



abb机器人视觉引导抓取C#联合halcon联合RobotStudio实现虚拟仿真九点标定海康工业相机C#上位机视觉抓取 -本链接只出源码+工作站,不出任何硬件,工业相机请自备 -提供2个版本一个是有海康工业相机 和 无工业相机 1.有海康工业相机提供标定教程和咨询 2.没有海康工业相机的提供100张图片仿真和咨询 -本项目无需实体机器人一样能玩视觉引导非常适合新手学习 -使用的软件有 1.RobotStudio 6.08 Rapid编程,smart组件仿真 2.Visual Studio 2019 C#集成halcon代码+pc sdk二次开发 3.halcon视觉算法
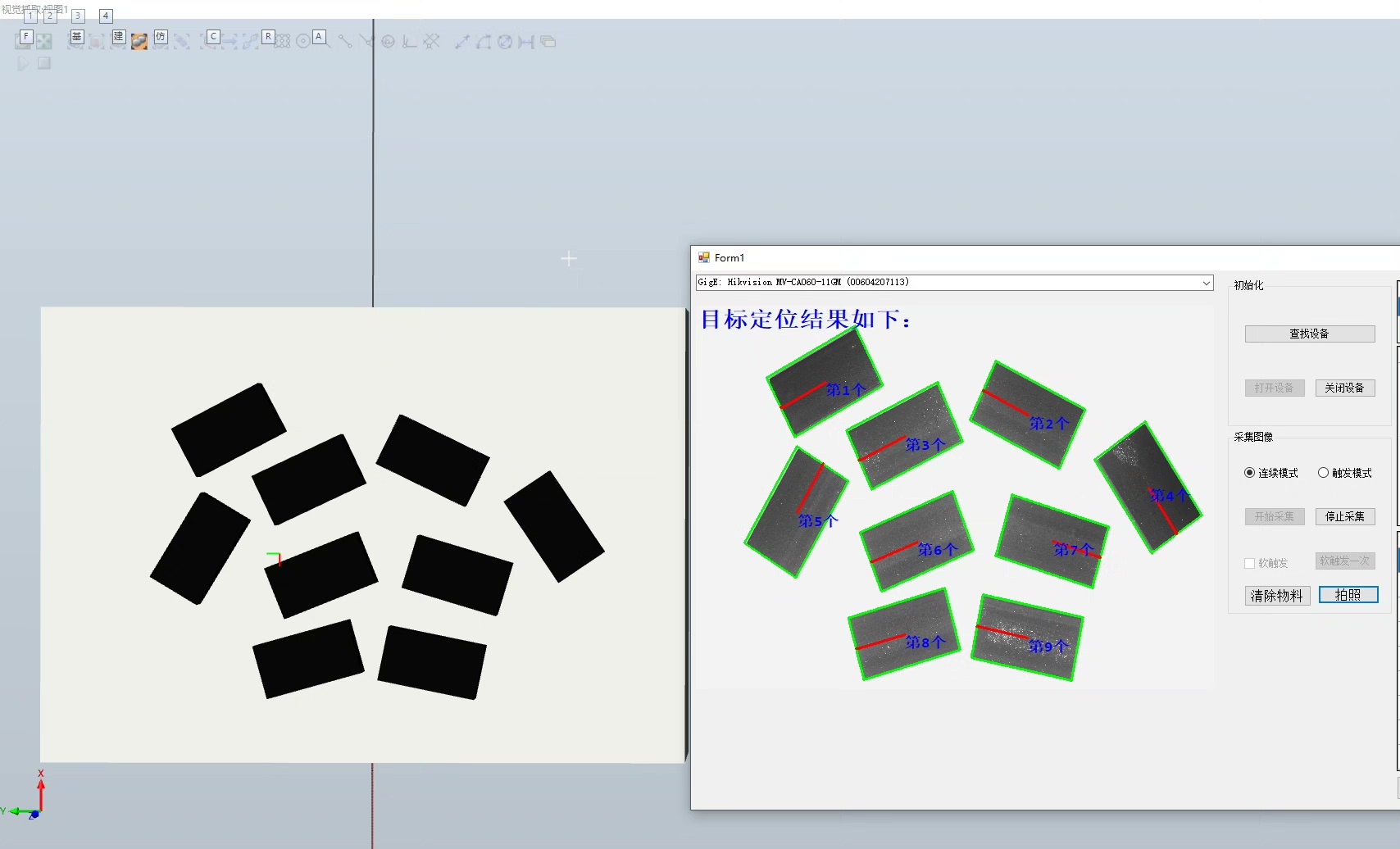
嘿,各位机器人与视觉技术爱好者们!今天来给大家分享一个超有趣的项目——利用C#、Halcon以及RobotStudio实现ABB机器人视觉引导抓取,还涵盖了九点标定,以及海康工业相机的相关应用哦。
先跟大家说明下,本项目链接只提供源码和工作站,硬件方面的工业相机就得各位自己准备啦。不过别担心,这里提供了两个版本,无论你有没有海康工业相机,都能愉快玩耍。要是有相机,我们提供标定教程和咨询服务;要是没有,也会提供100张图片用于仿真,同样有咨询支持。而且呀,这个项目就算没有实体机器人,也能体验视觉引导的乐趣,超适合新手学习上手。
所用软件介绍
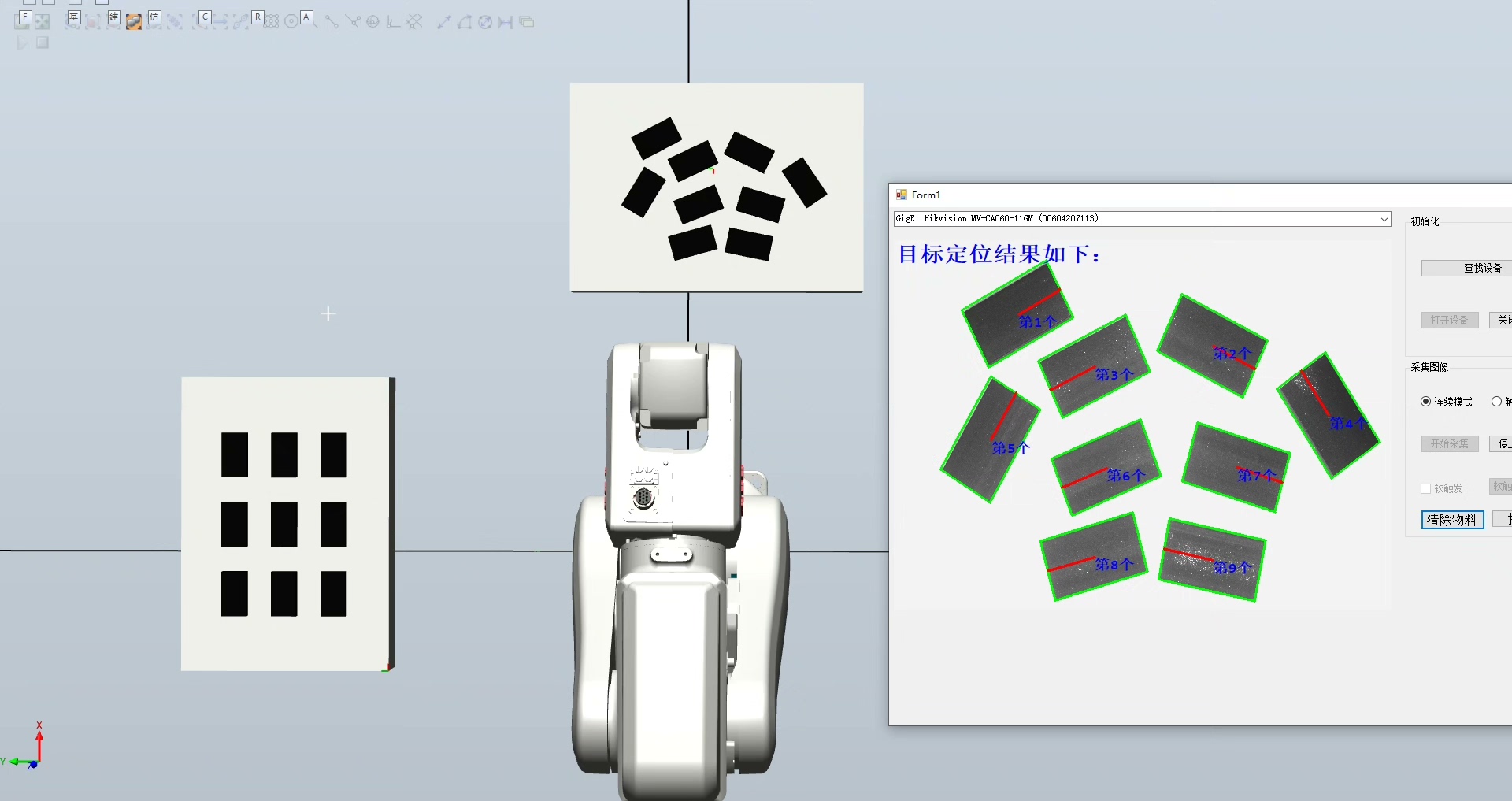
- RobotStudio 6.08:这可是ABB机器人仿真与编程的利器,通过Rapid编程和smart组件来完成整个仿真过程。想象一下,在虚拟环境里就能模拟机器人实际工作场景,提前测试各种方案,避免了实际操作中的不少麻烦。
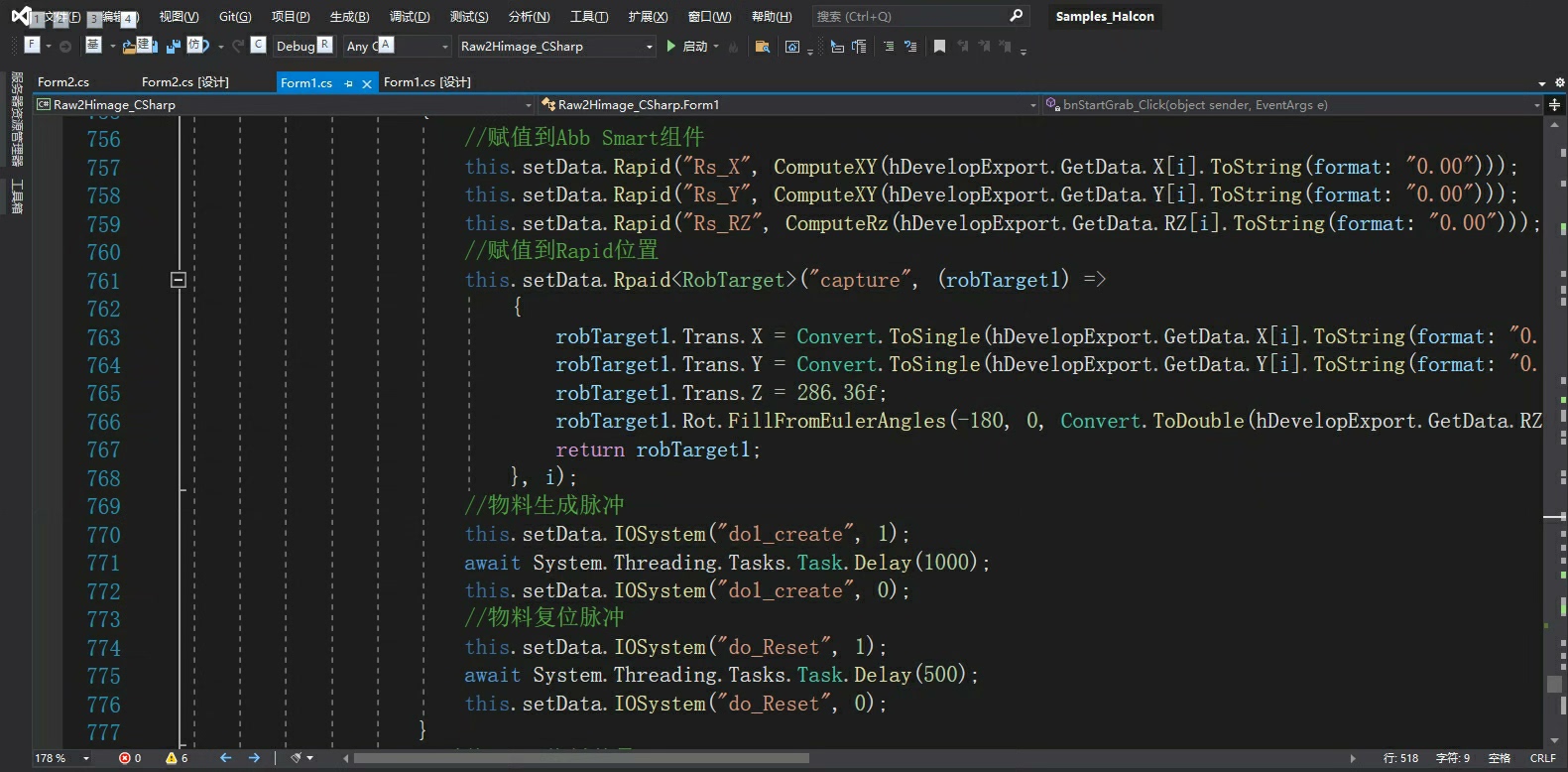
- Visual Studio 2019:作为C#开发的强大平台,在这里我们集成Halcon代码,还会利用PC SDK进行二次开发。C#语言简洁高效,与Halcon结合能快速实现各种视觉算法的逻辑控制。
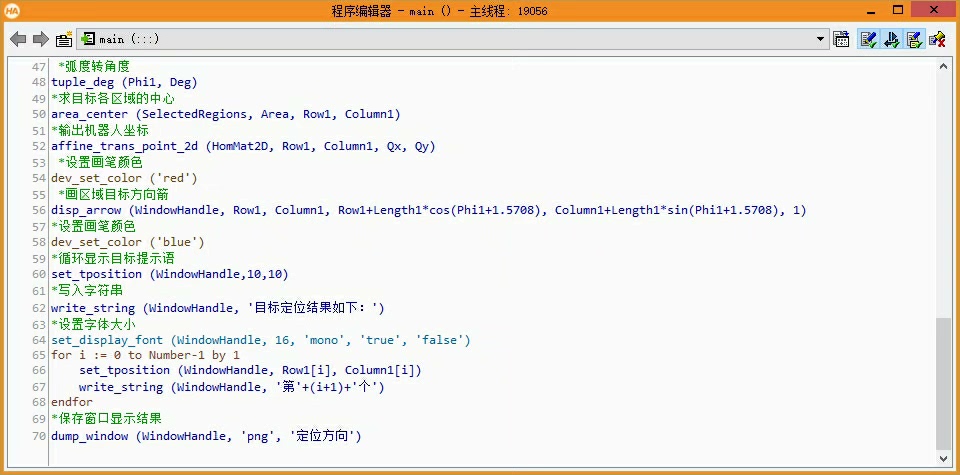
- Halcon视觉算法:图像处理和机器视觉领域的佼佼者,各种强大的算法能帮我们从图像中提取关键信息,为机器人的抓取动作提供准确引导。
代码示例与分析
咱们以C#集成Halcon代码为例,先来看一段简单的初始化Halcon环境的代码:
using HalconDotNet;
class VisionProcessor
{
private HObject image;
private HOperatorSet halcon;
public VisionProcessor()
{
halcon = new HOperatorSet();
}
public void LoadImage(string path)
{
halcon.ReadImage(out image, path);
}
}在这段代码里,首先引入了HalconDotNet命名空间,这是与Halcon交互的基础。然后定义了一个VisionProcessor类,里面声明了用于存储图像的HObject类型变量image,以及HOperatorSet类型的halcon,它就像是我们操作Halcon算法的“钥匙”。构造函数VisionProcessor里初始化了halcon对象。而LoadImage方法则是利用halcon.ReadImage函数从指定路径读取图像到image变量中,为后续的图像处理做准备。
再比如在进行九点标定时,可能会用到类似这样的代码(简化示意):
public void CalibrateNinePoints()
{
// 假设已经获取到九个点在图像中的坐标
HTuple rowPoints = new HTuple(new double[] {100, 200, 300, 100, 200, 300, 100, 200, 300});
HTuple colPoints = new HTuple(new double[] {100, 100, 100, 200, 200, 200, 300, 300, 300});
// 进行九点标定相关计算,这里只是示意,实际会更复杂
HTuple homMat2d;
halcon.AffineTransPoint2d(out homMat2d, rowPoints, colPoints);
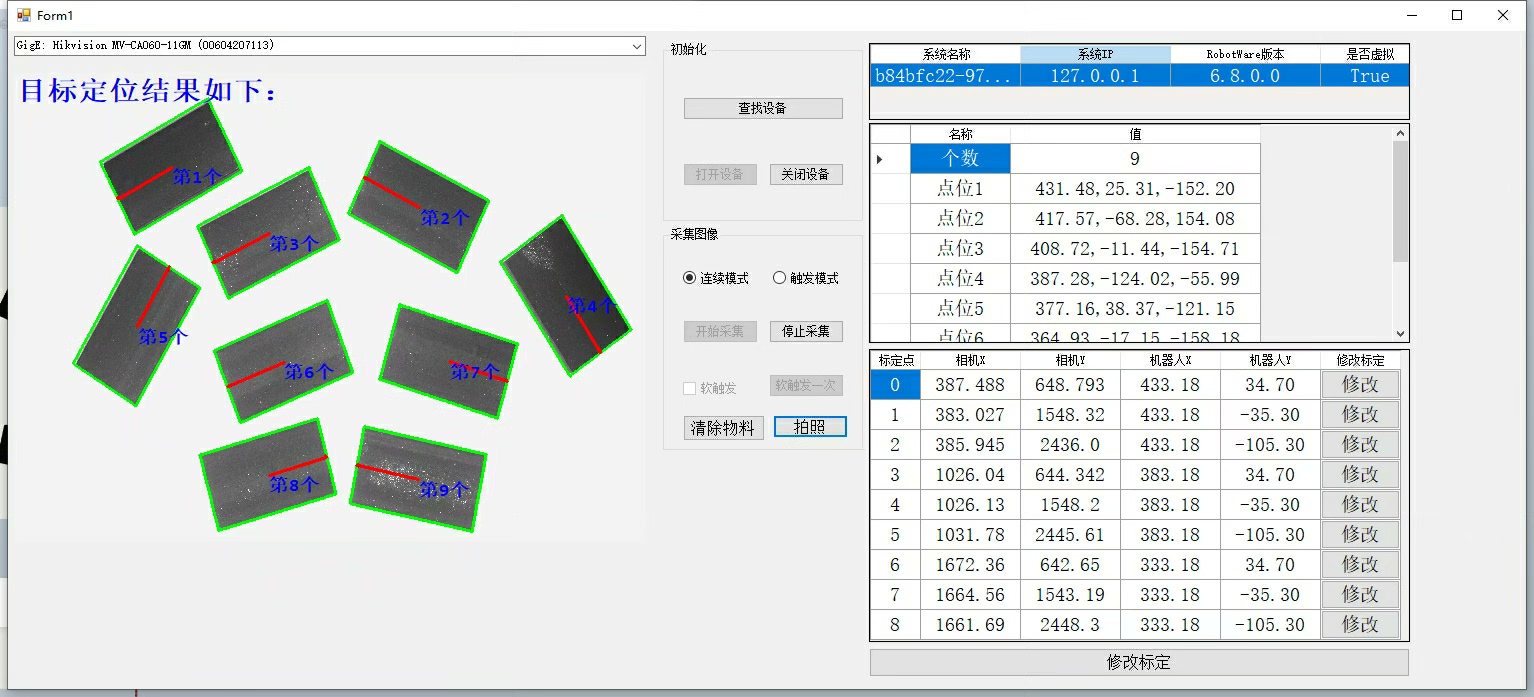
}这里我们先假设获取到了九个点在图像中的行列坐标,分别存储在rowPoints和colPoints中。然后通过halcon.AffineTransPoint2d函数进行仿射变换相关计算,这个计算结果homMat2d在实际九点标定中用于建立图像坐标与实际世界坐标之间的转换关系,虽然这里只是简化示意,但大致思路就是这样,实际项目中还会涉及到更多的参数调整和误差优化。
在RobotStudio的Rapid编程里,也有很多有趣的操作。比如控制机器人移动到视觉识别出的目标位置:
MODULE MainModule
PROC main()
MoveJ pHome, v1000, z100, tool0\WObj:=wobj0;
// 假设获取到目标位置坐标
num targetRow := 250;
num targetCol := 300;
// 通过计算将图像坐标转换为机器人可识别的位置坐标
num targetX := CalculateX(targetRow, targetCol);
num targetY := CalculateY(targetRow, targetCol);
num targetZ := 100;
pose targetPose := pose(targetX, targetY, targetZ, 0, 0, 0);
MoveL targetPose, v500, fine, tool0\WObj:=wobj0;
ENDPROC
ENDMODULE在这段Rapid代码里,一开始机器人先回到初始位置pHome。接着假设获取到目标在图像中的坐标targetRow和targetCol,通过自定义的函数CalculateX和CalculateY将图像坐标转换为实际世界中的X、Y坐标,再设定一个Z坐标,组成目标位置的位姿targetPose,最后通过MoveL指令让机器人直线移动到目标位置进行抓取操作。
总之,通过C#、Halcon和RobotStudio的联合使用,我们能够在虚拟仿真环境中实现ABB机器人的视觉引导抓取,无论是有海康工业相机进行实际采集,还是通过图片仿真,都为我们探索机器人视觉技术提供了丰富的可能性。希望大家都能在这个项目里收获满满,玩得开心!

















 4181
4181

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









