 SMO+PLL与MARS二合一观测器解析
SMO+PLL与MARS二合一观测器解析




SMO+PLL滑膜观测器、MARS模型参考自适应观测器二合一 (1)SMO+PLL滑膜观测器通过SMO估计电机的转速和位置信息,并利用PLL技术对这些信息进行跟踪和校正,以实现高精度的电机控制; (2)MARS是一种基于模型参考自适应控制理论的观测器。 它通过比较参考模型与实际系统输出之间的误差,并利用自适应算法调整观测器的参数,使得观测器的输出能够逼近实际系统的输出。 模型亮点: (1)SMO与MARS观测器模型二合一,方便对比学习,其他人都是两个不同的电机模型,不同参数的双闭环,我帮您调好了参数放到同一个模型当中对比; (2)有袁雷的电子书籍帮助原理学习,这本书包括非常多的电机控制算法,方便后续学习;
在电机控制领域,观测器就像是电机的“眼睛”,帮助我们精准掌握电机的运行状态。今天要给大家介绍的是两种强大的电机观测器——SMO + PLL滑膜观测器和MARS模型参考自适应观测器,更厉害的是,它们被巧妙地合二为一了。
SMO+PLL滑膜观测器:精准估计与校正
首先来看看SMO + PLL滑膜观测器。SMO,也就是滑膜观测器,它能够估计电机的转速和位置信息。这就好比我们在黑暗中通过一些线索去推测一个物体的运动速度和位置。
下面是一段简单的Python伪代码来模拟SMO估计转速和位置的过程:
# 模拟SMO估计转速和位置
def SMO_estimation(voltage, current):
# 这里简单假设根据电压和电流来估计转速和位置
# 实际中需要复杂的数学模型
estimated_speed = voltage * 0.5 + current * 0.3
estimated_position = voltage * 0.2 + current * 0.6
return estimated_speed, estimated_position在这段代码中,我们定义了一个SMO_estimation函数,它接收电压和电流作为输入,然后根据简单的公式来估计转速和位置。当然,实际的SMO算法要复杂得多,这里只是为了便于理解。
有了估计的转速和位置信息后,PLL(锁相环)技术就派上用场了。PLL就像是一个“纠偏小能手”,它对SMO估计的信息进行跟踪和校正,从而实现高精度的电机控制。
MARS模型参考自适应观测器:逼近实际输出
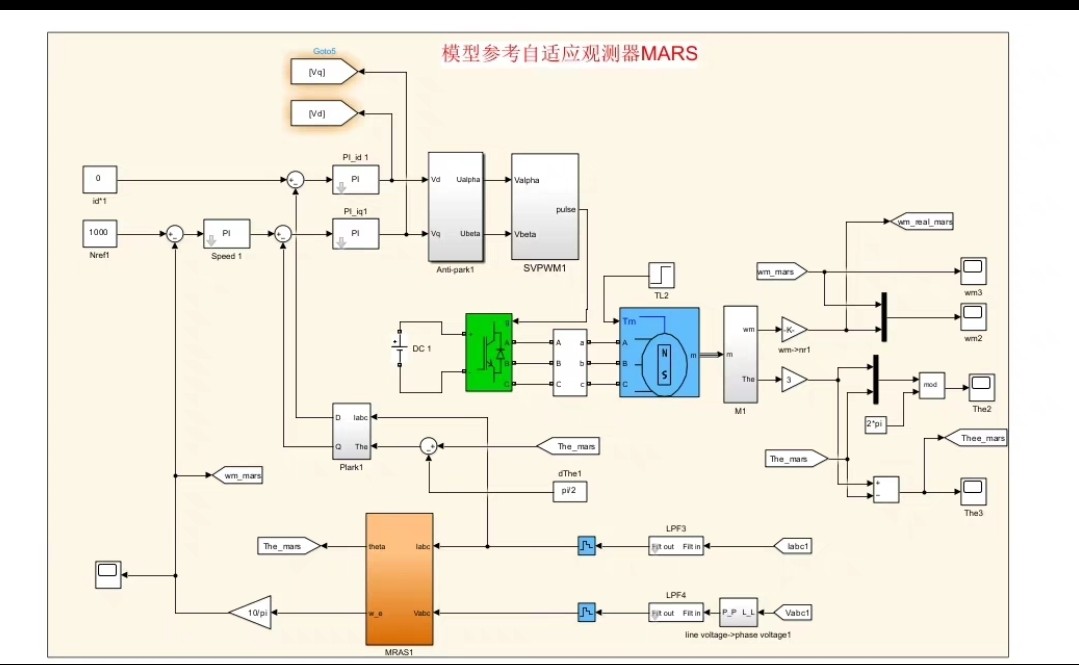
MARS是基于模型参考自适应控制理论的观测器。它的工作原理是比较参考模型与实际系统输出之间的误差,然后利用自适应算法调整观测器的参数,让观测器的输出尽可能逼近实际系统的输出。
下面是一段简单的代码来模拟MARS的工作过程:
# 模拟MARS观测器
def MARS_observer(reference_output, actual_output, current_parameters):
error = reference_output - actual_output
# 简单的自适应调整参数的方法
new_parameters = current_parameters + error * 0.1
return new_parameters在这个代码中,MARS_observer函数接收参考输出、实际输出和当前参数作为输入,计算误差,然后根据误差调整参数。这里的自适应算法只是一个简单的示例,实际应用中会更复杂。
模型亮点:二合一的优势
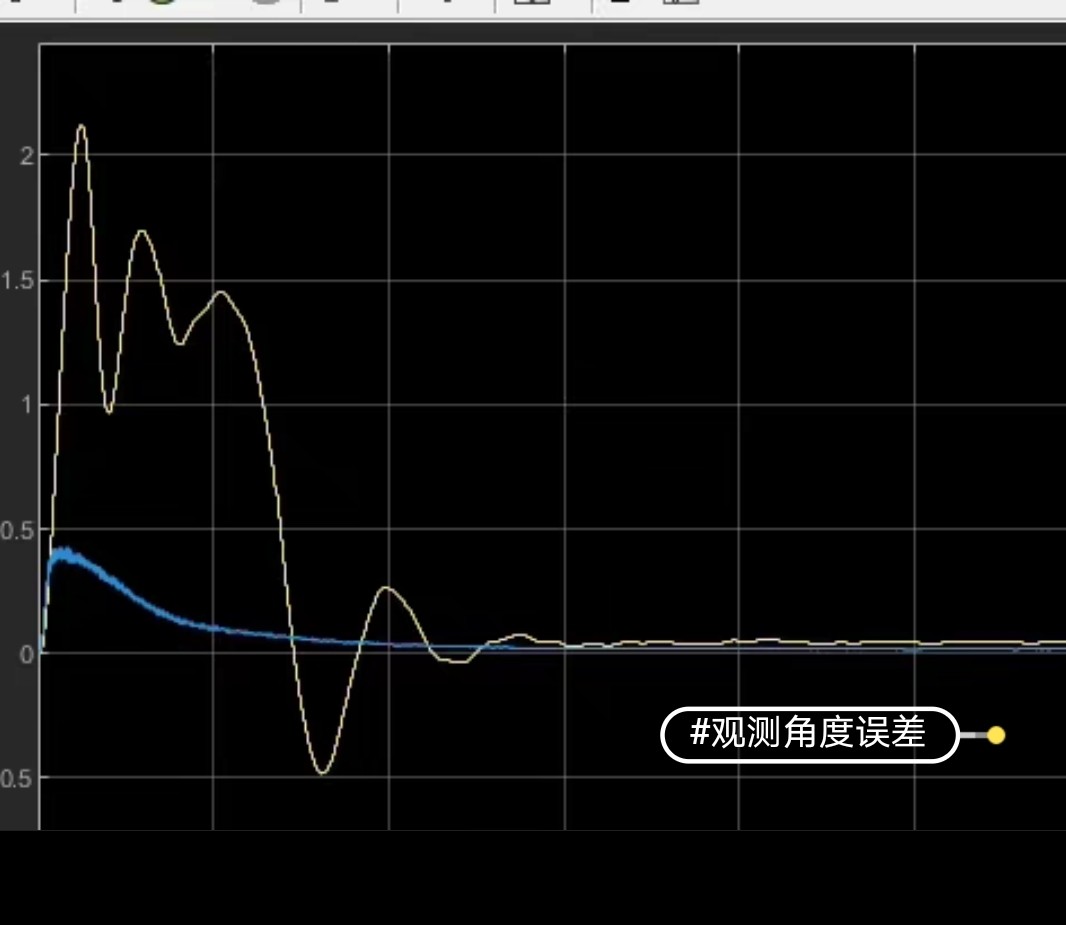
本次模型的最大亮点就是将SMO与MARS观测器模型合二为一了。以往大家看到的都是两个不同的电机模型,不同参数的双闭环,而现在我们把它们放到了同一个模型当中,并且调好了参数,这样就方便对比学习了。想象一下,你可以在同一个环境下直观地看到两种观测器的表现,分析它们的优缺点,这对于我们深入理解电机控制算法是非常有帮助的。
另外,还有袁雷的电子书籍可以帮助我们进行原理学习。这本书里包含了非常多的电机控制算法,就像是一个知识宝库,对于我们后续的学习有很大的帮助。
总之,这个SMO + PLL与MARS二合一的模型为我们探索电机观测器提供了一个新的视角和便利的工具,无论是对于初学者还是有一定经验的工程师来说,都值得去深入研究。

















 1087
1087

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









