







在运动控制领域,路径规划(Path Planning)和轨迹规划(Trajectory Planning)是两个密切相关但又有所区别的概念。
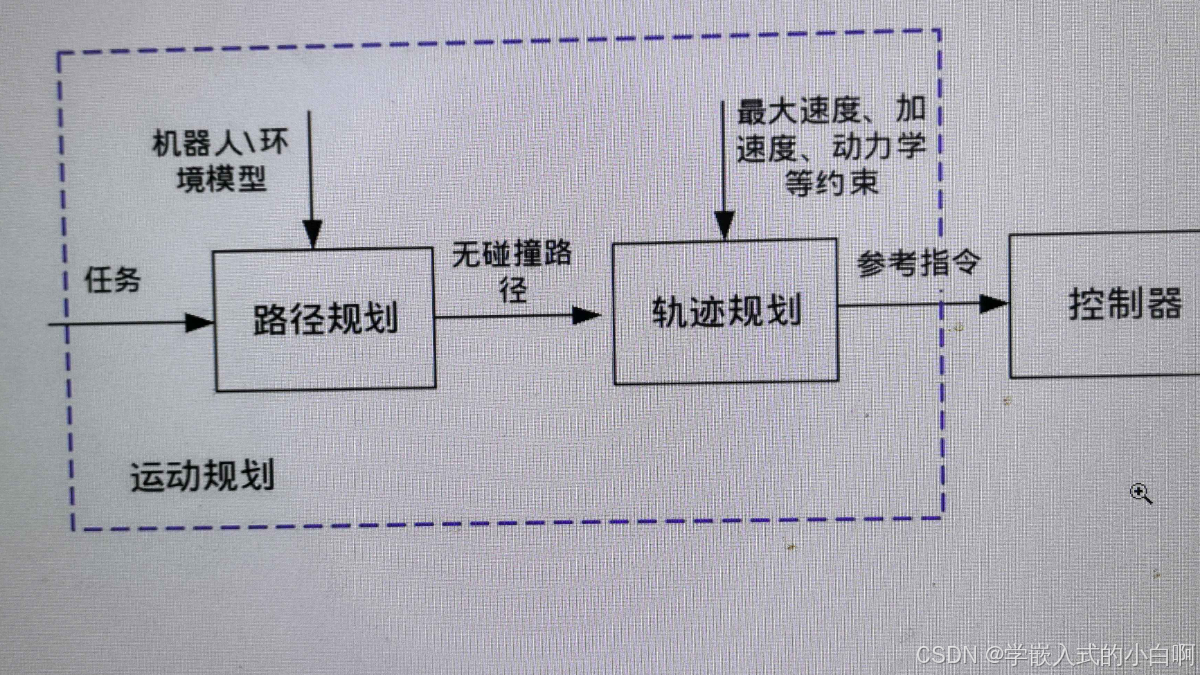
路径规划主要关注在二维或三维空间中,从起点到终点之间找到一条无碰撞的路径。这个过程通常不考虑时间因素,只考虑空间中的障碍物和目标位置。路径规划的结果是一系列的位置点,这些点定义了机器人或移动体应该通过的路径,但并不包含这些点之间的时间信息。路径规划的目标通常是找到一条既避开障碍物又尽可能短的路径,有时也考虑路径的平滑性和其他优化目标。
轨迹规划则是在路径规划的基础上,考虑时间因素,为机器人或移动体规划出一条完整的运动轨迹。这个轨迹不仅包括位置信息,还包括速度、加速度等动态信息。轨迹规划的目标是生成一条平滑的轨迹,使得机器人或移动体能够按照这条轨迹平稳、安全地移动,同时满足动力学和运动学约束。轨迹规划通常涉及到更复杂的计算,因为它需要考虑机器人的动态特性和实时响应。
两者的联系在于,轨迹规划通常是基于路径规划的结果来进行的。也就是说,轨迹规划使用路径规划得到的路径点作为基础,然后为这些点添加时间信息,形成一条完整的运动轨迹。在实际应用中,路径规划和轨迹规划往往是顺序进行的两个步骤,先进行路径规划确定移动的路径,再进行轨迹规划确定如何在这条路径上移动。
在自动驾驶、机器人导航等领域,这两个概念尤为重要。例如,在自动驾驶车辆中,路径规划可能首先确定车辆从起点到终点的最优路线,然后轨迹规划会计算车辆在这条路线上行驶的速度和加速度,以确保安全和舒适。路径跟踪和轨迹跟踪则是在路径规划和轨迹规划之后的实际执行阶段,分别确保车辆按照预定的路径和轨迹行驶。

















 2364
2364

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









