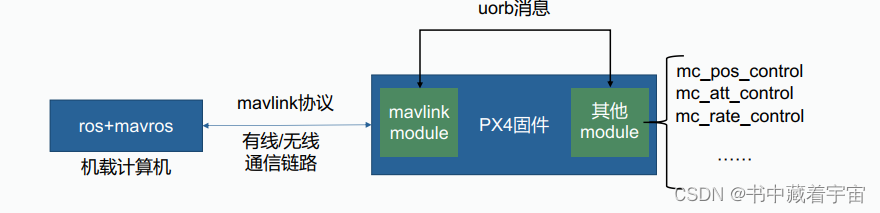
一,确定消息类型 无人机通过即在电脑是现自主飞行:思路如下。 通过Mavros功能包,将ROS消息转换为Mavlink消息。实现对无人机的控制。 几种消息之间的关系如下: 对于ROS数据,就是我们机载电脑执行ROS系统的数据。 对于Mavros消息,就是Mavros功能包内部的消息。查询网站 对于mavlink消息,就是无人机与外部通信的消息(格式)MavLink消息 对于uorb消息,就是无人机内部传感器之间的消息类型。uorb消息









 超级会员免费看
超级会员免费看

 本文档详细介绍了如何通过Mavros功能包实现在计算机上模拟无人机自主飞行。首先确定消息类型,包括ROS数据、Mavros消息、Mavlink消息和uORB消息。接着,确定话题功能,例如Mavros消息的例子。然后,概述具体实现流程,包括创建功能包、编写程序并修改配置文件。在实现过程中,强调了消息发送频率、无人机连接判断及数据传输的重要性。
本文档详细介绍了如何通过Mavros功能包实现在计算机上模拟无人机自主飞行。首先确定消息类型,包括ROS数据、Mavros消息、Mavlink消息和uORB消息。接着,确定话题功能,例如Mavros消息的例子。然后,概述具体实现流程,包括创建功能包、编写程序并修改配置文件。在实现过程中,强调了消息发送频率、无人机连接判断及数据传输的重要性。


 订阅专栏 解锁全文
订阅专栏 解锁全文



















 2378
2378

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








