



Matlab:利用势能法和切片法编写关于斜齿轮时变啮合刚度求解模型的Matlab程序,根据端面和轴面重合度的大小比较,分为了两种计算方法,以此作为计算,然后根据周期变化计算得到整个啮合过程的综合刚度啮合曲线,并得到拟合公式! 内含详细解答
MATLAB 代码和参考文献《斜齿轮时变啮合刚度算法修正及影响因素研究》撰写的功能说明文章,适用于技术报告、项目文档或学术论文中的方法介绍部分。
一、研究背景
斜齿轮传动系统在高速、重载工况下表现出良好的平稳性和承载能力,其时变啮合刚度是引起系统振动与噪声的主要激励源之一。准确计算斜齿轮的时变啮合刚度,对齿轮系统的动态特性分析、故障诊断与减振设计具有重要意义。
传统的势能法在计算斜齿轮啮合刚度时,往往忽略齿根圆与基圆不重合的影响,导致计算误差较大。本文基于切片法与势能法,结合重合度分段模型,提出了一种修正的斜齿轮时变啮合刚度计算方法,并通过 MATLAB 实现。
二、方法原理
2.1 势能法与切片法基础
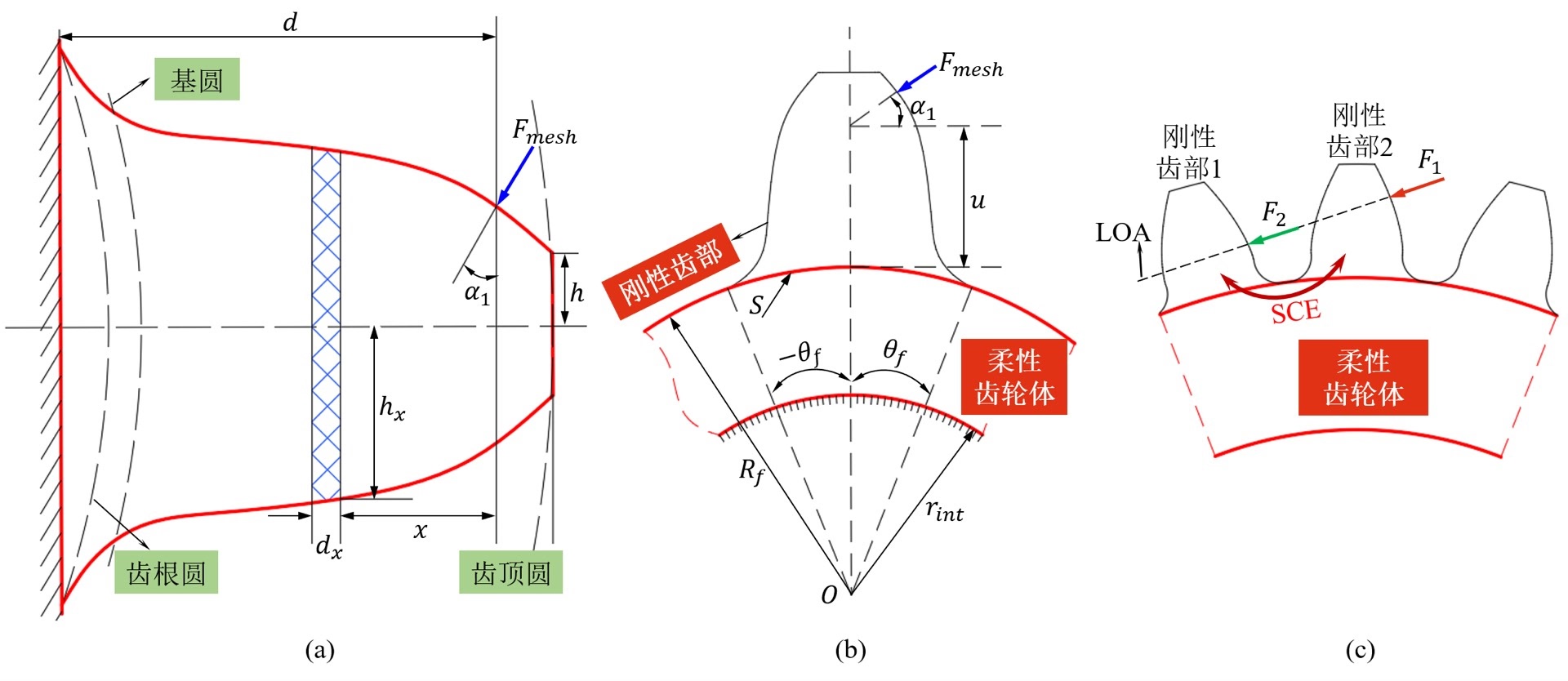
将斜齿轮齿面沿齿宽方向切分为若干薄片,每片视为一个变截面悬臂梁。在啮合过程中,各片依次进入和退出啮合,总刚度为各片刚度的并联组合。
斜齿轮的啮合刚度包括:
- 赫兹接触刚度 \( k_h \)
- 弯曲刚度 \( k_b \)
- 剪切刚度 \( k_s \)
- 轴向压缩刚度 \( k_a \)
- 基体刚度 \( k_f \)
总刚度计算公式为:
\[
\frac{1}{k} = \frac{1}{kh} + \sum \left( \frac{1}{k{b}} + \frac{1}{k{s}} + \frac{1}{k{a}} + \frac{1}{k_{f}} \right)
\]
2.2 重合度分段模型
根据端面重合度 \( \varepsilon\alpha \) 与轴向重合度 \( \varepsilon\beta \) 的大小关系,将单齿啮合过程分为三个阶段:
- 啮入段:接触线长度线性增加
- 稳定段:接触线长度保持最大
- 啮出段:接触线长度线性减小
2.3 齿根圆与基圆不重合的修正
传统模型将齿根简化为基圆起始的悬臂梁,忽略了齿根圆与基圆之间的过渡区域。本文通过分段积分方法,分别计算基圆以上和基圆以下部分的变形能,显著提高了刚度计算精度。
三、MATLAB 程序功能说明
3.1 主要模块
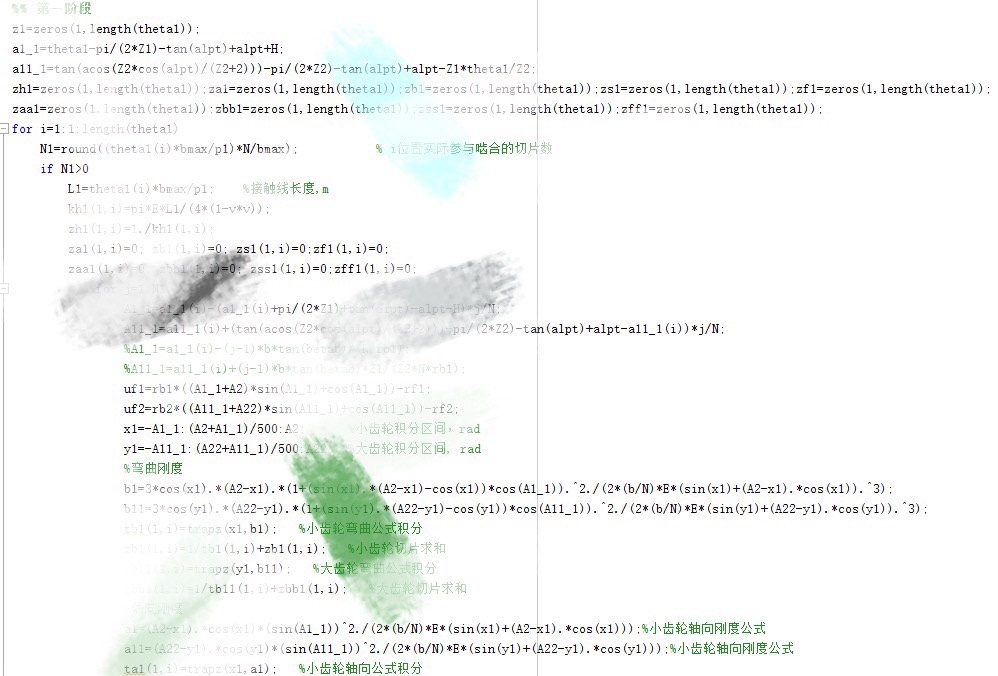
(1)`stiffness1.m`:单齿啮合刚度计算
- 输入齿轮参数(齿数、模数、螺旋角、压力角、齿宽等)
- 根据重合度大小判断计算方法(\( \varepsilon\alpha > \varepsilon\beta \) 或 \( \varepsilon\alpha < \varepsilon\beta \))
- 分三个阶段计算接触线长度与各刚度分量
- 输出单齿在一个完整啮合周期内的刚度曲线
(2)`matr2_gangdu_pingyi_stiff.m`:综合刚度合成与拟合
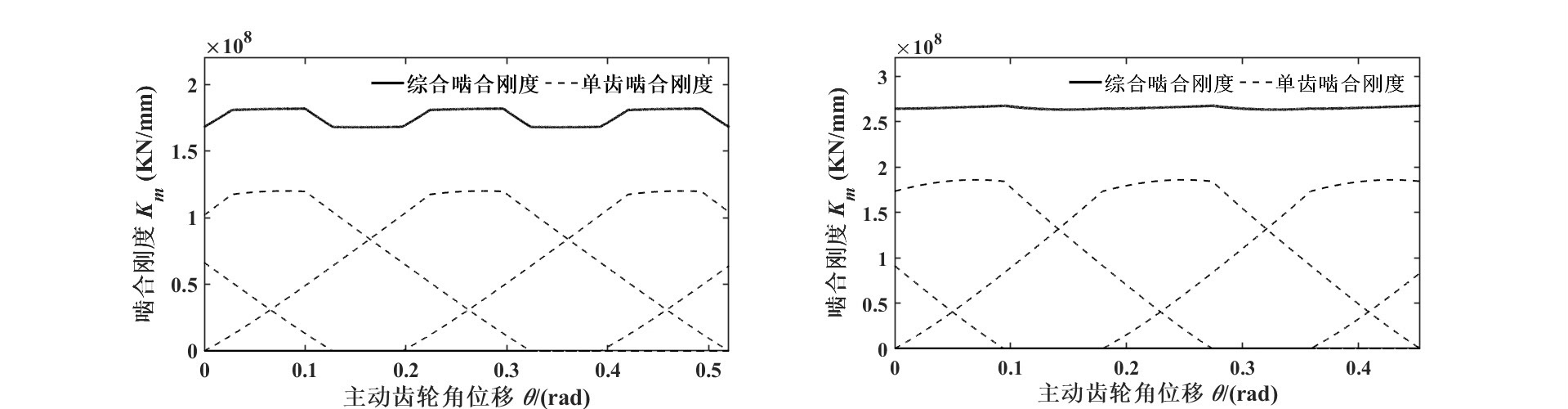
- 将单齿刚度曲线进行周期平移叠加,得到多齿啮合的综合刚度
- 使用傅里叶级数对综合刚度曲线进行拟合,得到解析表达式
- 绘制单齿刚度与综合刚度对比图
3.2 关键技术点
- 切片数可调:
N=1000,可根据精度需求调整 - 重合度自适应:自动判断端面与轴向重合度大小,选择相应算法
- 基圆修正:考虑齿根圆与基圆不重合的影响
- 傅里叶拟合:提供两种拟合公式,便于后续动力学建模使用
四、输出结果
程序输出包括:
- 单齿啮合刚度曲线(分三个阶段)
- 综合啮合刚度曲线(多齿叠加)
- 拟合公式(傅里叶级数形式),例如:
\[
K(t) = a0 + \sum{n=1}^6 \left[ an \cos(n\omega t) + bn \sin(n\omega t) \right]
\]
五、应用价值
本模型适用于:
- 斜齿轮系统动态响应分析
- 齿轮箱振动与噪声预测
- 齿轮参数优化设计
- 故障齿轮刚度退化建模
六、参考文献
刘文, 李瑞, 张金红, 等. 斜齿轮时变啮合刚度算法修正及影响因素研究[J]. 湖南大学学报(自然科学版), 2018, 45(2): 1–10.

















 1202
1202

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









