



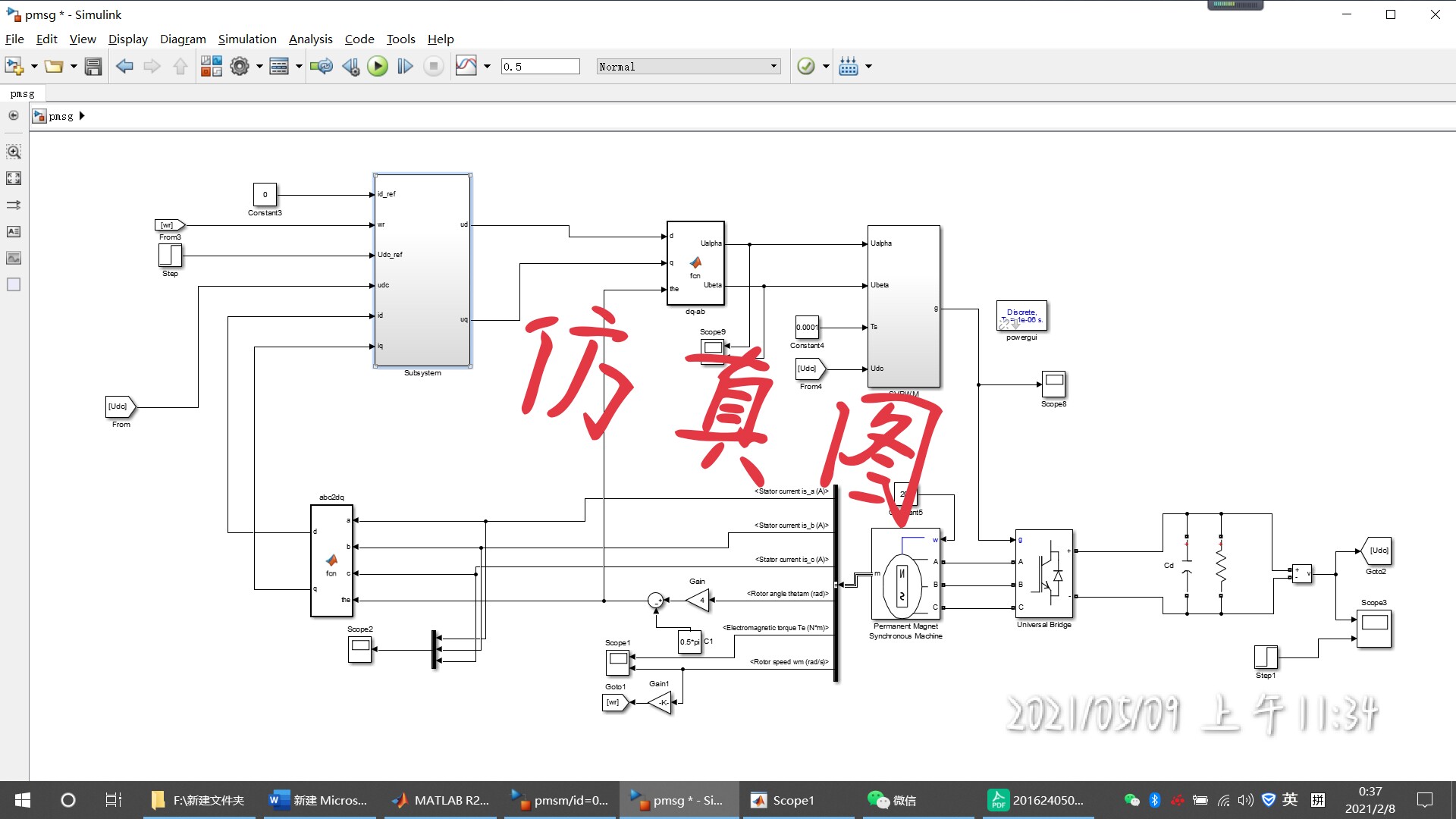
PMSG并网直流微网 原理:外环采用电压环,稳定直流母线电压,电流采用电流环
永磁同步发电机(PMSG)并网直流微电网这两年可是新能源圈子的当红炸子鸡。这货最骚的操作就是双闭环控制——外环电压环稳住直流母线,内环电流环精准把控。今天咱们就扒开它的代码外衣,看看里面藏着什么硬核操作。
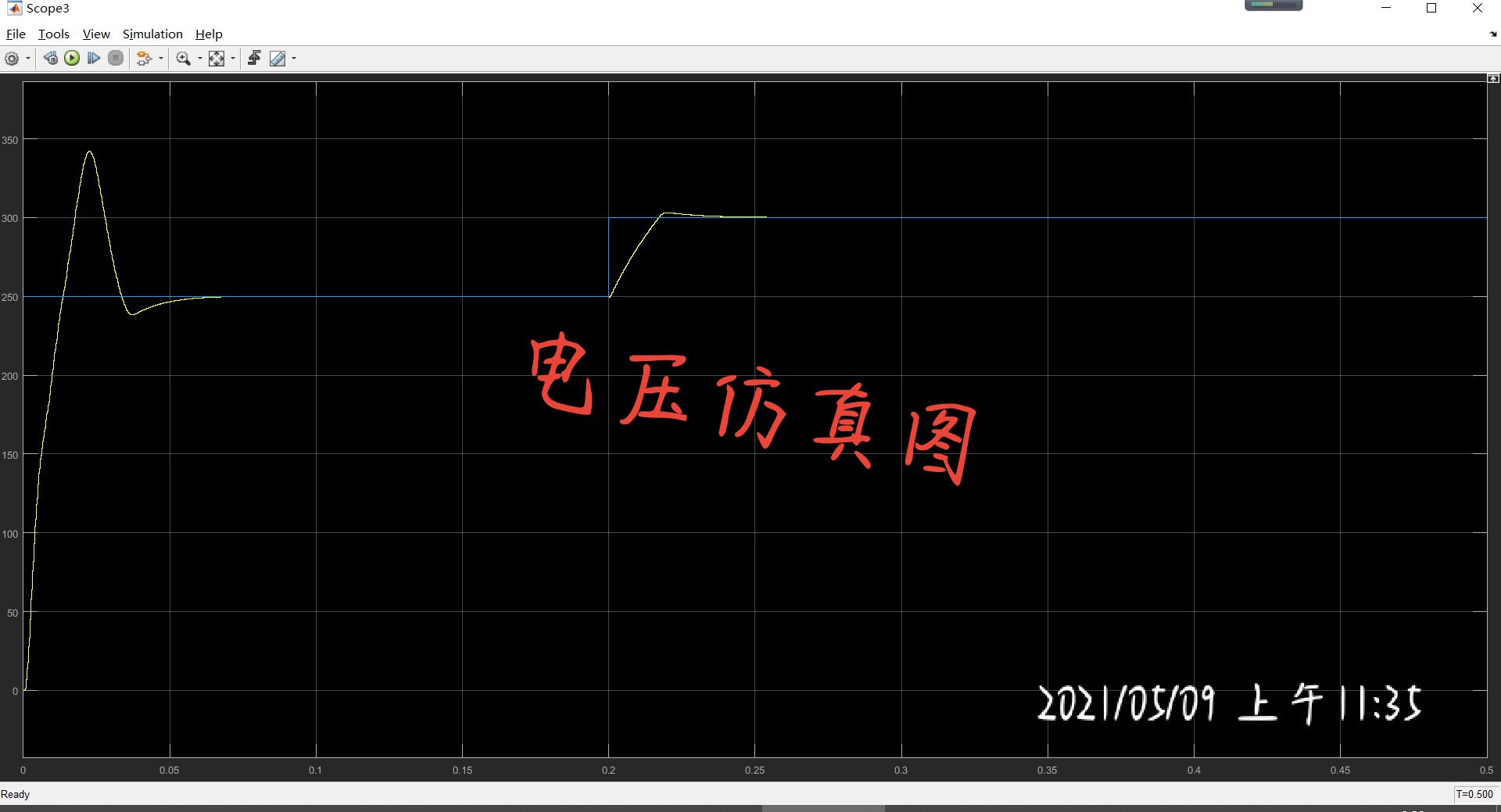
先说电压环这个"交通指挥"。它得时刻盯着直流母线电压V_dc,要是检测到电压波动,立马给电流环下指令调整输出电流。看看这个用C写的PID核心代码:
float voltage_loop(float V_ref, float V_dc) {
static float integral = 0;
float error = V_ref - V_dc;
// 抗积分饱和处理
if(fabs(integral) < INTEGRAL_LIMIT) {
integral += Ki_v * error * Ts;
}
float output = Kp_v * error + integral;
return output > CURRENT_LIMIT ? CURRENT_LIMIT : output;
}这个代码暗藏玄机:Kiv是积分系数,Kpv是比例系数。注意那个if判断可不是摆设——当积分项超过预设限幅时自动锁死,防止系统震荡。就像老司机踩油门,该收的时候绝不拖泥带水。
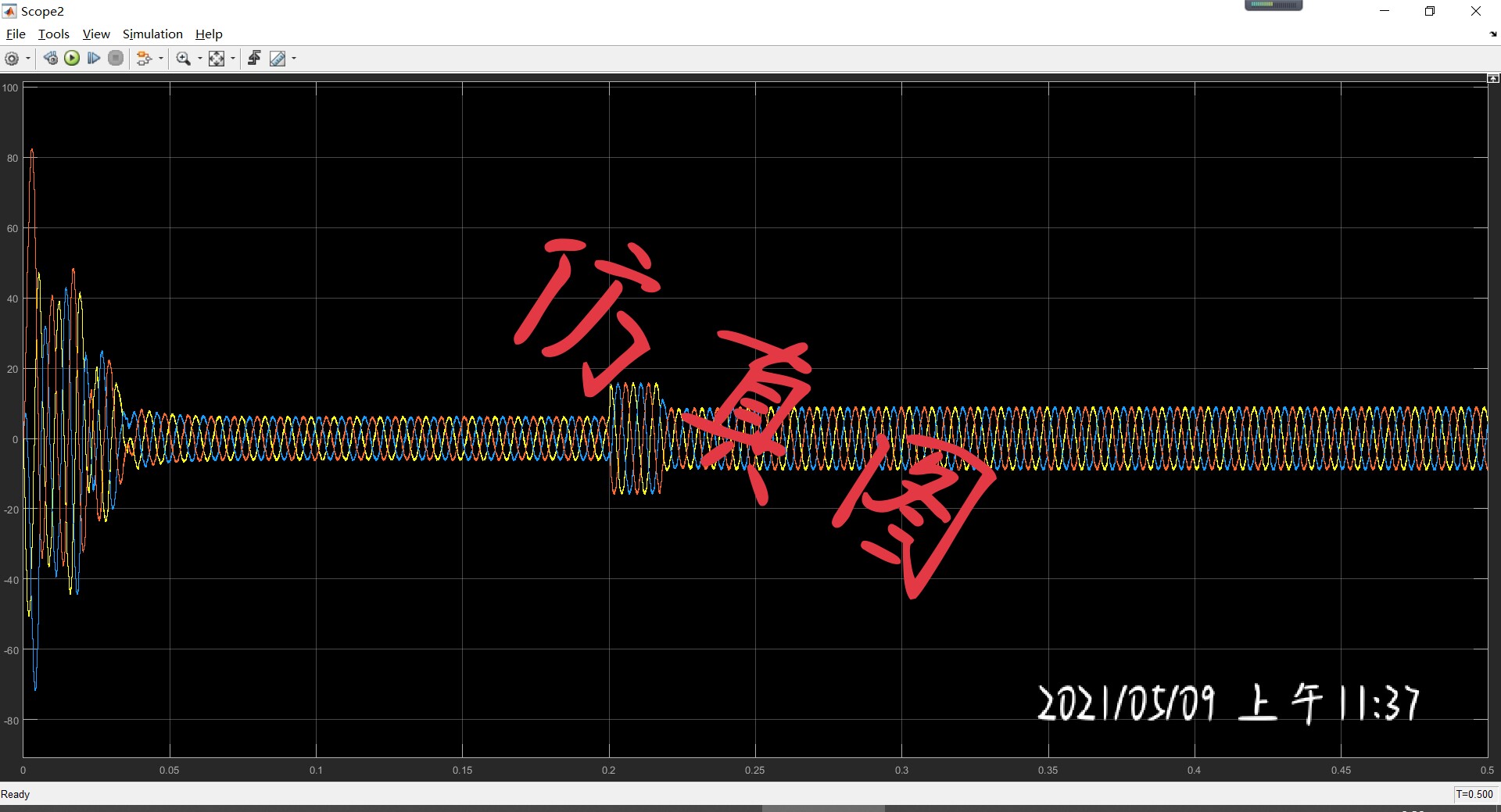
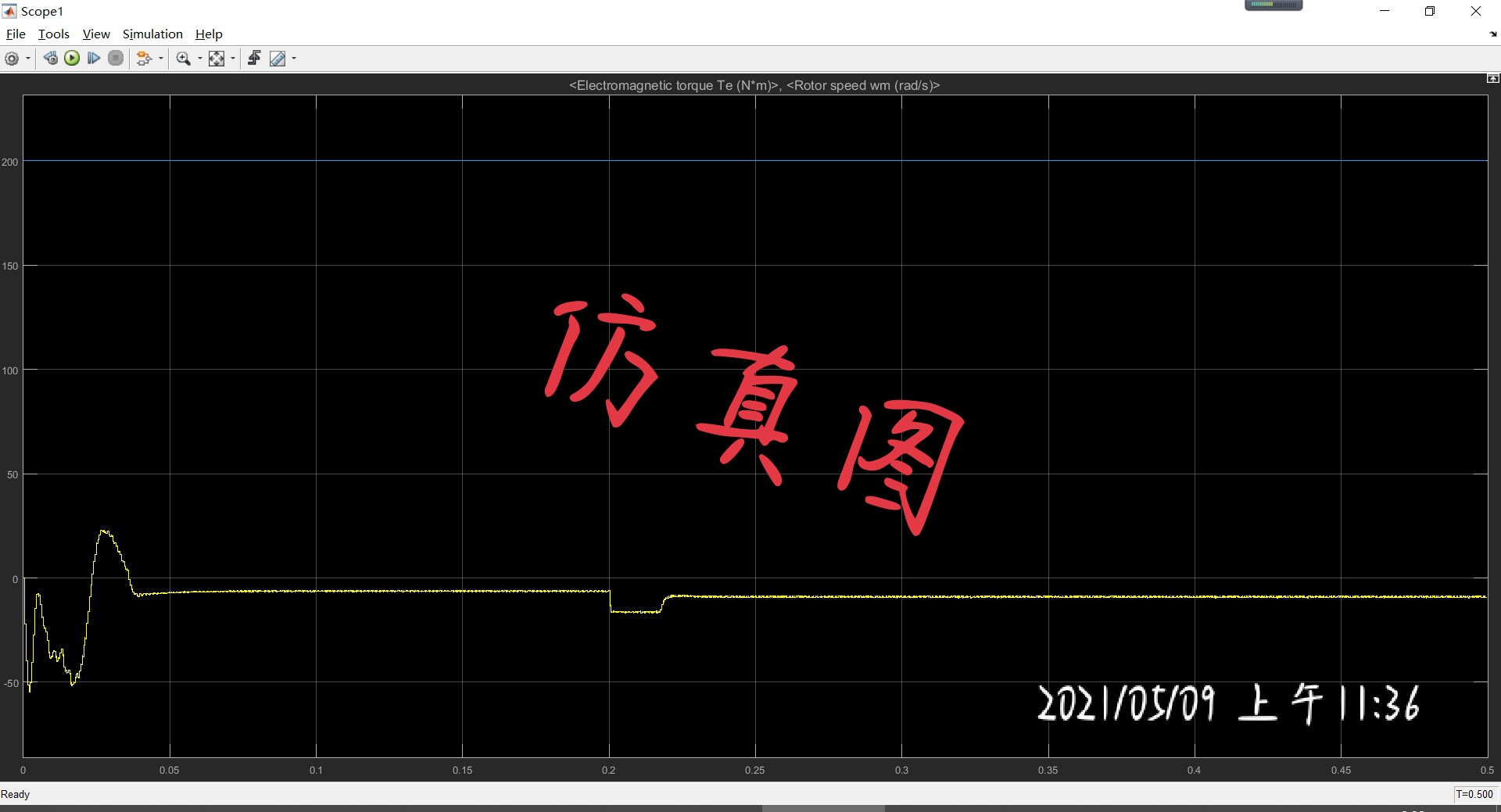
电流环接到电压环的指令后,立马变身行动派。它得在0.5ms内完成电流跟踪,比闪电侠还快。Simulink里常见的滞环控制模块,底层代码其实是这样的:
function duty = current_hysteresis(I_ref, I_actual)
persistent hysteresis_band;
if isempty(hysteresis_band)
hysteresis_band = 0.05; % 5%容差带
end
error = I_ref - I_actual;
if error > hysteresis_band
duty = 1; % 全开
elseif error < -hysteresis_band
duty = 0; % 全关
else
duty = nan; % 保持当前状态
end
end这个滞环控制就像智能恒温空调——电流比目标值高过容差带就关断,低过就全开,中间地带保持现状。nan返回值相当于给PWM模块发"保持原样"的暗号。
实战中经常要处理母线电压突然跌落的情况。这时候双环控制的联动反应才是真考验,看看这个动态调整策略:
def dynamic_compensation(V_dc):
global Kp_v, Ki_v
if V_dc < 0.95 * V_nominal:
Kp_v *= 1.2 # 增强比例作用
Ki_v *= 0.8 # 削弱积分作用
elif V_dc > 1.05 * V_nominal:
Kp_v *= 0.8
Ki_v *= 1.2
else:
pass这个自适应策略像极了老中医把脉——电压跌了就加大比例系数快速响应,同时抑制积分防止过冲;电压过高就反过来操作。比起固定参数,系统鲁棒性直接提升一个Level。
最后给新手们提个醒:调参时别光盯着示波器波形,记得用MATLAB做频域分析。下面这个扫频脚本能帮你找到谐振点:
bode(sys_voltage_loop);
hold on;
bode(sys_current_loop);
legend('电压环','电流环');
grid on;
% 重点看两环带宽是否相差5倍以上双环控制最怕"环环相撕",电压环带宽一般设在20-50Hz,电流环得飙到200Hz以上才能避免互相干扰。就像交响乐团,指挥(电压环)打拍子,乐手(电流环)得跟得上节奏。
搞明白这些门道,下次再看到直流微网炸电容或者IGBT爆管,至少能淡定地掏出万用表而不是急着拔电源了。毕竟,玩转新能源系统,代码和原理总得有一个在路上。

















 64
64

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









