




前言
前天发了一个推文【目标检测Anchor-Free】CVPR 2019 CenterNet,讲解的是CenterNet: Keypoint Triplets for Object Detection这篇论文,今天要讲的这篇论文全名是Object as Points。这篇论文提出的网络也被叫作CenterNet,和前面介绍的CenterNet重名了,注意加以区别。论文原文见附录。
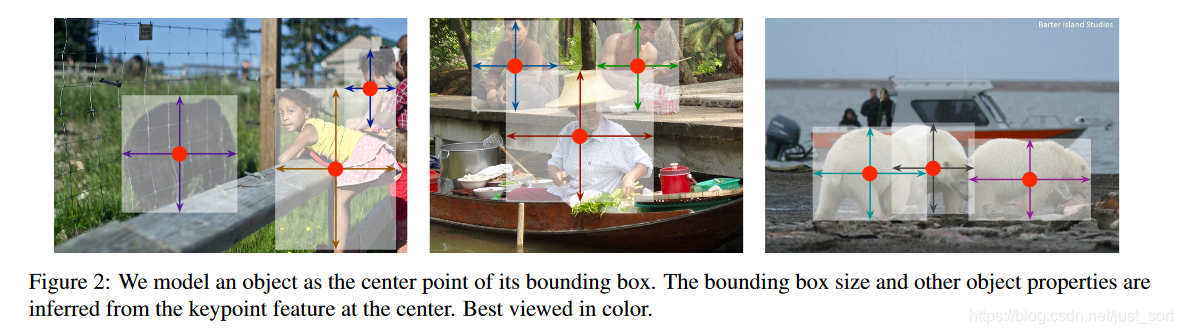
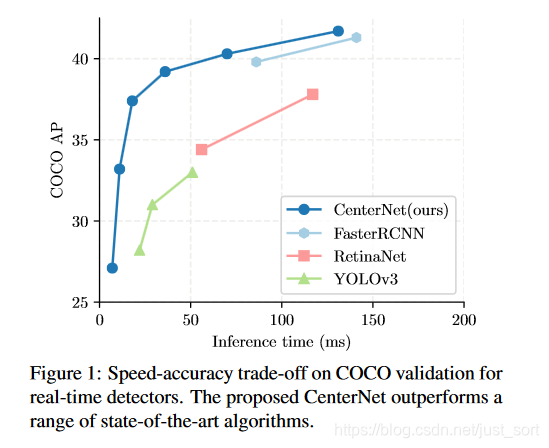
摘要:目标检测往往是在图像上将目标以矩形框的形式标出。大多数先进的目标检测算法都是基于Anchor框来穷举可能出现目标的位置,然后针对该位置进行目标的分类和回归,这种做法浪费时间,低效,并且需要额外的后处理(NMS)。这篇论文使用不同的方法,构建模型时将目标作为一个点,即目标BBox的中心点。并且检测器使用关键点估计来找到中心点,并回归其它的目标属性,例如尺寸,3D位置,方向,甚至姿态。这个模型被论文叫做CenterNet,这个模型是端到端可微的,更简单,更快速,更准确。下面是其性能:1:Resnet-18 with up-convolutional layers : 28.1% coco and 142 FPS 。2:DLA-34 : 37.4% COCOAP and 52 FPS 。3:Hourglass-104 : 45.1% COCOAP and 1.4 FPS。
下面的Figure2展示了使用CenterNet目标检测器检测目标的一个可视化效果。
贡献
CenterNet的创新点如下:
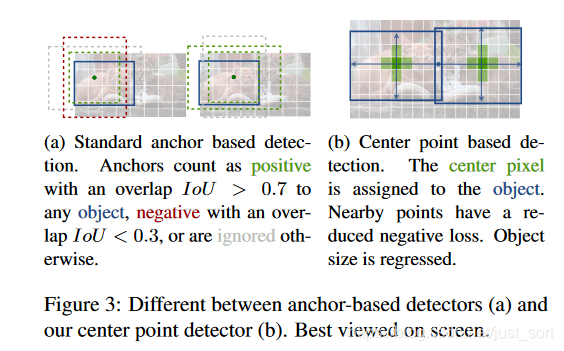
- 用heatmap预测的目标中心点代替Anchor机制来预测目标,使用更大分辨率的输出特征图(相对于原图缩放了4倍),因此无需用到多层特征,实现了真正的Anchor-Free。CenterNet和Anchor-Based检测器的区别如Figure3所示。
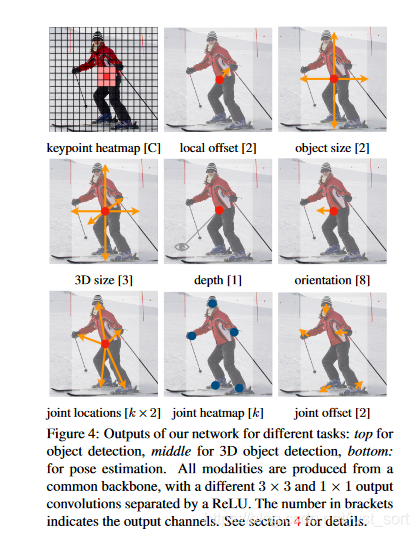
- 网络可拓展性非常强,论文中介绍了实现3D目标检测和人体姿态估计任务。具体来说对于3D目标检测,直接回归得到目标的深度信息,3D目标框的尺寸,目标朝向;对于人体姿态估计来说,将关键点位置作为中心的偏移量,直接在中心点回归出这些偏移量的值。例如对于姿态估计任务需要回归的信息如Figure4所示。
- 由于模型设计简单,因此在运行速度和精度的平衡上取得了很好的结果。
网络设计
网络结构
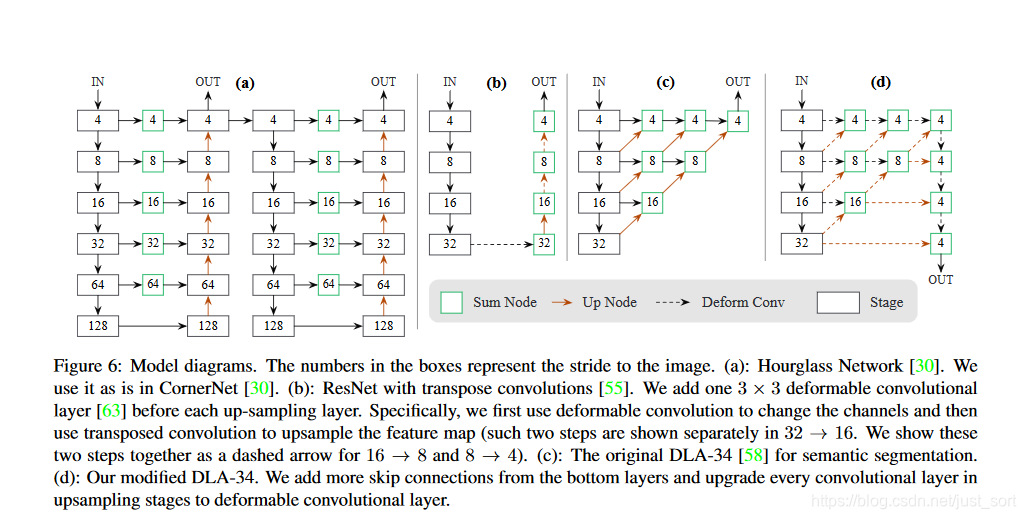
CenterNet的网络结构如Figure6所示。对于2D目标检测任务来说,CenterNet输入 512 × 512 512\times 512 512×512分辨率的图像,预测 2 2 2个目标中心点坐标和 2 2 2个中心点的偏置。以及 80 80 80个类别信息。其中Figure6(a)表示Hourglass-104,Figure6(b)表示带有反卷积做上采样的ResNet-18,Figure6(c)表示经典的DLA-34网络,而Figure6(d)表示改进的DLA-34网络。
注意这几个结构都是Backbone网络,最后只需要在输出特征图上接卷积层映射结果即可。比如在目标检测任务中,用官方的源码(使用Pytorch)来表示一下最后三层,其中hm为heatmap、wh为对应中心点的width和height、reg为偏置量:
(hm): Sequential(
(0): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU(inplace)
(2): Conv2d(64, 80, kernel_size=(1, 1), stride=(1, 1))
)
(wh): Sequential(
(0): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU(inplace)
(2): Conv2d(64, 2, kernel_size=(1, 1), stride=(1, 1))
)
(reg): Sequential(
(0): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU(inplace)
(2): Conv2d(64, 2, kernel_size=(1, 1), stride=(1, 1))
)
前置内容
令 I ∈ R H × W × 3 I\in R^{H\times W\times 3} I∈RH×W×3为输入图像,宽为 W W W,高为 H H H。我们的目标是生成关键点热力图 Y ^ ∈ [ 0 , 1 ] W R × H R × C \hat{Y}\in [0,1]^{\frac{W}{R} \times \frac{H}{R}\times C} Y^∈[0,1]RW×RH×C,其中 R R R是输出步长(即尺度缩放比例), C C C是关键点参数(即输出特征通道数);关键点类型有 C = 17 C=17 C=17的人体关键点,用于姿态估计。 C = 80 C=80 C=80的目标类别,用于目标检测。我们默认 R = 4 R=4 R=4; Y ^ x , y , c = 1 \hat{Y}_{x,y,c}=1 Y^x,y,c=1表示检测到的关键点,而 Y ^ x , y , c = 0 \hat{Y}_{x,y,c}=0 <
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2536
2536

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









