







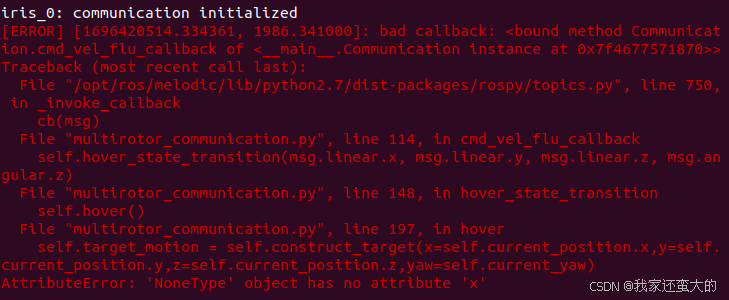
当xtdrone出现此类报错的时候可以检查一下无人机用的是视觉模式还是GPS模式,没有视觉传感器记得改回GPS模式,参考语雀官方文档PX4飞控EKF配置
然后记得把eeprom参数删除
rm ~/.ros/eeprom/parameters*
rm -rf ~/.ros/sitl*
当xtdrone出现此类报错的时候可以检查一下无人机用的是视觉模式还是GPS模式,没有视觉传感器记得改回GPS模式,参考语雀官方文档PX4飞控EKF配置
然后记得把eeprom参数删除
rm ~/.ros/eeprom/parameters*
rm -rf ~/.ros/sitl*
 482
482

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























