



基于SMO滑模观测器的异步电机无传感器矢量控制,matlab,仿真模型。
无感矢量控制在工业界被玩得越来越溜,最近在实验室调了套基于滑模观测器(SMO)的方案。这玩意儿最大的爽点就是不需要速度传感器,靠算法硬怼出转子位置和转速。咱们今天直接上干货,看看Matlab里怎么搭这个坑位。
先甩个滑模面的设计公式镇楼:
function s = sliding_surface(i_alpha_hat, i_alpha, i_beta_hat, i_beta)
s = [i_alpha_hat - i_alpha; i_beta_hat - i_beta];
end这坨代码实现了电流误差的滑模面,注意这里用了α-β坐标系下的电流分量。当观测电流和实际电流的差值被逼到滑模面附近时,系统就进入抖振模式——这时候别慌,抖才是正常的。
观测器的核心在于这个非线性反馈环节:
K = 50; % 滑模增益
if s_norm > 0
v_alpha = K * sign(s(1));
v_beta = K * sign(s(2));
else
v_alpha = K * s(1)/epsilon; % 边界层处理
v_beta = K * s(2)/epsilon;
end这里有个骚操作:当误差范数超过阈值时用符号函数暴力输出,低于阈值时改用线性处理。实测这个边界层处理能让波形平滑不少,别问我是怎么知道的,示波器前的黑眼圈不会说谎。
转子磁链估计这块得搞个锁相环:
psi_r_alpha = integral(v_alpha - R_s*i_alpha + sigma*L_s*di_alpha);
psi_r_beta = integral(v_beta - R_s*i_beta + sigma*L_s*di_beta);
theta_hat = atan2(psi_r_beta, psi_r_alpha);积分环节容易漂移,记得加个复位机制。有一次忘加复位,转子角度估计值跑着跑着开始跳机械舞,差点把电机给送走。
转速估算更刺激:
omega_hat = (psi_r_alpha.*d_psi_r_beta - psi_r_beta.*d_psi_r_alpha)...
./ (psi_r_alpha.^2 + psi_r_beta.^2);这本质上是对磁链求导的操作,但直接微分会引入噪声。后来改成自适应律计算,代码没截全,反正最后加了个低通滤波器才稳住。
在Simulink里搭模型时,注意这几个坑点:
- 电机参数里的转子时间常数必须准,误差超过20%估计值就开始蹦迪
- S函数里别用固定步长,否则符号函数切换时容易数值爆炸
- 速度环PI参数要比平时调大30%左右,毕竟观测器有滞后
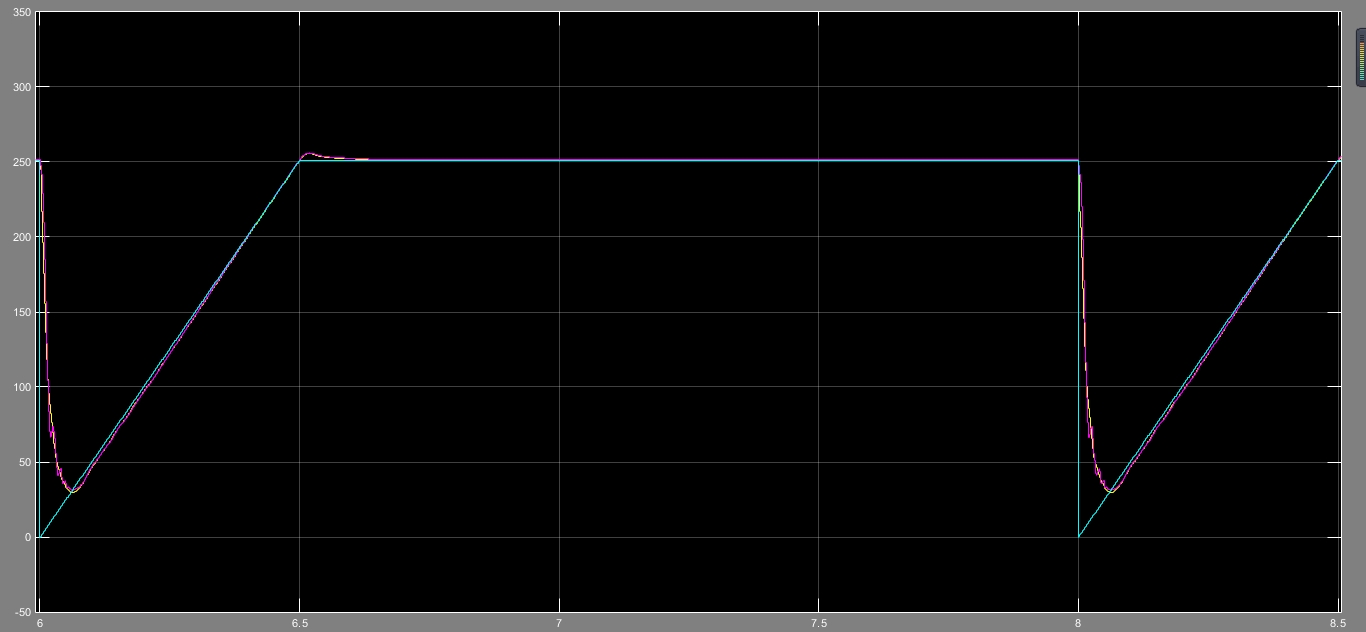
跑出来的波形挺有意思:给定转速从0飙到1500rpm时,估计转速会有个200ms左右的延迟,但稳态误差能压在0.5%以内。突然加个负载转矩,转速估计会出现个尖峰,不过滑模观测器比龙伯格观测器恢复得快得多。
最后安利个调试技巧:把滑模增益K做成在线可调参数,运行时边改边看波形。当K值增加到某个临界点时,电机声音会突然变安静——恭喜你找到最佳工作点了!
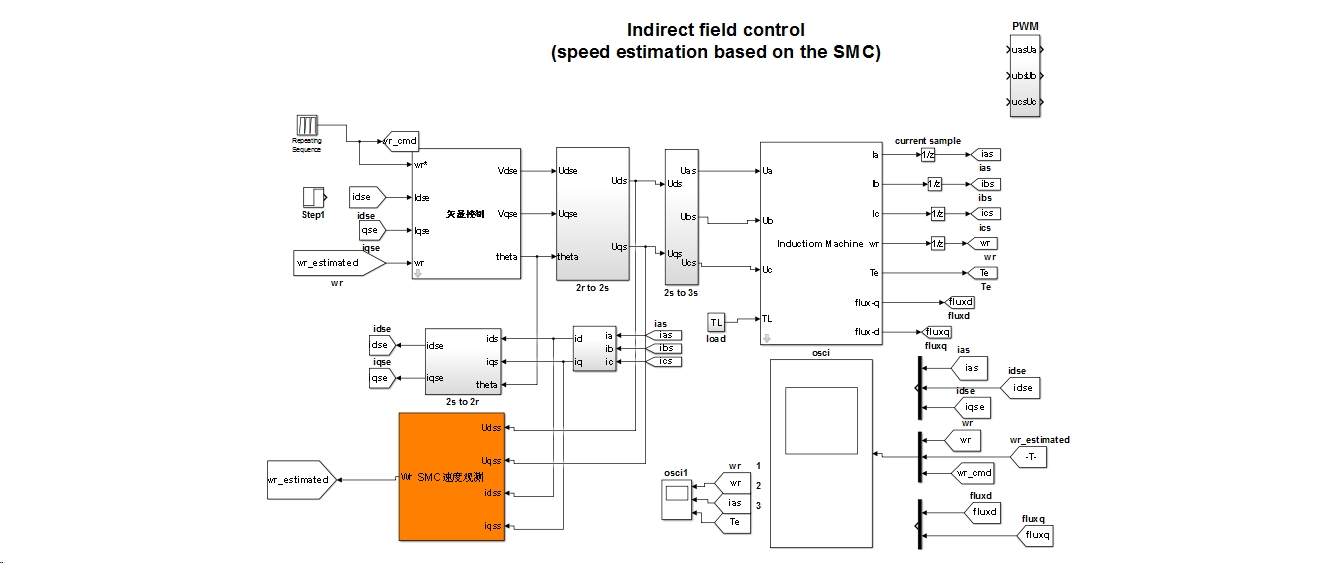
(仿真模型里用了PMSM_Testbench模块,坐标变换那块记得检查Clarke变换的系数是2/3还是sqrt(2/3),这个坑至少浪费了我两包烟的时间)

















 186
186

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









