




 该博客介绍了使用RGBD(RGB+深度图)进行室内场景分析的EfficientRGB-D语义分割网络。通过使用RealSense D455相机获取RGB和深度图,利用ROS接口预处理数据,包括Rescale、ToTensor和Normalize。虽然对于简单场景能获得清晰的轮廓分割,但在复杂或移动相机的情况下,效果可能不稳定,这可能与训练数据集(如Sun RGB-D)和参数调整有关。文章展示了这种方法在分割建图上的应用,并指出需要进一步优化。
该博客介绍了使用RGBD(RGB+深度图)进行室内场景分析的EfficientRGB-D语义分割网络。通过使用RealSense D455相机获取RGB和深度图,利用ROS接口预处理数据,包括Rescale、ToTensor和Normalize。虽然对于简单场景能获得清晰的轮廓分割,但在复杂或移动相机的情况下,效果可能不稳定,这可能与训练数据集(如Sun RGB-D)和参数调整有关。文章展示了这种方法在分割建图上的应用,并指出需要进一步优化。
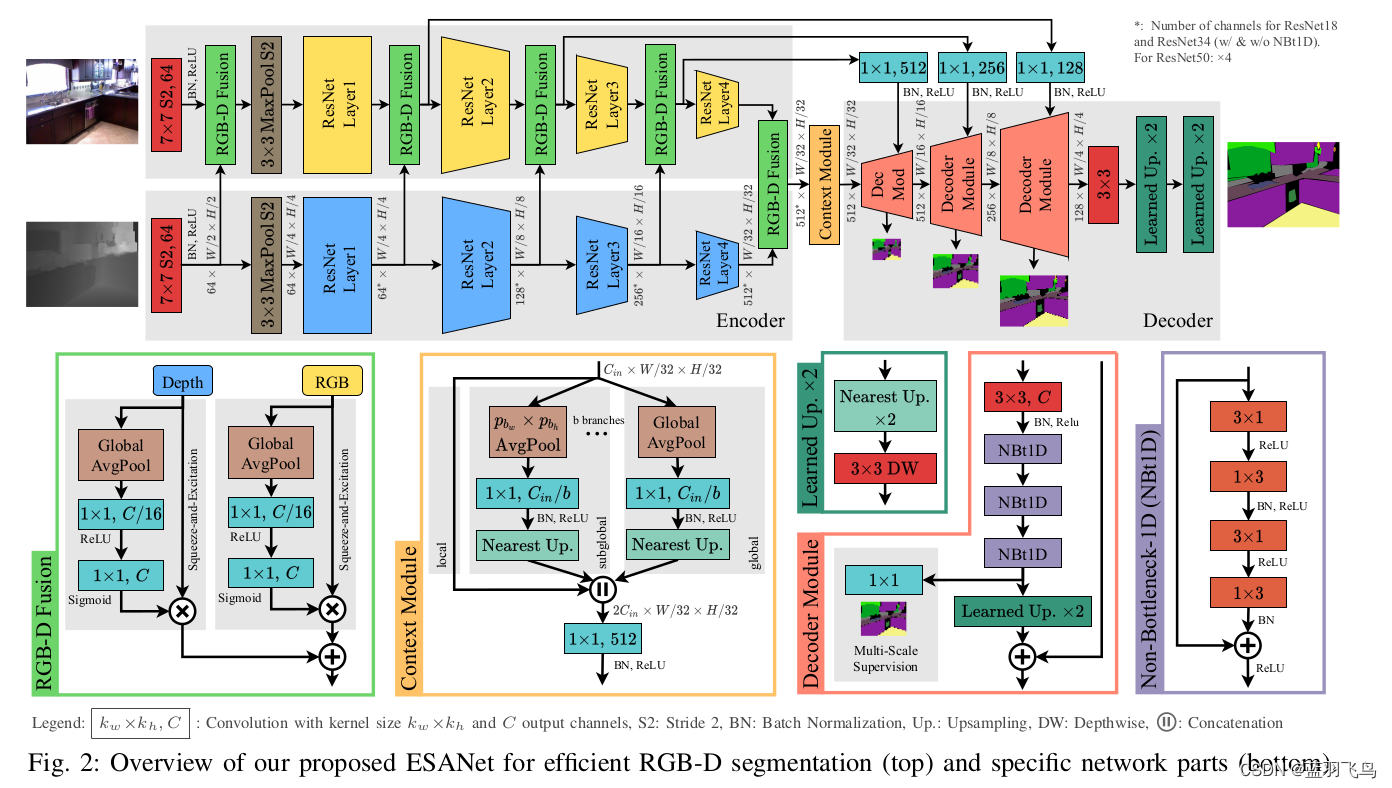
paper:Efficient RGB-D Semantic Segmentation for Indoor Scene Analysis
网络结构如下,相比于基于RGB图像的语义分割,该网络用了RGB与深度图结合。
既然是RGBD,就可以用RGBD相机来测试了,选择realsense d455相机。
用ROS接口读入RGB图像与深度图。
这里要注意图像需要经过预处理,通过ESANet的源码,得知在validate阶段需要做以下预处理。
transform_list = [Rescale(height=height, width=width)]
transform_list.extend([
ToTensor(),
Normalize(depth_mean=depth_mean,
depth_std=depth_std,
depth_mode=depth_mode)
] 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 5万+
5万+




 到【灌水乐园】发言
到【灌水乐园】发言









