



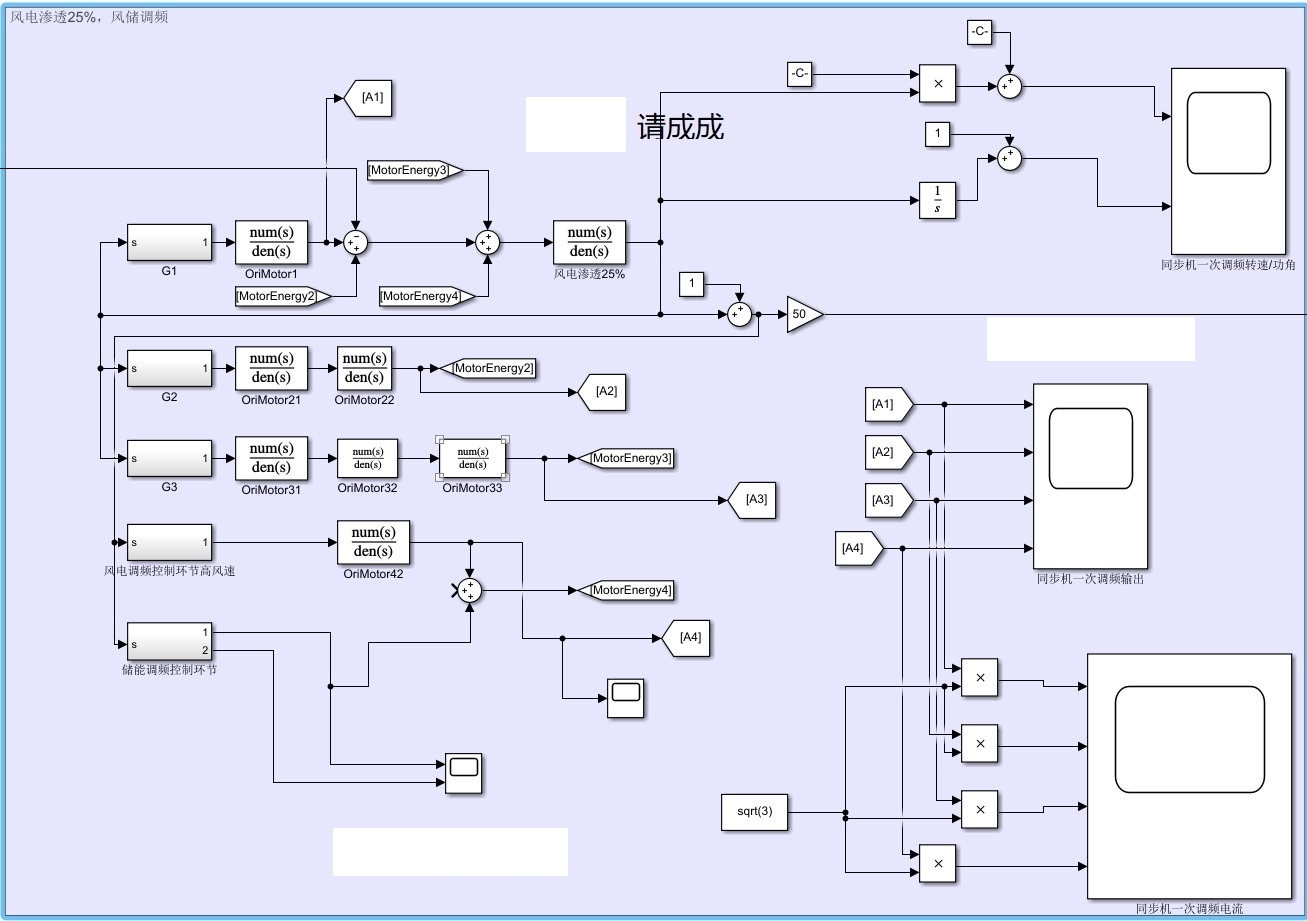
电力系统风储联合一次调频MATLAB仿真模型 四机两区系统,采用频域模型法使得风电渗透率25%,附加虚拟惯性控制,储能附加下垂控制,参与系统一次调频,频率特性good
在当今的电力系统领域,随着风能等可再生能源的大规模接入,维持系统频率稳定成为了关键挑战。今天咱们就来聊聊基于四机两区系统,实现风储联合一次调频的MATLAB仿真模型,这其中涉及频域模型法、虚拟惯性控制和下垂控制等有趣的技术点。
四机两区系统与风电渗透率
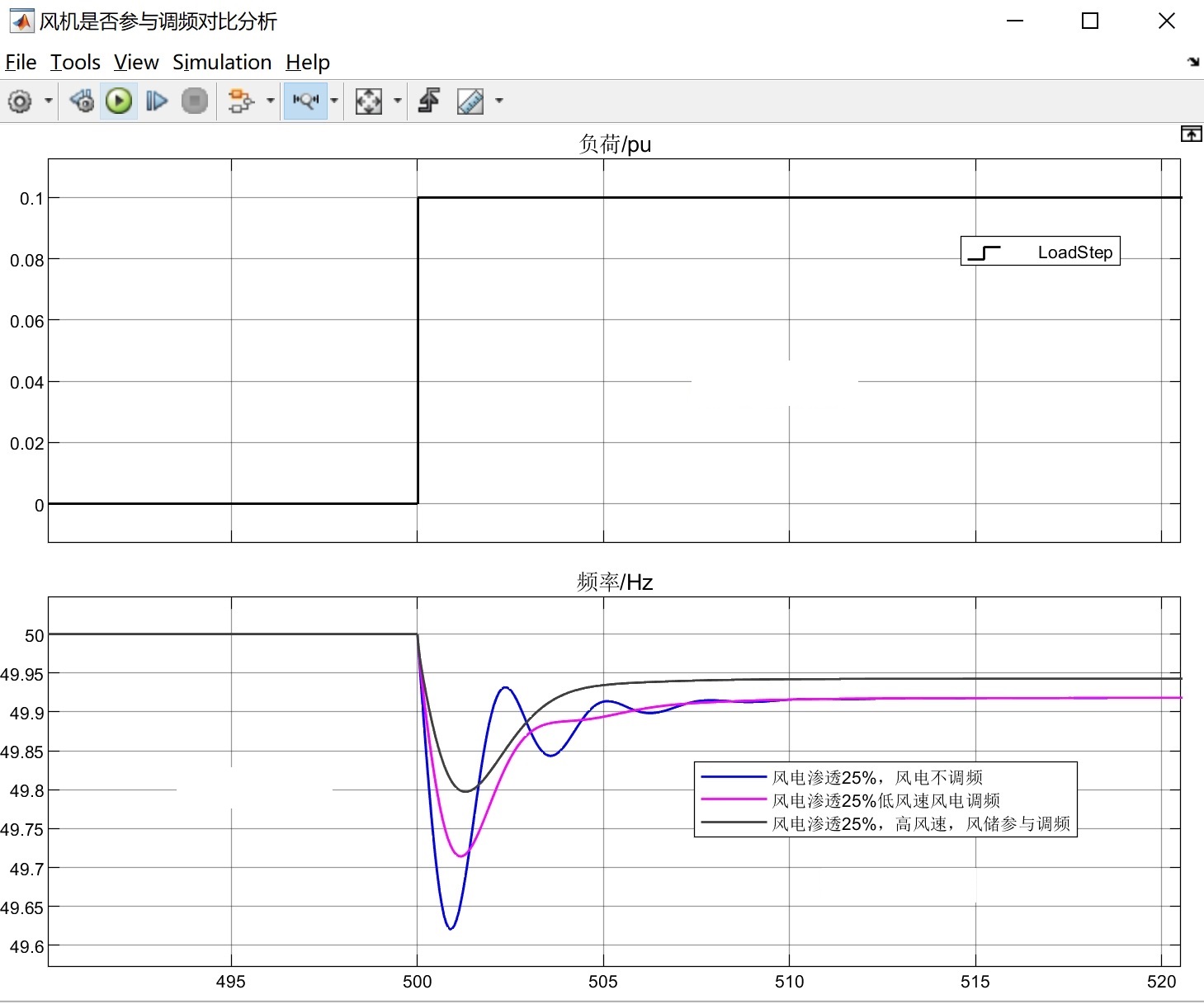
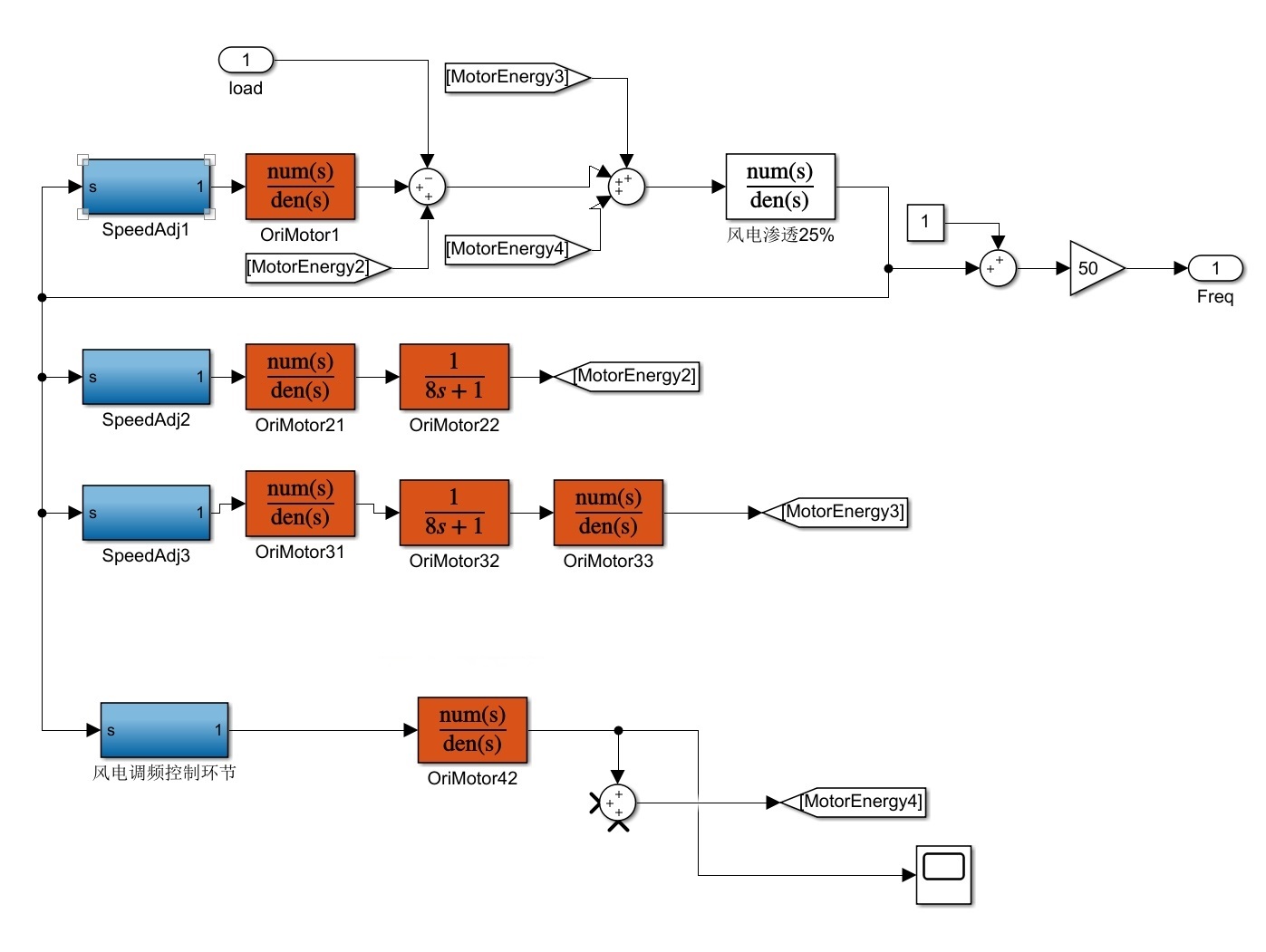
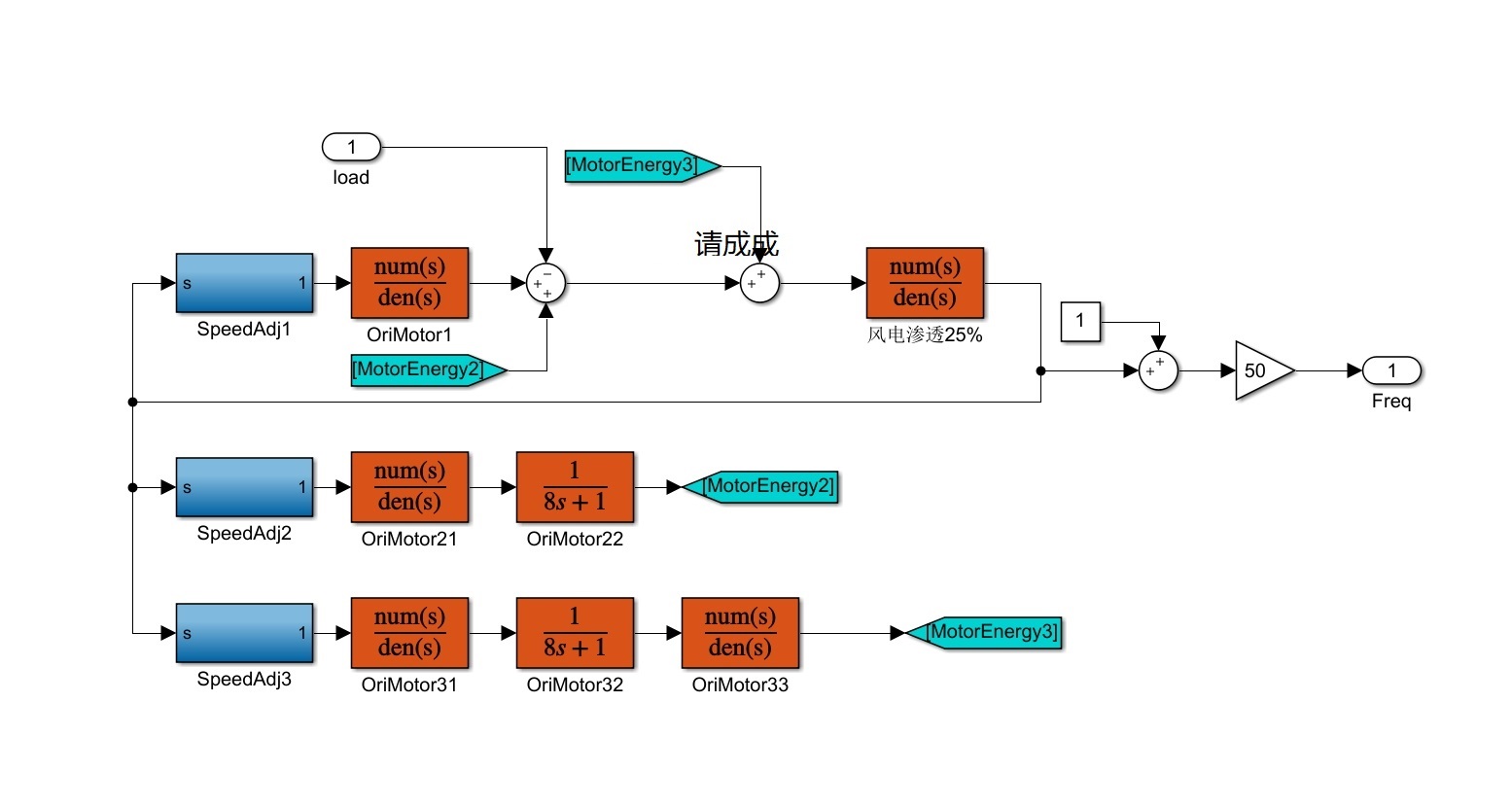
我们构建的是一个四机两区系统,这里面有4台发电机分布在两个区域,这种系统结构有助于模拟较为复杂的电力网络环境。而此次仿真采用频域模型法,将风电渗透率设定为25%。为啥是25%呢?这是在考虑到目前电力系统对于风电接入的承受能力以及稳定性平衡后确定的一个典型值。
在MATLAB里,我们可以通过如下代码片段来初步设定系统的一些基本参数,比如定义发电机的数量和风电渗透率:
% 定义发电机数量
numGen = 4;
% 设定风电渗透率
windPenetration = 0.25; 这段代码简单明了,我们用变量numGen明确了发电机数量为4,windPenetration设定了风电渗透率为25%。
附加虚拟惯性控制
风力发电由于其自身特性,不像传统同步发电机那样具有天然的惯性,这会导致系统惯性减弱,频率稳定性变差。所以,我们给风电附加虚拟惯性控制。虚拟惯性控制的核心思想就是让风电模拟出类似传统发电机的惯性响应,在系统频率变化时提供一定的支撑。
以下是一段简单的模拟虚拟惯性控制效果的代码思路(简化示意,非完整可运行代码):
% 虚拟惯性系数
Kvi = 0.5;
% 频率变化率
dfdt = calculateFreqDerivative();
% 虚拟惯性控制输出
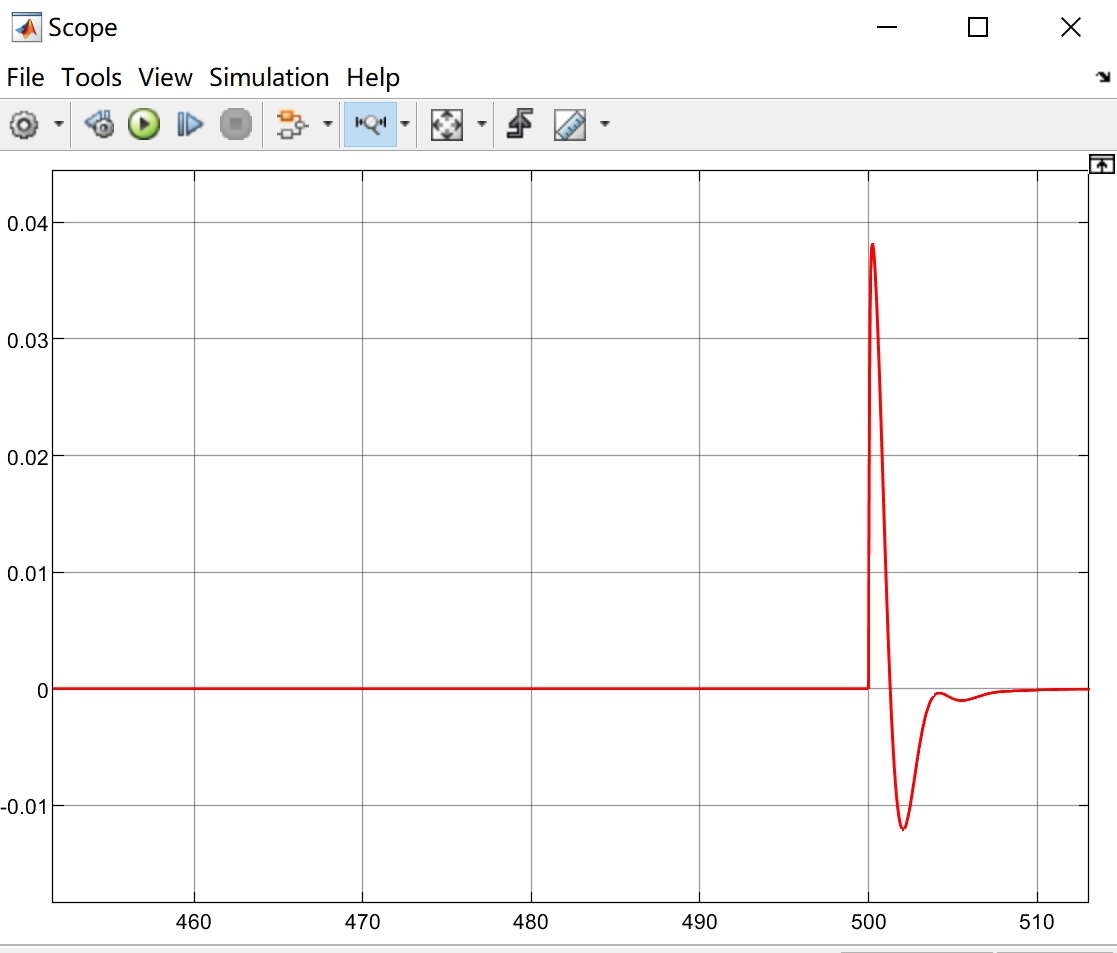
Pvi = -Kvi * dfdt; 在这段代码里,Kvi是我们设定的虚拟惯性系数,它决定了虚拟惯性控制作用的强度。dfdt通过一个函数calculateFreqDerivative()计算得出,代表频率的变化率。最后通过公式Pvi = -Kvi * dfdt得出虚拟惯性控制的输出功率Pvi,这个功率会反馈到系统中帮助稳定频率。
储能附加下垂控制
储能在风储联合一次调频中也扮演着重要角色。我们给储能附加下垂控制,其原理是当系统频率变化时,储能系统根据频率偏差按照一定的下垂特性曲线来调整自身的充放电功率。
下面是下垂控制的简单代码实现思路:
% 下垂系数
R = 0.05;
% 额定频率
f_nom = 50;
% 当前频率
f_current = getCurrentFrequency();
% 频率偏差
df = f_nom - f_current;
% 储能下垂控制输出功率
P_ESS = df / R; 这里R是下垂系数,它决定了频率偏差与储能输出功率之间的关系。fnom是额定频率,咱们国家一般是50Hz,fcurrent通过函数getCurrentFrequency()获取当前实际频率,算出频率偏差df后,依据公式PESS = df / R得到储能下垂控制的输出功率PESS。
联合调频效果与总结
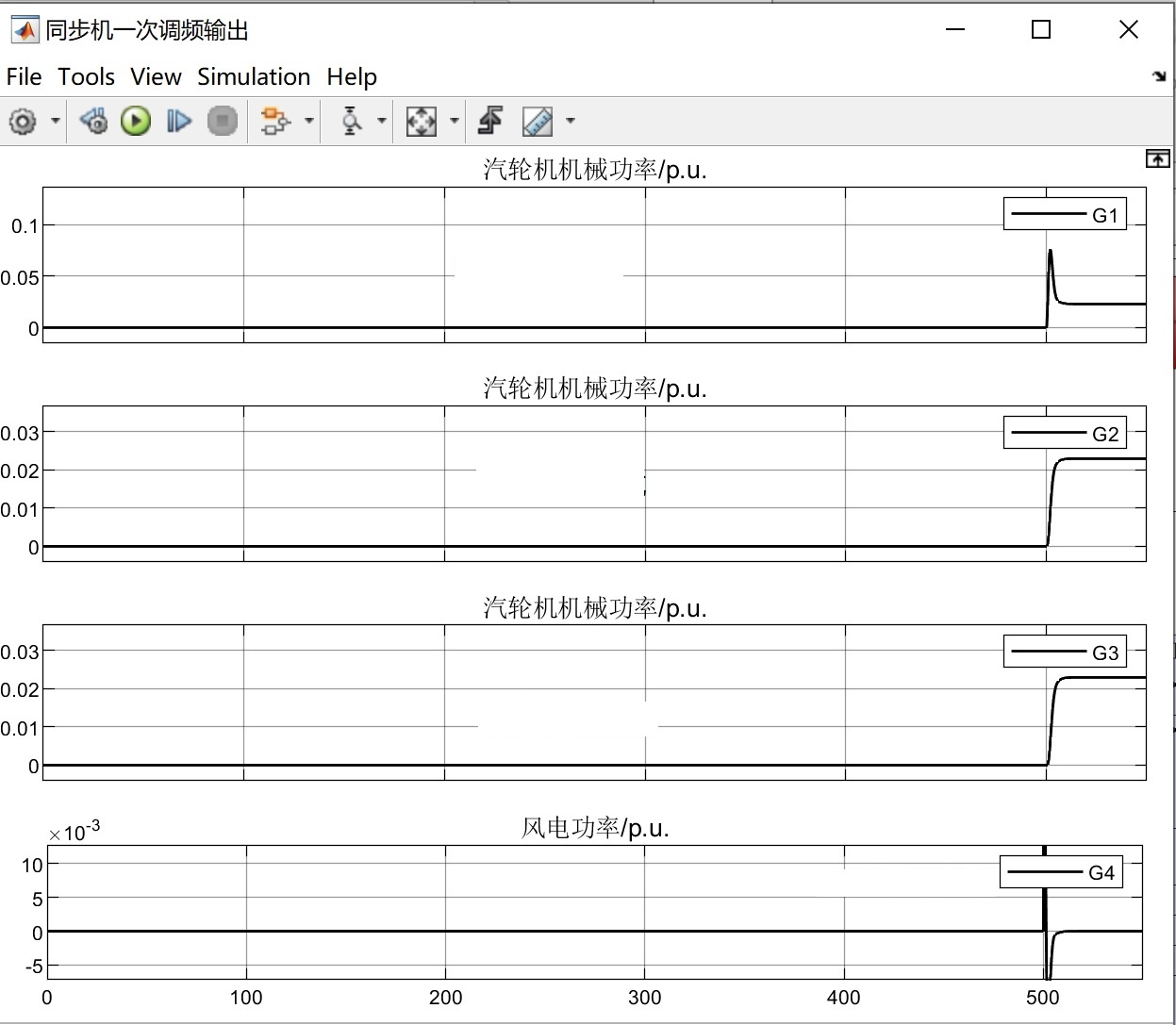
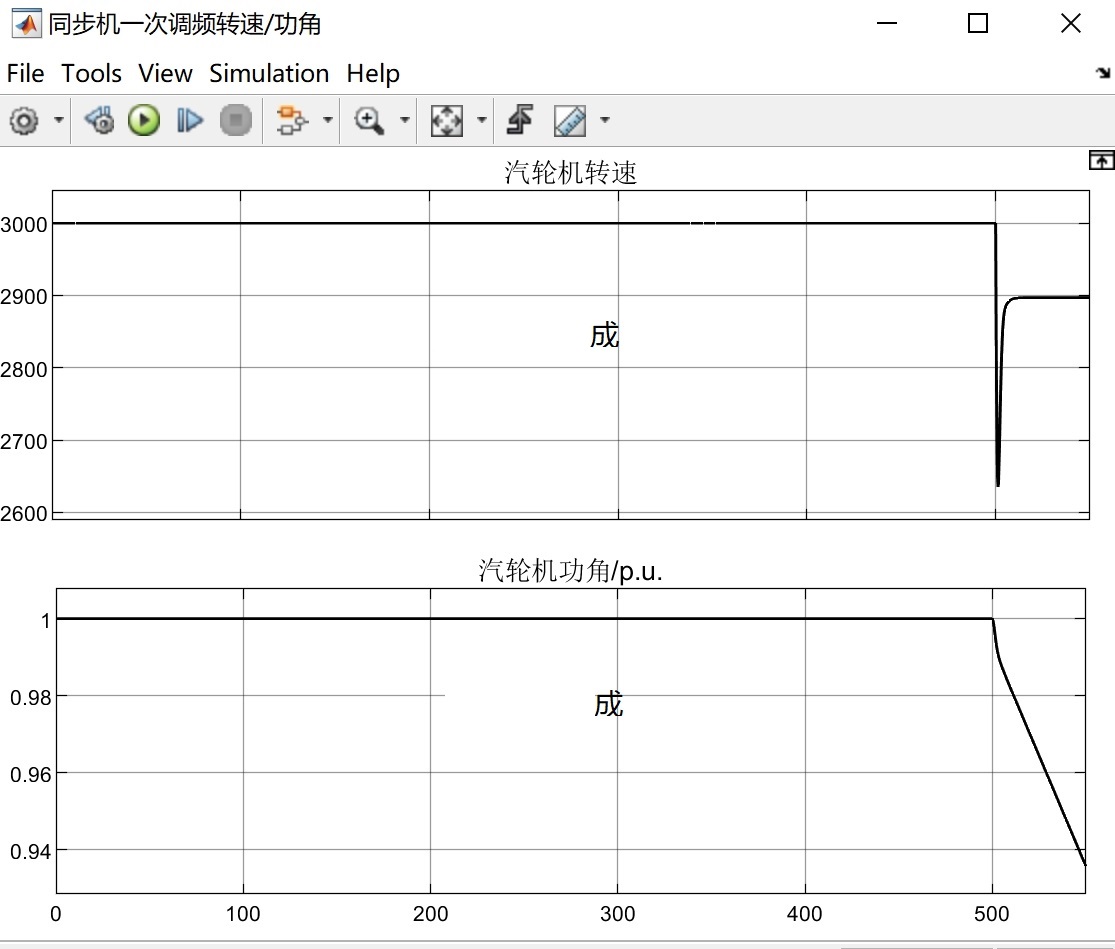
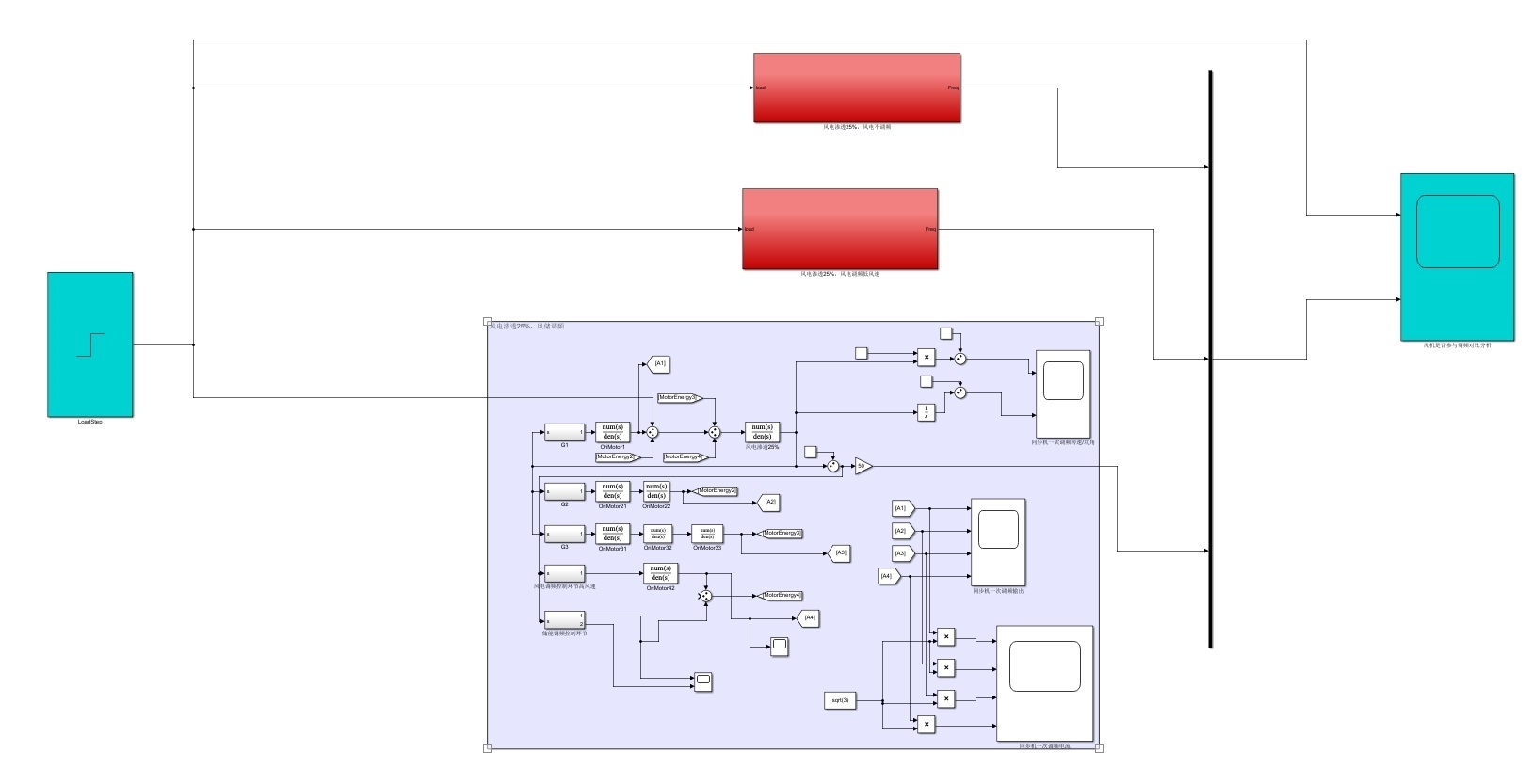
通过上述设置,风储联合参与系统一次调频,从仿真结果来看,系统的频率特性表现良好。风电的虚拟惯性控制和储能的下垂控制相互配合,在系统频率波动时,能够快速响应并提供必要的功率支撑,有效地抑制了频率的过度变化。
这种基于MATLAB的风储联合一次调频仿真模型为我们深入研究电力系统在高比例风电接入下的频率稳定性提供了有力工具,也为实际电力系统的运行和控制策略优化提供了重要参考。后续我们还可以进一步调整参数、优化控制策略,让电力系统在清洁能源浪潮下更加稳定可靠地运行。

















 1200
1200

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









