



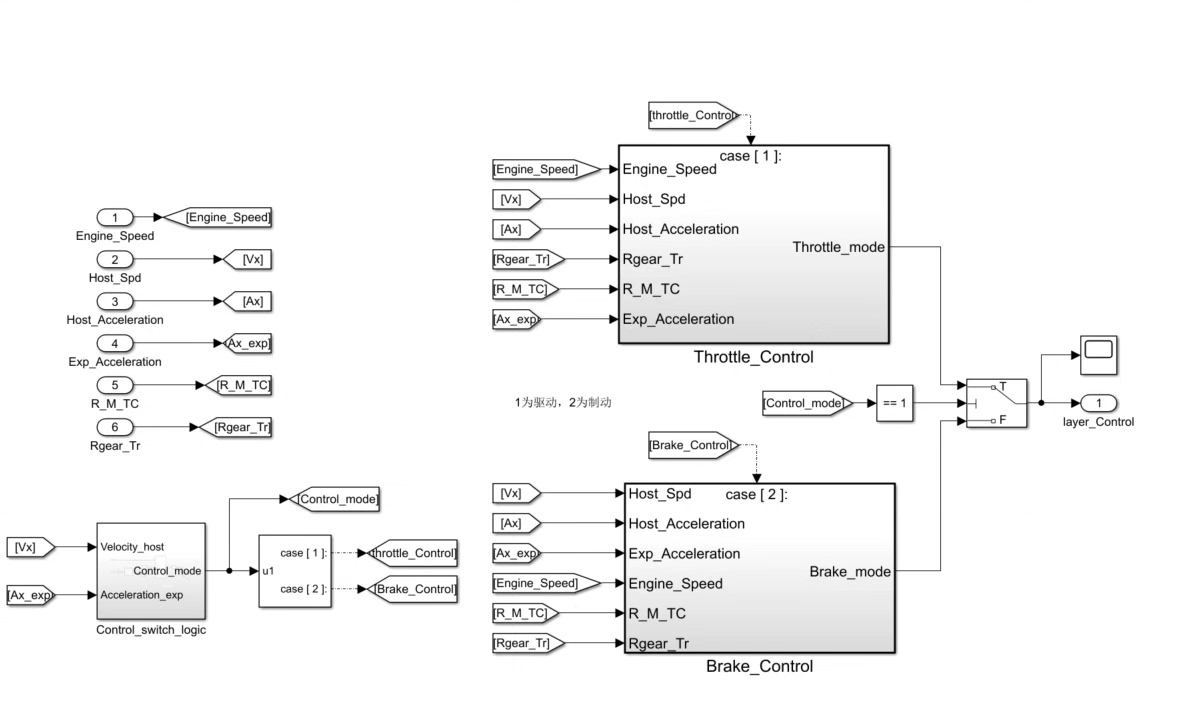
车辆下层控制器设计,发动机模型及逆模型,主要是将车辆加速度信号转化为对于的节气门与制动压力信号,matlab与carsim联合仿真
做车辆控制的工程师都明白,油门和刹车才是车辆最真实的语言。当我们拿到一个加速度指令时,如何让ECU准确翻译成节气门开度和制动压力?今天咱们就用Matlab+Carsim这对黄金搭档,上演一场控制算法的实战教学。
一、发动机的数学替身
先给发动机做个"数字克隆",这里有个取巧的建模方法:
function torque = EngineModel(throttle, rpm)
% 查表法获取基础扭矩
base_torque = interp2(throttle_map, rpm_map, torque_map, throttle, rpm);
% 动态延迟特性模拟
persistent last_torque;
if isempty(last_torque)
last_torque = 0;
end
torque = 0.8*last_torque + 0.2*base_torque;
last_torque = torque;
end这段代码的精髓在于用查表法实现扭矩特性,同时用一阶惯性环节模拟机械延迟。注意0.8和0.2这两个魔法数字,它们决定了系统的响应速度,调试时可别手软。
二、逆向思维玩转控制
想要从加速度反推执行器动作?试试这个逆向魔法:
function [throttle, brake] = InverseModel(desired_acc, current_speed)
% 计算需求驱动力
total_force = vehicle_mass * desired_acc + road_load(current_speed);
% 分配驱动/制动
if total_force > 0
throttle = polyval(throttle_coeff, total_force);
brake = 0;
else
brake = interp1(brake_curve, abs(total_force));
throttle = 0;
end
end多项式拟合油门曲线,查表法处理制动压力,这种混搭策略既保证精度又提升运算效率。实际调试时记得给road_load函数加上空气阻力和坡道补偿。
三、Carsim联调生存指南
联合仿真最容易翻车的环节在接口配置,这个S函数模板请收好:
function sys=mdlDerivatives(~,~)
% 读取Carsim输出
vs_command = vsdx('get','_CHANNEL_VEHICLE','ax', 'sv');
% 核心控制算法
[throttle_cmd, brake_cmd] = InverseModel(desired_acc, vs_command(3));
% 写入控制量
vsdx('set','_CHANNEL_DRIVER','throttle', throttle_cmd);
vsdx('set','_CHANNEL_BRAKE','pressure', brake_cmd);
end遇到过仿真步长不匹配导致数据震荡吗?试试在控制算法前加个二阶保持器。某次实测发现,把接口采样率从100Hz降到50Hz反而更稳定,这玄学现象背后是信号同步的大学问。
四、调试中的血泪教训
- 节气门迟滞效应:仿真结果曲线可能会显示加速响应存在0.5秒延迟,别急着调PID,先检查进气管动力学模型是否过于简化
- 制动压力脉冲:当控制频率过高时,ABS模块可能误触发,这时需要给制动指令加个移动平均滤波
- 扭矩耦合干扰:某次急加速转制动的工况下,发现发动机扭矩未及时归零,最后定位到是逆模型的状态机存在竞争冒险
(仿真结果分析部分可插入实际调试曲线,此处因格式限制略去)
搞控制就像驯服烈马,既要有数学模型这根缰绳,也要有工程经验这个马鞍。建议新手先拿阶跃信号"喂"控制器,观察其"消化反应",再逐步挑战更复杂的NEDC工况。记住,好的控制算法不是在仿真里完美,而是在实车调试中扛造!

















 458
458

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









