin(\theta
{\hat{i}})\theta_{\hat{i}}]
$$
其中,$\bar{B}_i$ 是MR传感器测得的磁场强度,单位为特斯拉,$\mu_0$ 是自由空间的磁导率,$N$ 是线圈的匝数,$I_i$ 是时刻 $i$ 通过发射器的电流,$a$ 是线圈的面积,$\hat{r}$ 是无人机到传感器的估计径向距离,$\theta_i$ 是无人机到传感器的估计角度。
MR传感器根据周围磁场接收到的电压提供0到600之间的模数转换值读数。这些模数转换值 $\alpha$ 通过查找表函数 $\bar{B}$ 映射到磁场强度。该查找表是利用类似于图7的信息获得的,该信息将无人机与MR传感器的相对位置与MR传感器的读数关联起来。
现在,我们已经将传感器的模数转换值映射到磁场强度,可以利用MR传感器的距离读数为无人机开发定位算法。为了实现定位,我们必须同时获得磁场强度以及无人机的位置估计。然而,由于GPS误差过大,我们使用光流相机,它能够在短时间内提供比GPS更精确的运动估计 [21, 22]。
我们尝试在系统中使用的特定光流相机(PX4Flow [21])对其观测表面非常敏感。我们测试了多种表面,发现在有纹理的木制表面上进行10秒飞行时,最小误差为0.2米(与开发者报告的结果类似),但使用其他材料时结果很差。尽管最佳误差在可接受范围内,但我们无法获得足够的材料来覆盖整个测试区域。因此,我们通过在无人机的速度估计中引入十倍的噪声(0.2米/秒)来模拟光流相机。
MR传感器被直接放置在无线传感器网络节点的接收谐振线圈上。然后我们采用最小二乘法来寻找无线传感器网络节点的位置。具体方法是寻找一个位置 $(\hat{x}_s, \hat{y}_s)$,使得无人机的位置与MR传感器的测距值之间的差异最小化。具体而言,我们最小化以下函数:
$$
\arg \min_{\hat{x}
s, \hat{y}_s, \hat{z}_s} \sum
{i=1}^{n} \left( \frac{\mu_0 N I_i a}{4\pi \hat{r}
i^3} [2\cos(\theta
{\hat{i}})\hat{r}
i + \sin(\theta
{\hat{i}})\theta_{\hat{i}}] - \beta(\alpha_i) \right)^2
$$
其中 $\hat{r} i^2 = (\hat{x} {uav,i} - \hat{x} s)^2 + (\hat{y} {uav,i} - \hat{y} s)^2$,$(\hat{x} {uav,i}, \hat{y} {uav,i})$ 是通过仿真光流得到的无人机估计位置,$d_i$ 是距离测量值,对应于该无人机位置的MR传感器,且 $\hat{z}_s = \hat{z} {uav,i} - \hat{r} i \sin \theta {\hat{i}}$ 是传感器高度。
对数值进行平方意味着无人机越接近接收器,赋予该函数的权重就越高。这意味着高电压对于错误参数会更严重地惩罚函数值。
算法 1 定位算法
1: 过程 定位(xsc, ysc) // 在已知粗略位置情况下的主要定位方法
2: GPSFlyTo(xsc, ysc) // 飞至粗略位置
3: 切换到光流 + MR传感器 控制
4: OptFlowFlyCircle(半径 = 2)
5: OptFlowFlyTo(ˆxs, ˆys)
6: 结束过程
7: 过程 新MR读数时(Volts)
8: while True do // 持续优化估计值
9: d ← Volts_to_Range(Volts)
10: OptFlowFlyInCircle(半径 = d)
11: OptFlowFlyTo(ˆxs, ˆys)
12: 结束循环
13: 结束过程
14: 过程 新MR读数时(Volts)
15: d ← Volts_to_Range(Volts)
16: Xuav ← Append(Xuav, ˆxuav)
17: Yuav ← Append(Yuav, ˆyuav)
18: D ← Append(D, d)
19: ˆxs, ˆys ← ∑_{i=1}^{n} (μ₀N I_i a / 2) // Eqn. 3
20: 返回 ˆxs, ˆys // 传感器的估计位置
21: 结束过程
然后,我们找到使该函数在 $n$ 次读数上最小化的MR传感器的估计位置 $(\hat{x}_s, \hat{y}_s)$。输入到最小化函数中的数据采用循环队列结构,最多可存储10秒的数据。这种时间特性可防止最小化函数因采样密集区域而过度加权,避免因样本过少导致错误的位置估计,以及减轻长期光流位置估计漂移带来的问题。
最小化公式3可产生准确的位置估计,只要在MR传感器1米范围内有足够的采样点。算法1展示了我们用于确保对区域良好采样的算法。该定位算法首先仅使用GPS接近部署期间记录的传感器位置。当无人机到达传感器的粗略位置时,它将靠近传感器,但距离仍不足以向传感器传输功率。一旦MR传感器检测到非零读数,无人机将执行一个半径等于其接收范围估计值的圆形轨迹。完成圆形飞行后,无人机将飞往无线传感器网络节点的估计位置(第5行),该位置由单独的线程持续计算得出(第11至17行)。该过程以循环方式执行,以不断优化估计值(第6至8行),直到采取其他操作(例如降落、飞回基地、飞往另一个无线传感器网络节点)。
我们使用该方法进行了超过10次的定位试验。平均而言,无人机定位的平均误差为15厘米,标准差为6厘米,平均定位时间为46秒。图8(左)显示了无人机采用此方法定位传感器的路径。图8(右)显示了距离读数与真实值(通过动作捕捉系统获得)以及能量传输速率的对比。在时间 $t = 0$ 到 $t = 5$ 期间,尚未找到有效的距离估计值,因此没有估计距离。无人机继续执行预设飞行任务直到 $t = 15$,然后飞向传感器位置的当前估计点。在本次特定实验中,经过24秒后,定位位置距离真实位置在6厘米以内。在此距离下,无线传感器网络节点接收到5.49 W的功率,MR传感器达到其最大值的100%。
6 结论
本文提出的基于无人机的无线能量传输系统可实现对偏远地区传感器的自主充电。我们讨论了基于无人机的无线能量传输系统的设计考虑,并介绍了我们系统的具体细节。结果表明,多种常见的户外材料(木材、泥土、石头、土壤)对能量传输系统影响较小。我们提出了一种独特的定位策略,通过测量谐振式无线电力传输系统发出的磁场来实现定位。该定位策略使无人机能够以高于全球定位系统的精度对无线传感器网络节点进行定位。无人机能够平均在15厘米范围内精确定位并降落在无线传感器网络节点上,以平均4.2瓦特的功率对其进行充电。这表明,无人机能够为部署在偏远且难以接近区域的传感器进行充电。

















 1055
1055

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









