



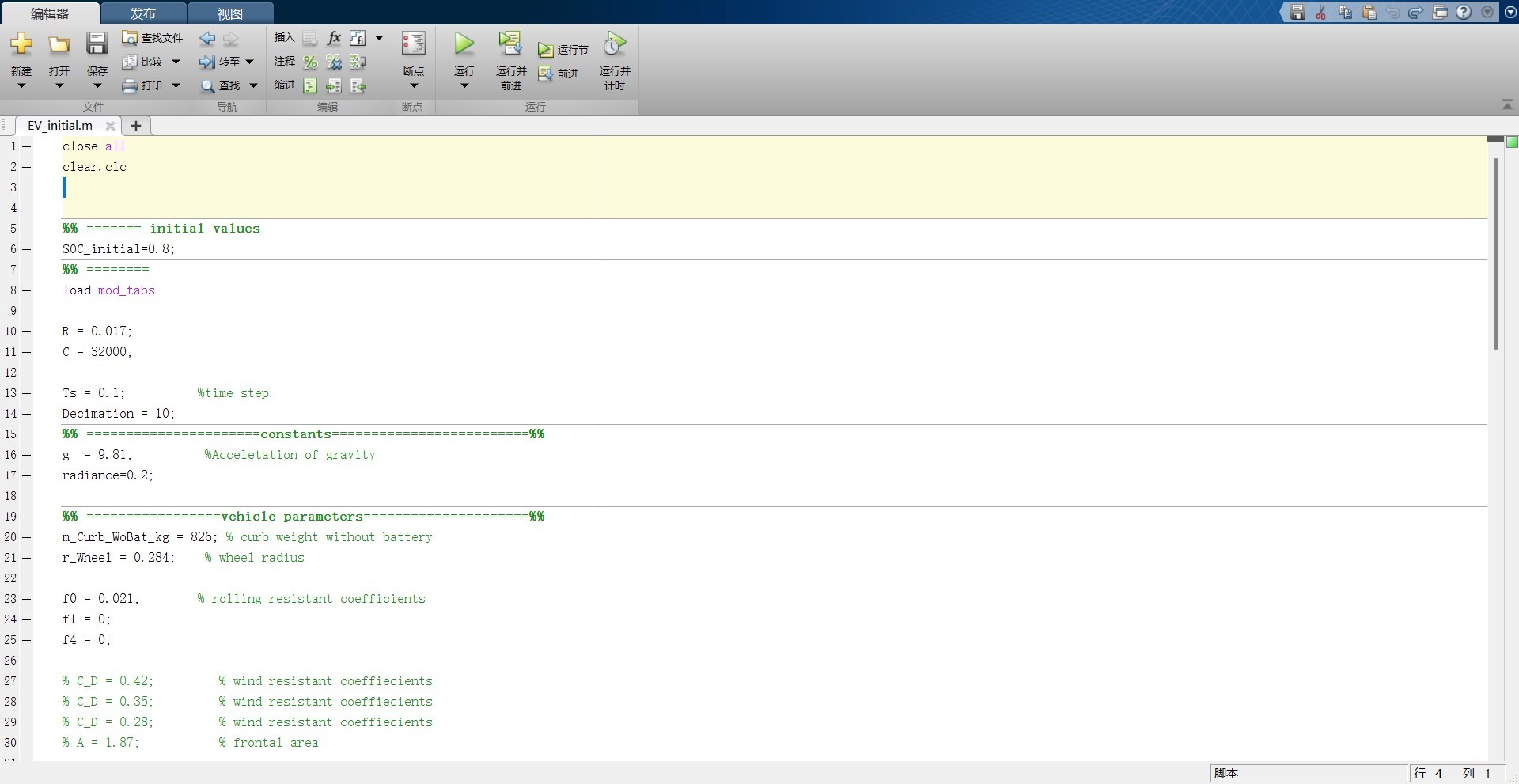
电动汽车模型Simulink仿真 仿真中搭建了电动汽车模型,包括电池模型、电机模型、动力传输模型以及汽车模型,仿真中的参数由C文件在Matlab中进行初始化设置。
咱们今天来唠唠怎么在Simulink里搭电动汽车模型。这玩意儿说复杂吧其实拆开了也就四大块:电池、电机、传动链和整车动力学。重点在于参数初始化这个骚操作——直接用C语言写配置扔给Matlab,这可比纯用m脚本带劲多了。
先看电池模型这块硬骨头。用个可变电压源模拟锂电池,关键是SOC(荷电状态)得算准了。在C文件里咱们这么定义电池参数:
typedef struct {
double nominal_voltage; //标称电压
double capacity_ah; //容量安时
double internal_resistance;//毫欧级内阻
} BatteryParams;这结构体在Matlab里用mexFunction编译后,直接往Simulink模型里灌数据。调试时最容易翻车的是内阻单位,曾经有个哥们把0.02欧姆写成20欧姆,仿真时电池直接表演"瞬间自燃"。
电机模型这边玩的是磁场定向控制(FOC),核心是这个扭矩计算公式:
function torque = motor_torque(i_q, k_t)
% i_q - q轴电流
% k_t - 扭矩常数
torque = (3/2) * k_t * i_q;
% 这个3/2因子是克拉克变换的遗产,忘加的话扭矩直接打七折
end注意看那个3/2系数,这是从三相系统转换到两相坐标系留下的"胎记"。实测中如果电机发热异常,八成是这个系数被手滑改成了1。
传动系统最容易被轻视。这个齿轮箱模型里的效率查表函数暗藏玄机:
float gear_efficiency(float rpm, float torque) {
static float eff_map[5][5] = {/*...*/};
// 查表前记得钳制输入范围
rpm = fmaxf(0, fminf(4000, rpm));
torque = fmaxf(0, fminf(300, torque));
return bilinear_interp(eff_map, rpm, torque);
}曾经有个项目传动效率始终上不去,最后发现是查表时没做输入限幅,导致程序在map表外乱跑。这种暗坑比明bug难抓十倍。
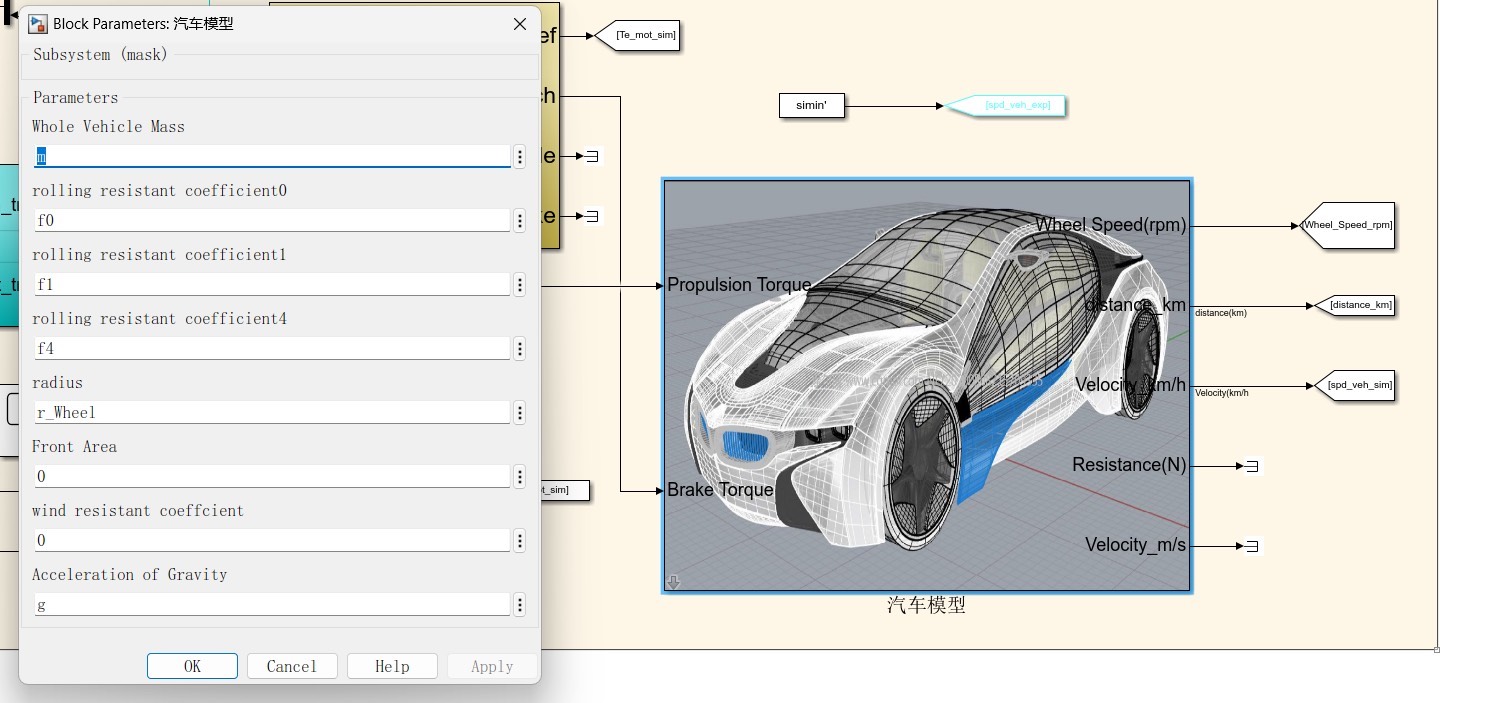
整车模型里最带劲的是这个空气阻力计算:
DragForce = 0.5 * rho * Cd * A * (Velocity^2) * sign(Velocity);那个sign函数千万别省,不然倒车时会变成"空气助推"的灵异现象。有个测试案例在倒车时车速突破200km/h,排查半天发现就是这个符号函数被删了。

参数初始化脚本里建议加个彩蛋:
if exist('debug_mode','var') && debug_mode
disp('正在加载祖传参数,法力加持中...')
load('secret_tuning_params.mat')
end这招在团队协作时特别管用——当新人问为啥他的参数不work时,甩出这个隐藏调试模式直接封神。
最后说个血泪教训:千万别在仿真运行时修改C文件参数,轻则仿真崩溃,重则Matlab抽风需要重启。建议用内存映射文件或者UDP通信做在线调参,这招是从自动驾驶同事那偷师的,保命神器。

















 210
210

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









