



UUV三维路径跟踪,LOS制导+PID控制实现 模型参数可调,期望轨迹可调,速度可调 MATLAB编程实现 想要可直接联系~~~
水下无人潜器(UUV)的路径跟踪听着高大上,但其实只要抓住LOS制导+PID这对黄金组合,配合MATLAB的矩阵操作,半天就能搭出可调参数的仿真原型。直接上干货!
先搞清LOS制导的核心
LOS(Line of Sight)制导说白了就是让UUV始终朝着"视线方向"前进。三维情况下,我们把期望轨迹拆解成水平面的路径跟踪和垂直面的深度控制。核心公式就这两行:
% 水平面LOS方位角计算
psi_d = atan2(yd - y, xd - x) + atan2(K_los*e, 1);
% 垂直面LOS俯仰角计算
theta_d = atan2(zd - z, sqrt((xd - x)^2 + (yd - y)^2)) + atan2(K_los_z*e_z, 1);这里的K_los是前视距离系数,越大跟踪越激进但可能振荡。调试时建议从0.5开始逐步调整。
PID控制要玩点花样
传统PID直接怼误差容易翻车,咱们把LOS输出的期望角速度作为PID输入:
% 水平面角速度控制
omega_ref = Kp*(psi_d - psi) + Ki*integral_error + Kd*(psi_dot_prev - psi_dot);
% 深度控制推力
Fz = Kp_z*(z_des - z) + Ki_z*integral_z + Kd_z*(z_dot_prev - z_dot);注意这里用了角速度的微分项而不是直接位置微分,实测稳定性提升明显。PID参数建议先用Ziegler-Nichols法粗调,再根据响应微调。
MATLAB实现的关键技巧
- 参数结构体封装所有可调参数,调试时改一个文件就行:
params.speed = 1.5; % 巡航速度
params.K_los = 0.8; % LOS前视系数
params.PID = [2.5, 0.1, 1.2]; % [Kp, Ki, Kd]- 轨迹生成器做成独立函数,支持螺旋线、正弦等多种轨迹:
function [x_d, y_d, z_d] = gen_trajectory(t, type)
if type == "helix"
x_d = 10*cos(0.1*t);
y_d = 10*sin(0.1*t);
z_d = 0.2*t;
end
end- 主循环架构要包含动力学模型,这里简化成二阶积分:
for k = 1:N
[u_ref, v_ref, w_ref] = guidance_system(); % LOS制导
[tau_u, tau_v, tau_w] = pid_controller(); % PID控制
% 动力学更新
vel = vel + (tau - D*vel)*dt;
pos = pos + vel*dt;
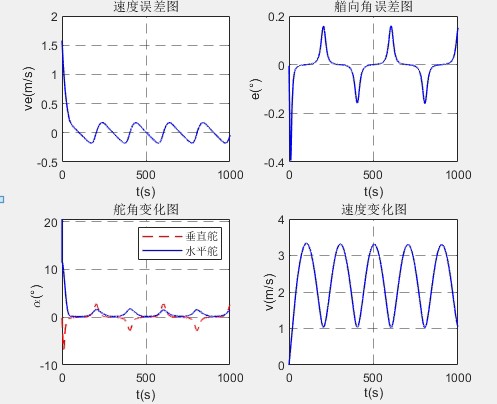
end调试时重点关注这些信号:
- 横向跟踪误差突然增大?调大LOS前视距离
- 深度控制出现超调?降低Kp同时增加Kd
- 转弯时轨迹抖动?检查角速度PID的输出限幅
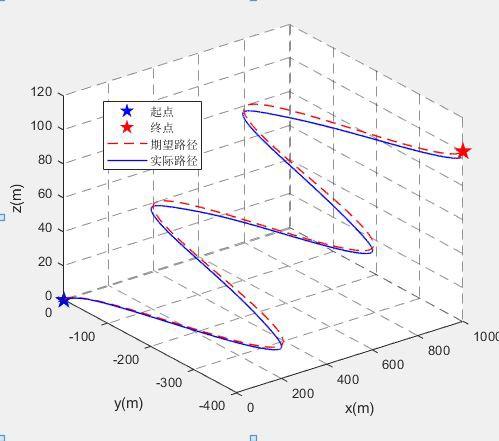
完整的仿真结果应该像这样:蓝色期望轨迹和红色实际轨迹基本重合,误差曲线收敛在5%以内。想要现成代码模板?私信甩你一套经过实测的MATLAB/SIMULINK方案,支持自定义海流干扰模块,改个参数就能看到不同工况下的控制效果对比。

















 323
323

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









