




 本文介绍了使用RealSense D435相机的深度信息与OpenCV的grabcut算法结合,实现基于距离的图像分割。相比于传统的RGB相机,该方法能自动根据Z轴深度分割背景,但可能因鲁棒性问题导致分割效果不佳。
本文介绍了使用RealSense D435相机的深度信息与OpenCV的grabcut算法结合,实现基于距离的图像分割。相比于传统的RGB相机,该方法能自动根据Z轴深度分割背景,但可能因鲁棒性问题导致分割效果不佳。
这次演示的demo是基于OpenCV grabcut分割算法+深度信息去除背景。
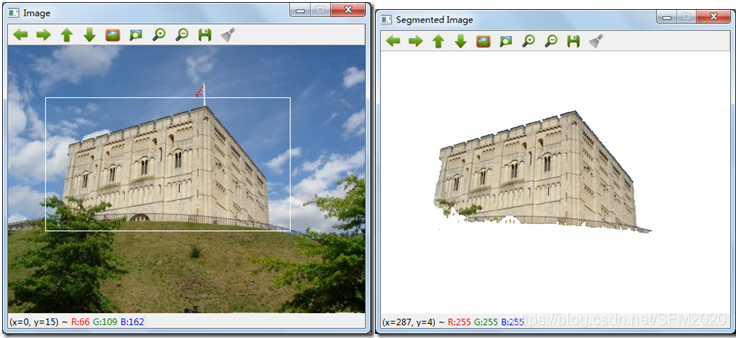
基于RGB相机的grabcut分割算法需要鼠标去框选指定的object,实现分割的目的,类似下图所示:
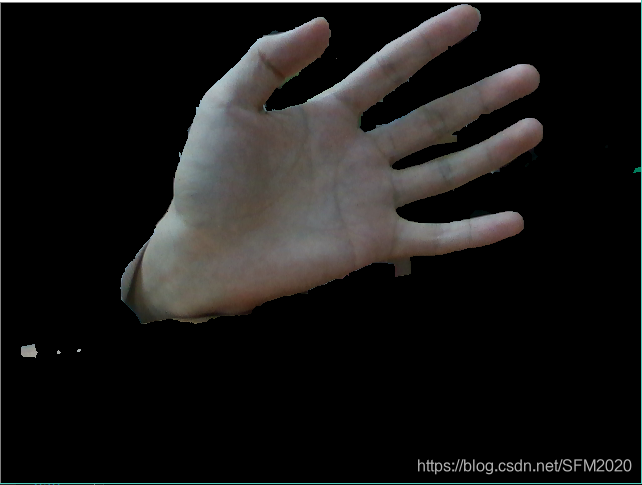
而下图是基于rgb-d相机的grabcut分割算法,它能够根据Z轴的深度信息,自动的分割背景,达到下图的效果,但是缺点在于鲁棒性很差,很难做到正确分割。。
这是源码:
// License: Apache 2.0. See LICENSE file in root directory.
// Copyright(c) 2017 Intel Corporation. All Rights Reserved.
#include <librealsense2/rs.hpp> // Include RealSense Cross Platform API
#include <opencv2/opencv.hpp> // Include OpenCV API
#include "../cv-helpers.hpp" // Helper functions for conversions between RealSense and OpenCV
int main(int argc, char * argv[]) try
{
using namespace cv;
using namespace rs2 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1595
1595





 到【灌水乐园】发言
到【灌水乐园】发言







