



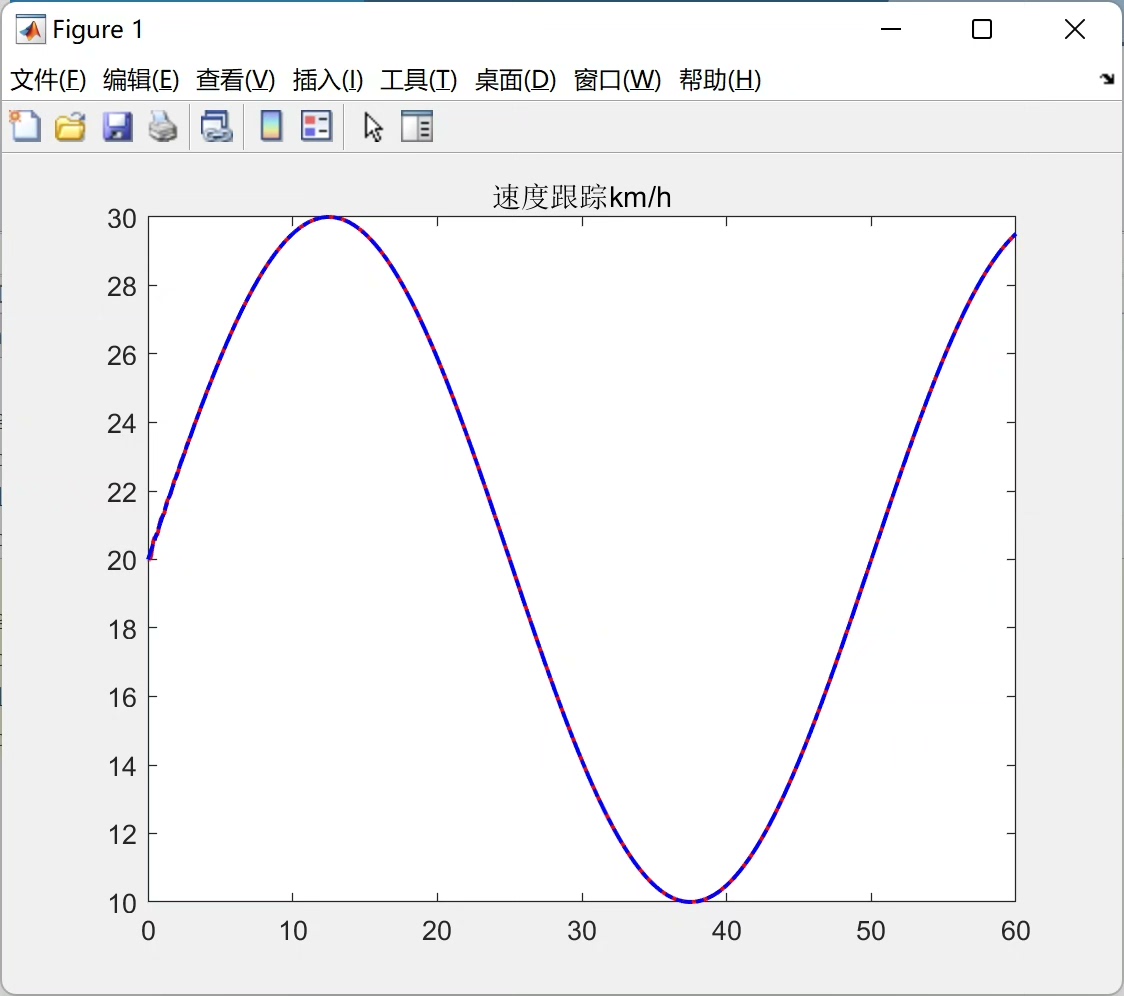
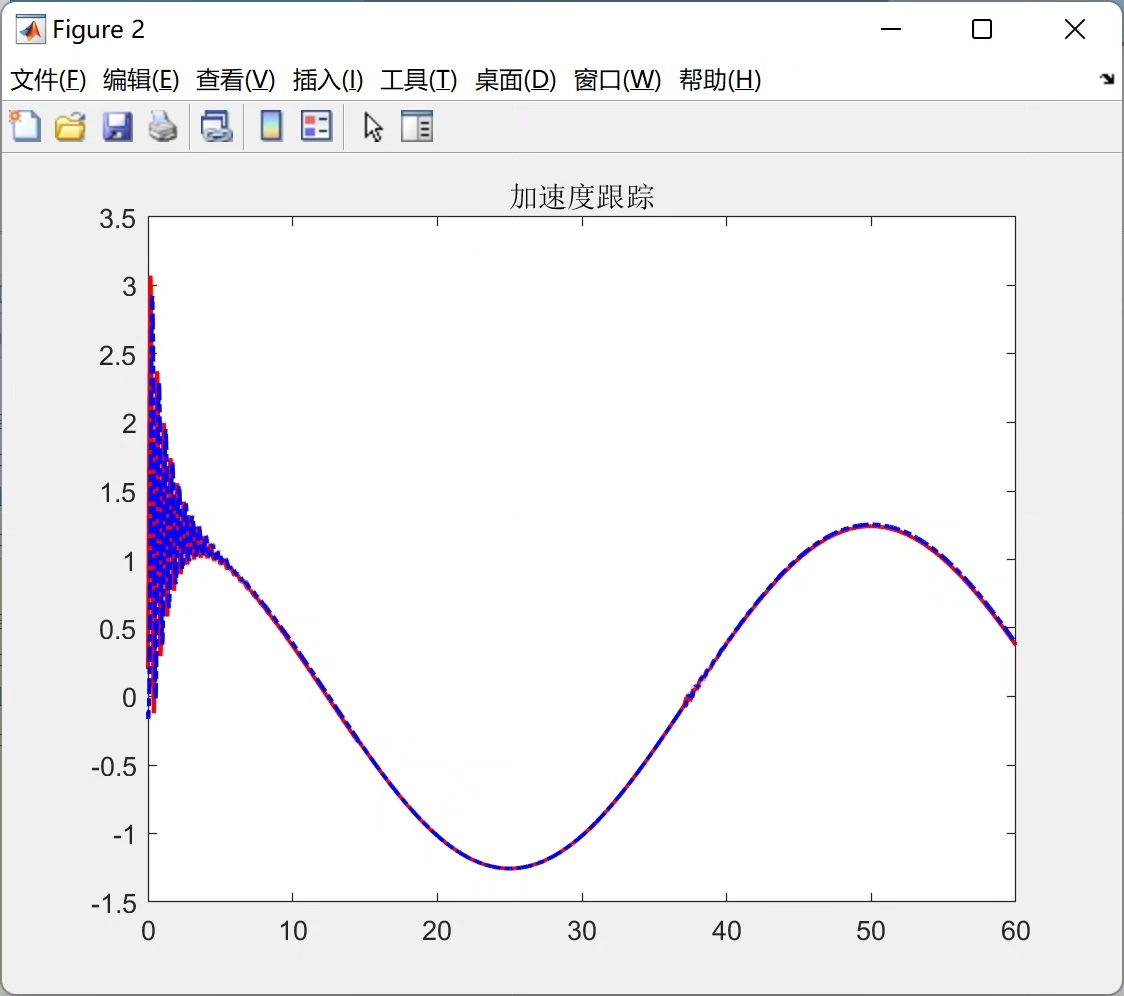
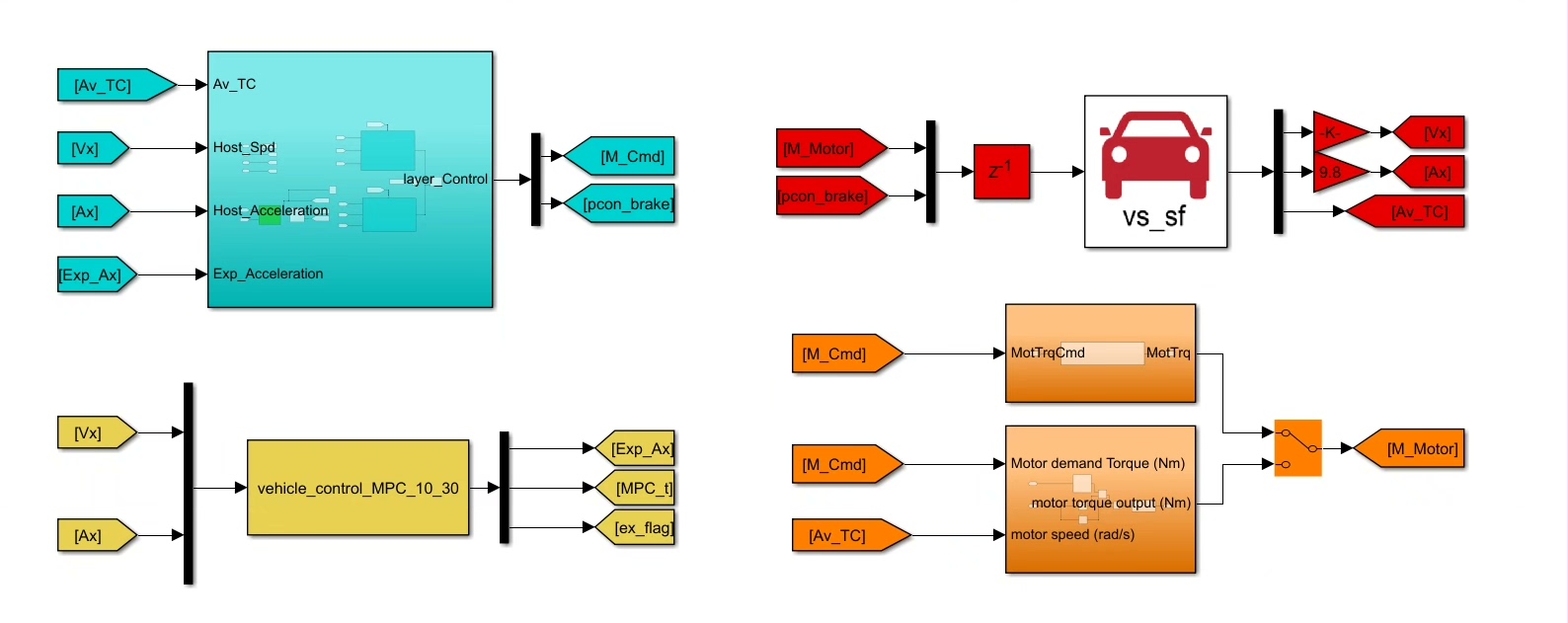
电动汽车纵向速度MPC控制器。 采用上层控制器和下层控制器。 目标为控制车辆的纵向速度,使其跟踪上期望纵向速度曲线。 ●上层控制器:控制方式为MPC控制器,输入为车辆纵向速度和纵向加速度,输出为期望加速度,并且对加速度增加进行约束。 ●下层控制器:车辆的制动根据逆向纵向动力学模型搭建、车辆的驱动根据电机MAP图搭建。 包含驱动制动切换逻辑、PID控制器等模块。 ●可实现正弦速度曲线的速度加速度的准确跟踪,以及五次多项式速度曲线的速度和加速度跟踪。
在电动汽车的控制系统中,纵向速度的精准控制至关重要。今天咱就来聊聊这个超有趣的电动汽车纵向速度MPC控制器。
整体架构:上下层协作
这套控制系统采用了上层控制器和下层控制器的架构。目标很明确,就是要控制车辆的纵向速度,让它完美跟踪上期望纵向速度曲线。
上层控制器:MPC的舞台
上层控制器采用的是MPC(模型预测控制)控制器。简单说,它把车辆纵向速度和纵向加速度当作输入,然后输出期望加速度。不过呢,为了确保车辆运行的安全性和稳定性,这里对加速度增加进行了约束。
咱来看段简单的代码示例(这里以Python伪代码示意):
# 定义MPC控制器类
class MPCController:
def __init__(self, acceleration_limit):
self.acceleration_limit = acceleration_limit
def compute_acceleration(self, current_velocity, current_acceleration, desired_velocity):
# 这里简单示意,实际MPC计算复杂得多
predicted_acceleration = (desired_velocity - current_velocity) / 1.0 - current_acceleration
if predicted_acceleration > self.acceleration_limit:
return self.acceleration_limit
elif predicted_acceleration < -self.acceleration_limit:
return -self.acceleration_limit
return predicted_acceleration在这段代码里,MPCController类初始化时设定了加速度限制accelerationlimit。computeacceleration方法接收当前速度、当前加速度和期望速度作为参数,计算预测加速度。如果预测加速度超出限制,就返回限制值,保证了加速度在安全合理范围内。
下层控制器:驱动制动大揭秘
下层控制器可是个多面手。车辆的制动是根据逆向纵向动力学模型搭建的,驱动则是依据电机MAP图搭建。这里面还包含驱动制动切换逻辑、PID控制器等模块。
比如驱动制动切换逻辑代码(还是Python伪代码):
# 驱动制动切换逻辑函数
def drive_brake_switch(current_velocity, desired_acceleration):
if desired_acceleration >= 0:
# 驱动逻辑,根据电机MAP图查找对应驱动参数
return "drive", find_drive_params(current_velocity, desired_acceleration)
else:
# 制动逻辑,根据逆向纵向动力学模型计算制动参数
return "brake", calculate_brake_params(current_velocity, desired_acceleration)这段代码根据期望加速度判断是驱动还是制动状态,然后调用相应的函数获取参数。
PID控制器也是下层控制器的关键部分,它能让实际输出更接近目标值。代码示例:
# PID控制器类
class PIDController:
def __init__(self, kp, ki, kd):
self.kp = kp
self.ki = ki
self.kd = kd
self.integral = 0
self.prev_error = 0
def compute_control_signal(self, setpoint, process_variable):
error = setpoint - process_variable
self.integral += error
derivative = error - self.prev_error
control_signal = self.kp * error + self.ki * self.integral + self.kd * derivative
self.prev_error = error
return control_signal在这段代码里,PIDController类初始化时设定了比例(kp)、积分(ki)、微分(kd)系数。computecontrolsignal方法根据设定值和当前过程变量计算误差,进而计算出控制信号。
强大的跟踪能力
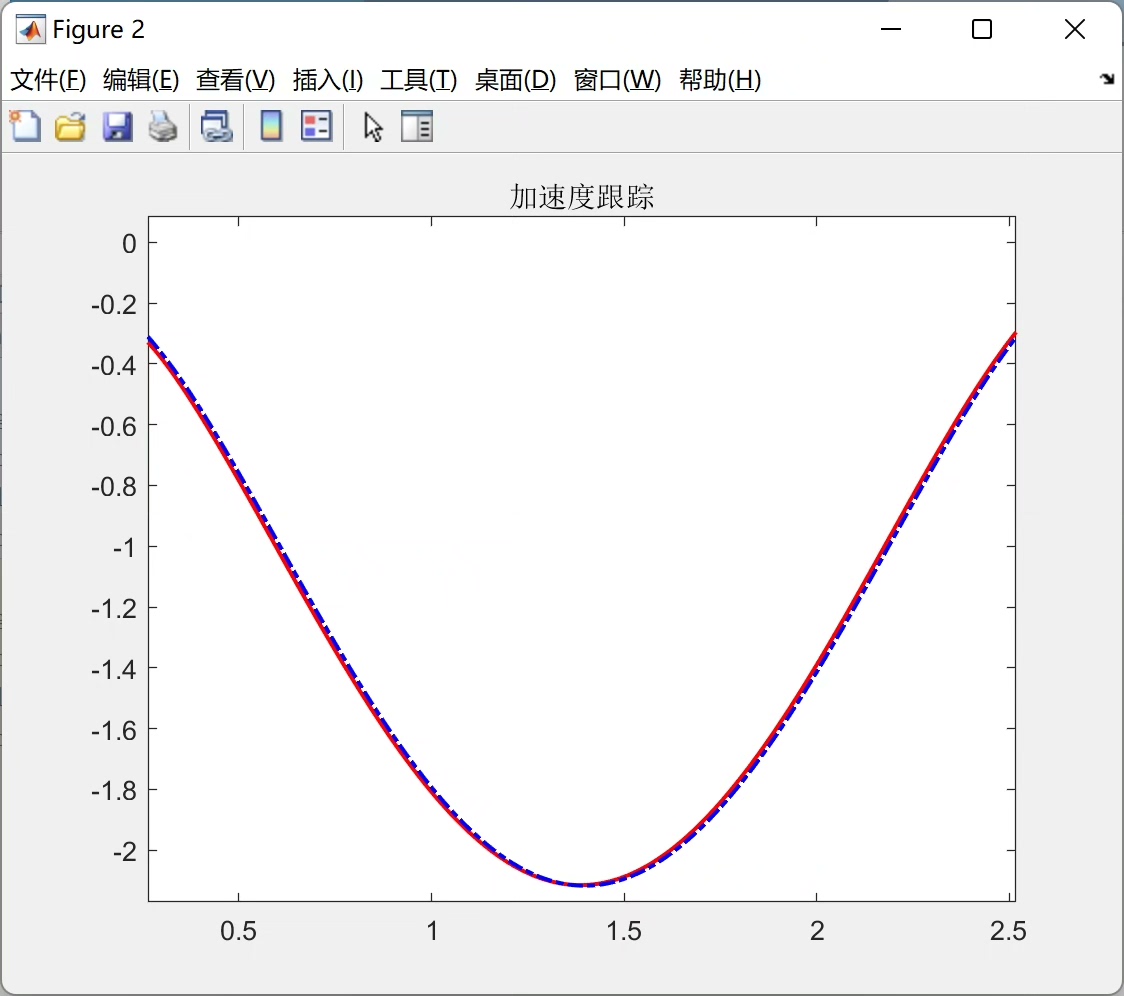
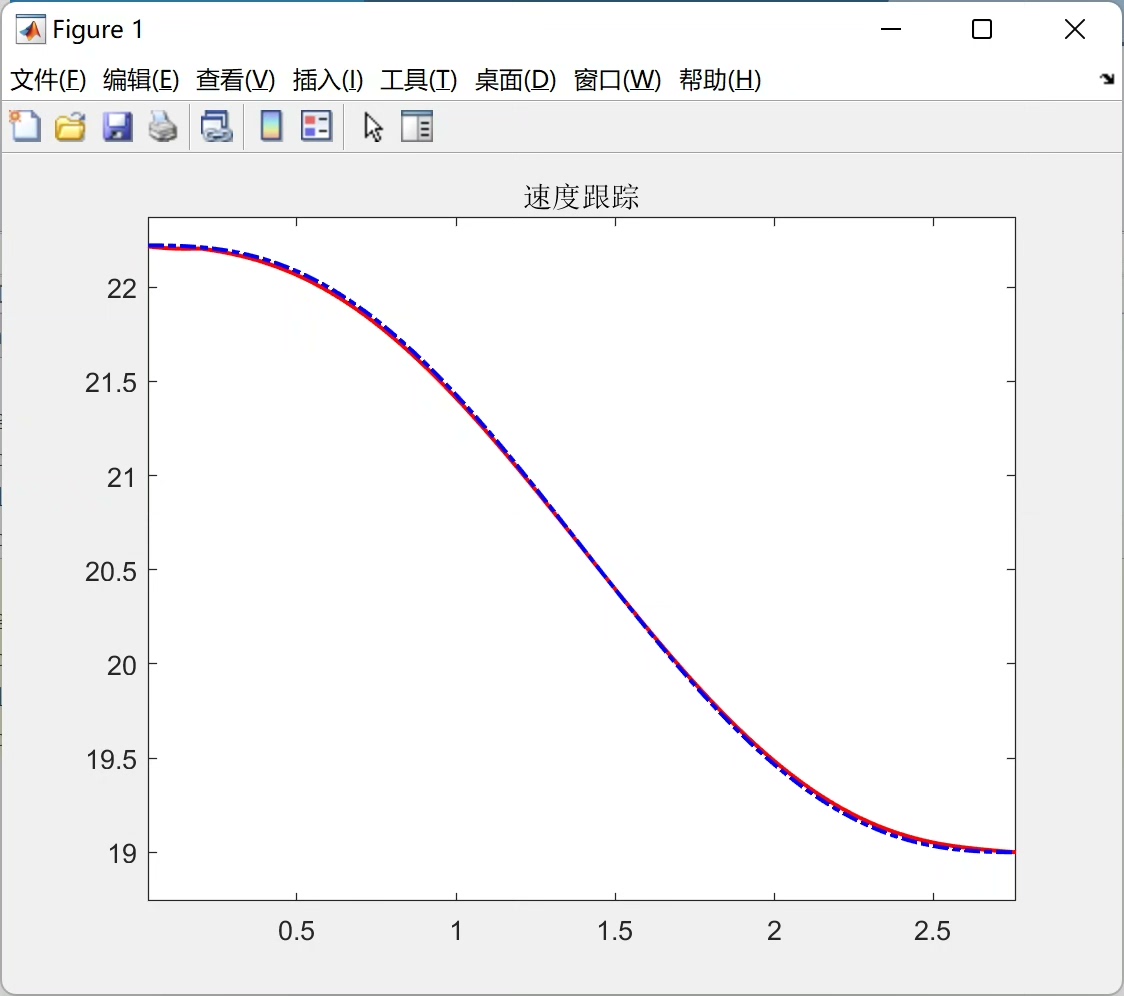
这套系统厉害之处在于,它既能实现正弦速度曲线的速度加速度的准确跟踪,也能搞定五次多项式速度曲线的速度和加速度跟踪。不管是哪种复杂的期望速度曲线,电动汽车纵向速度MPC控制器都能带领车辆精准跟上节奏。
通过上下层控制器的紧密配合,电动汽车纵向速度MPC控制器为车辆的安全、稳定、高效运行提供了坚实保障,在电动汽车控制领域发挥着举足轻重的作用。

















 1027
1027

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









